






本章节是基于前面系列进行
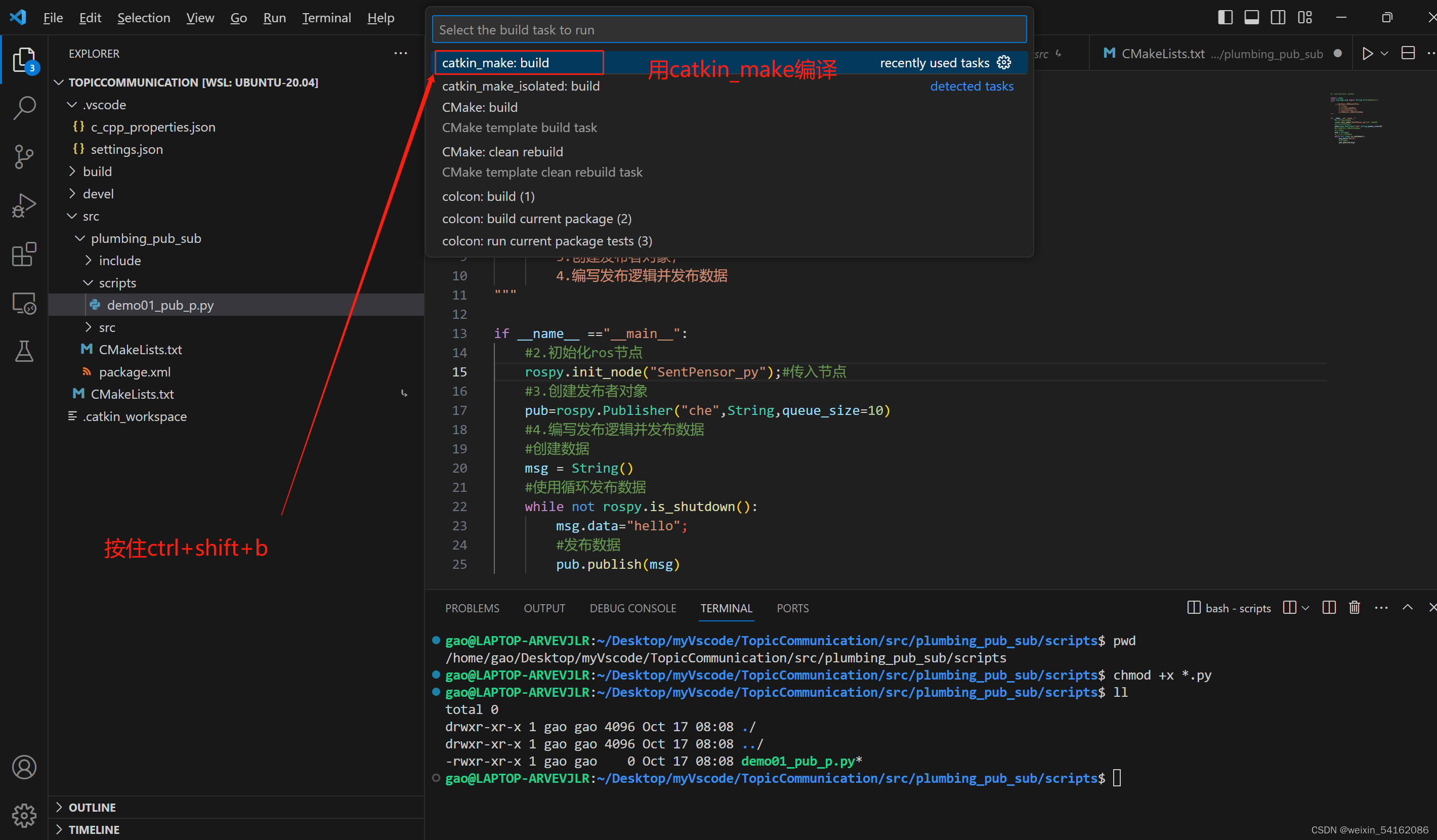
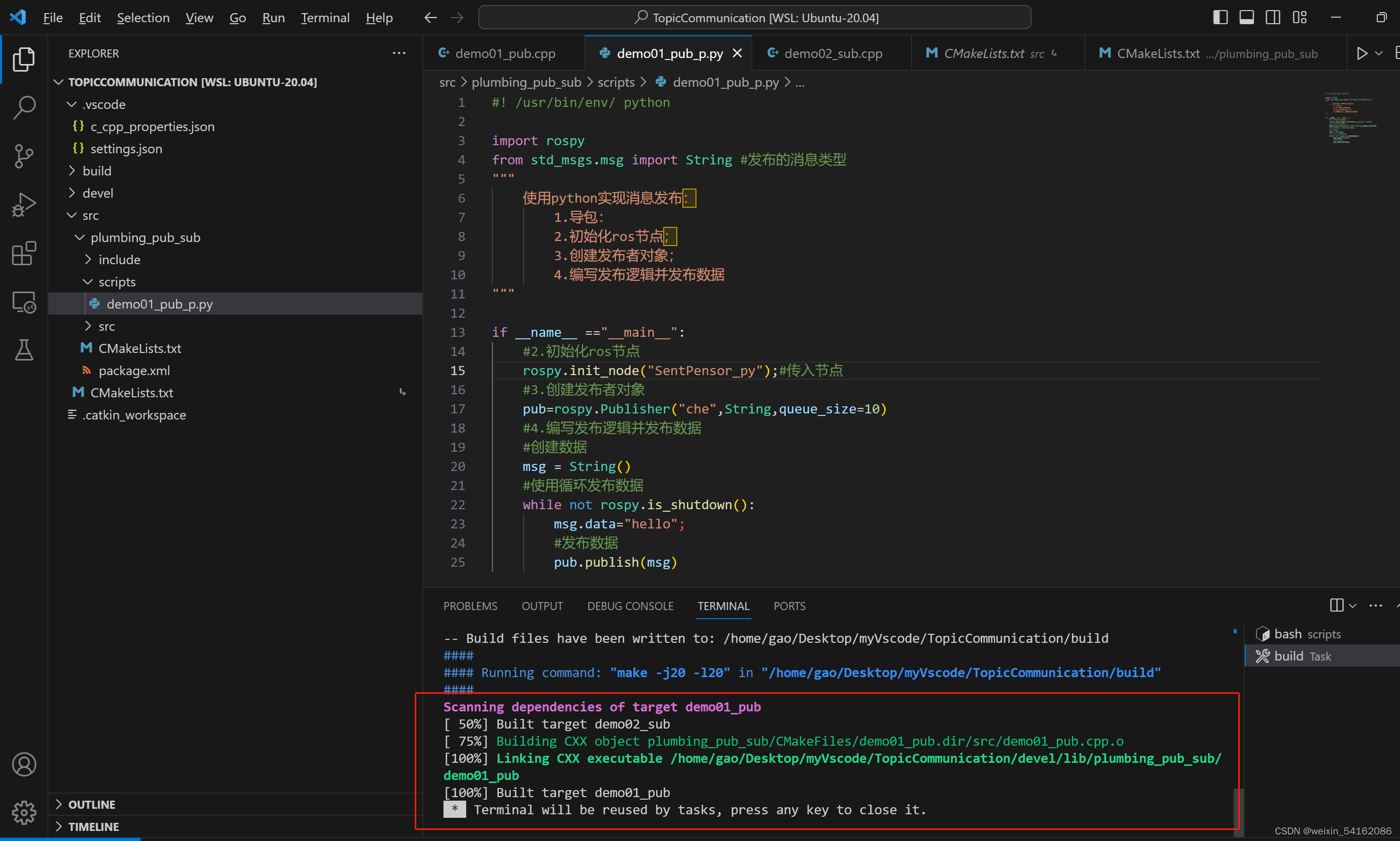
一、创建发送方

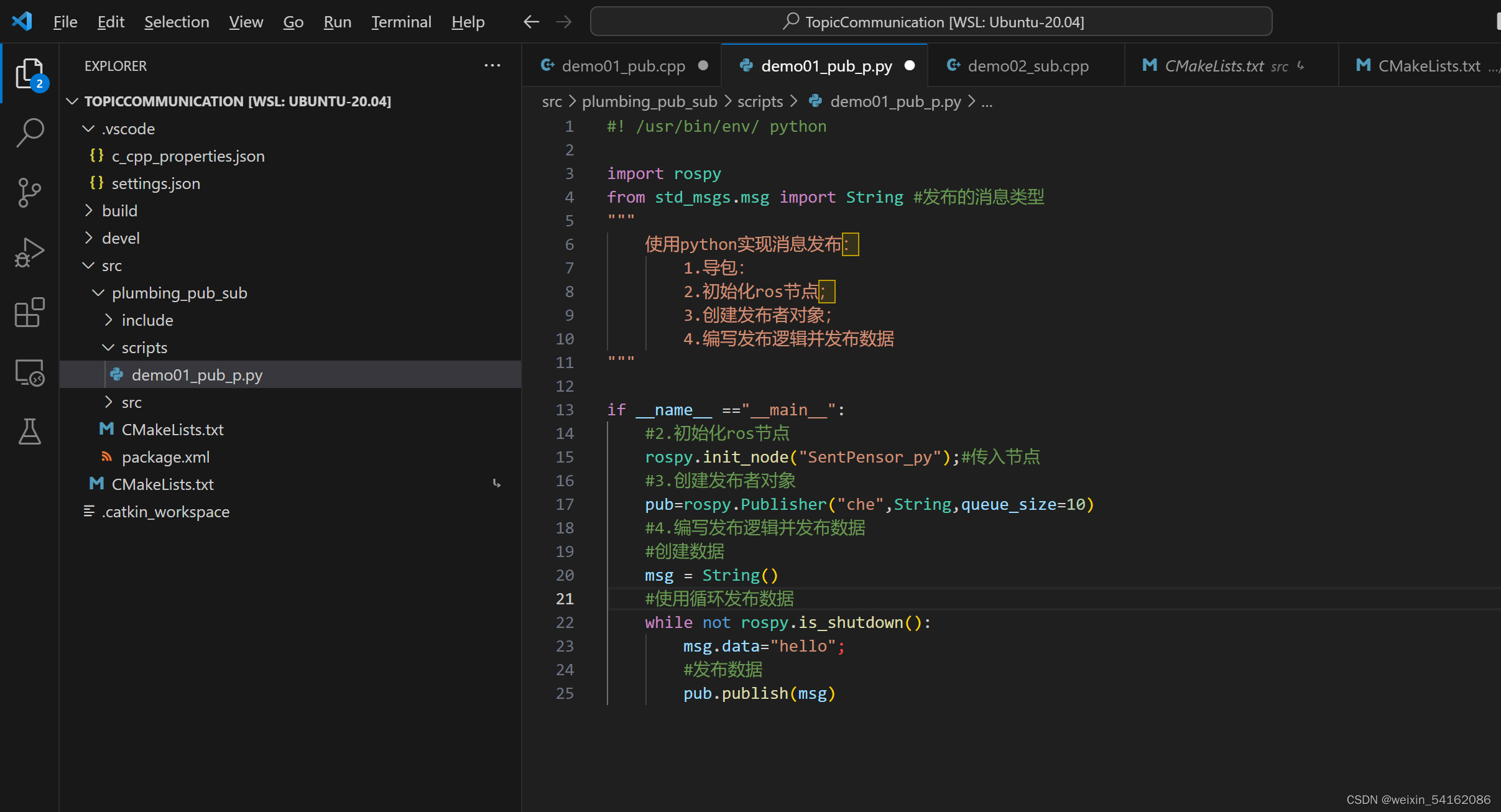
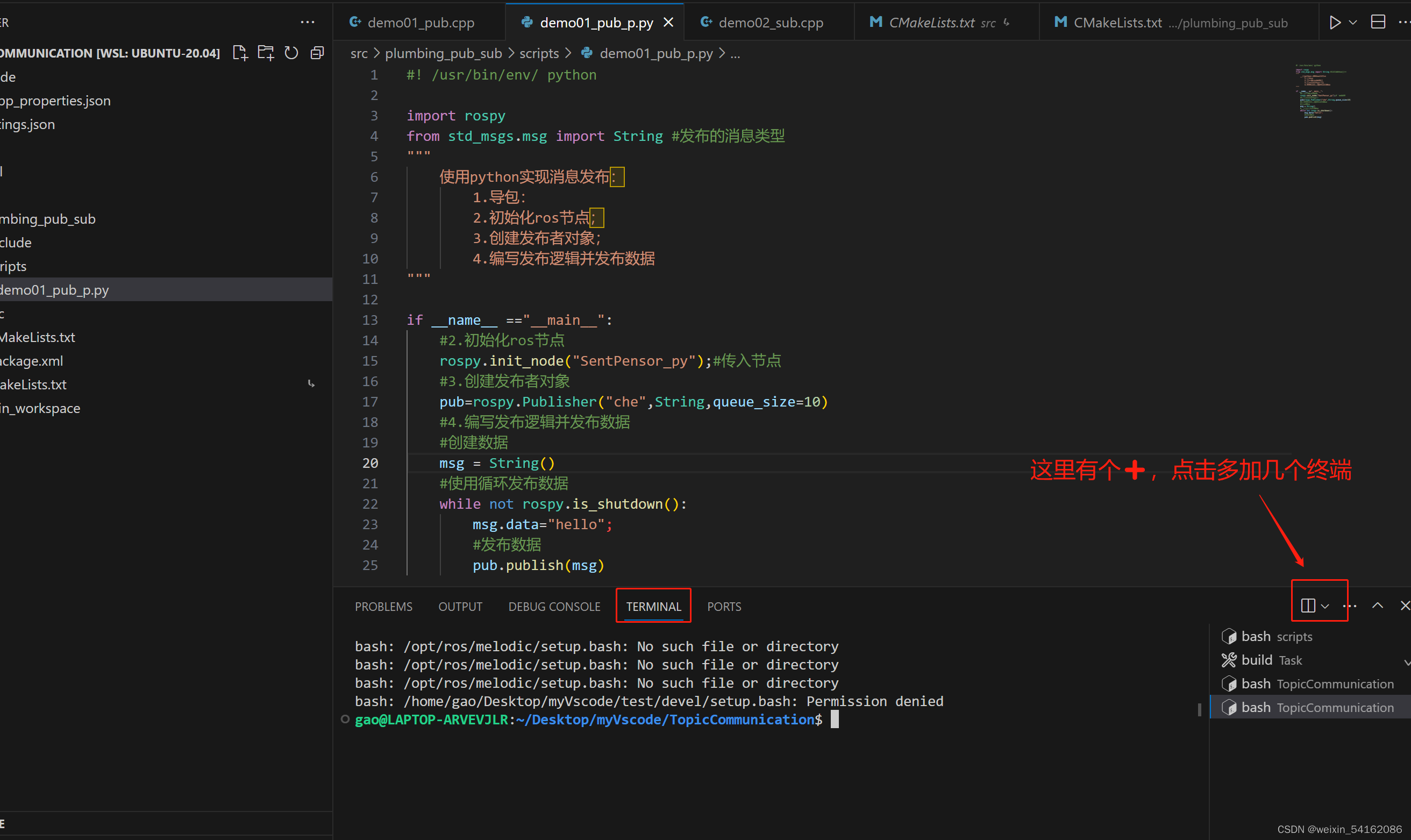
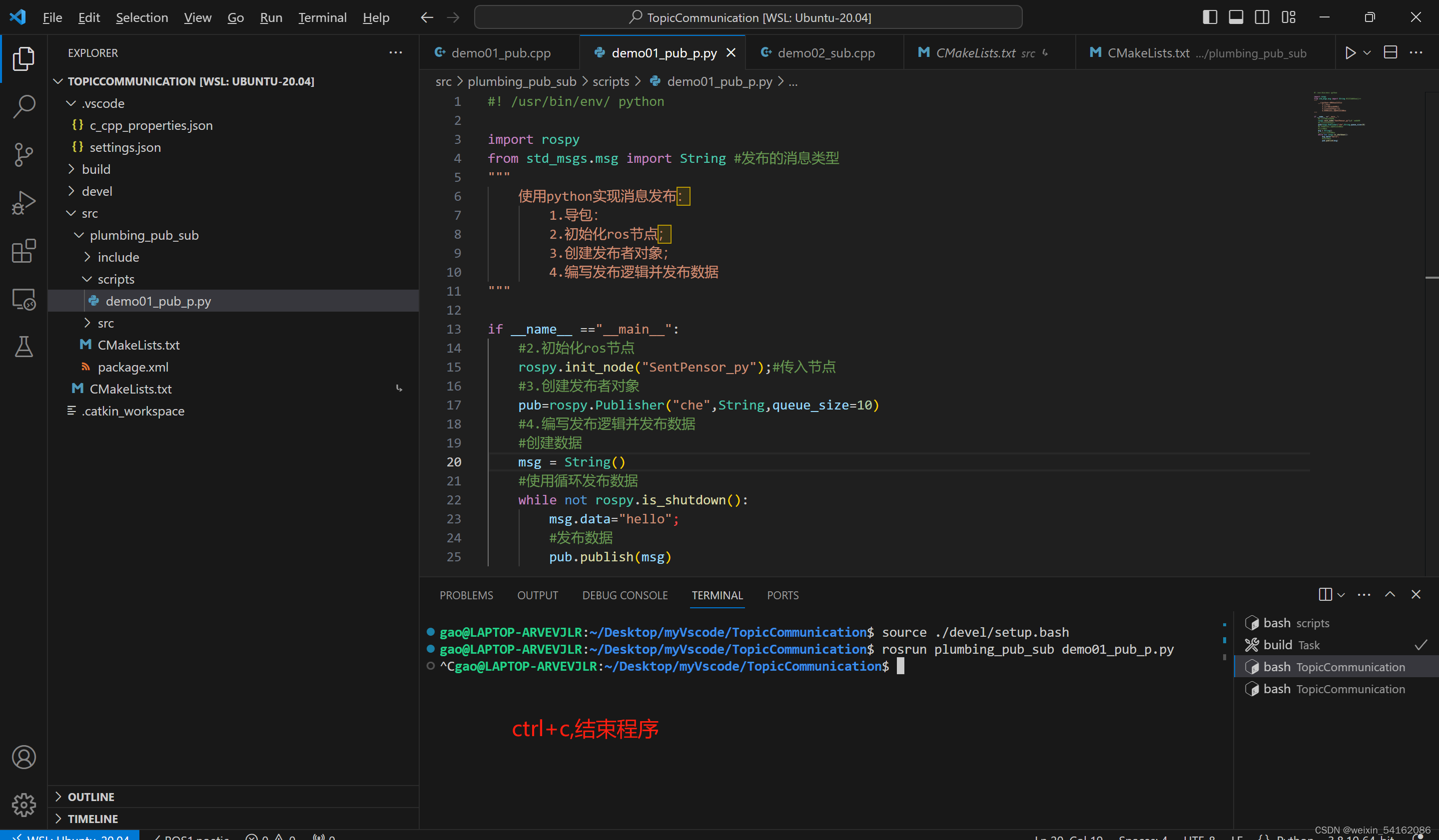
#! /usr/bin/env/ python
import rospy
from std_msgs.msg import String #发布的消息类型
"""
使用python实现消息发布:
1.导包:
2.初始化ros节点;
3.创建发布者对象;
4.编写发布逻辑并发布数据
"""
if __name__ =="__main__":
#2.初始化ros节点
rospy.init_node("SentPensor_py");#传入节点
#3.创建发布者对象
pub=rospy.Publisher("che",String,queue_size=10)
#4.编写发布逻辑并发布数据
#创建数据
msg = String()
#指定发布频率
rate = rospy.Rate(1)
#计数器
count =0
#使用循环发布数据
while not rospy.is_shutdown():
count +=1
msg.data="hello"+str(count)
#发布数据
pub.publish(msg)
rospy.loginfo("发布数据:%s",msg.data)
rate.sleep()
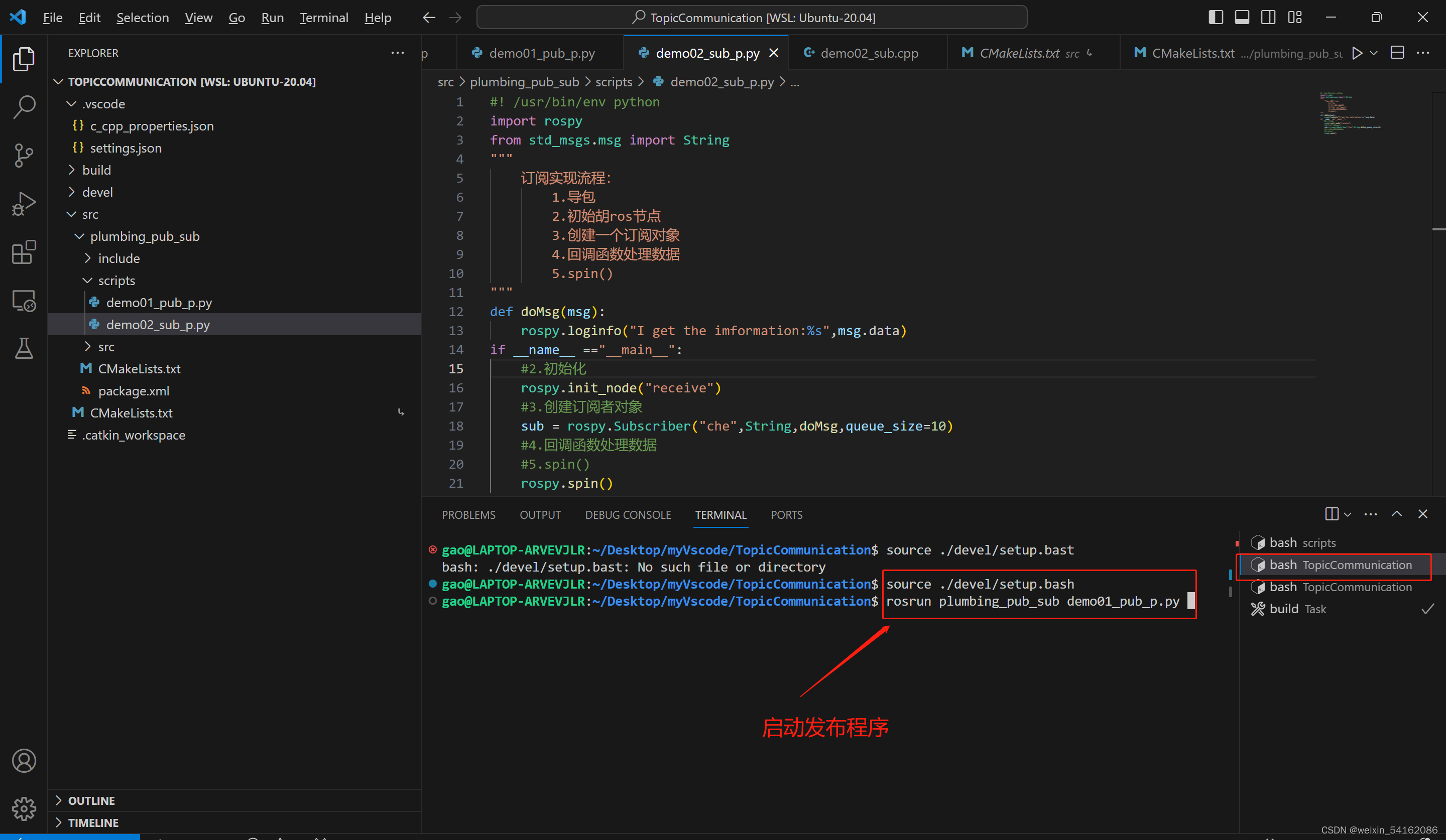
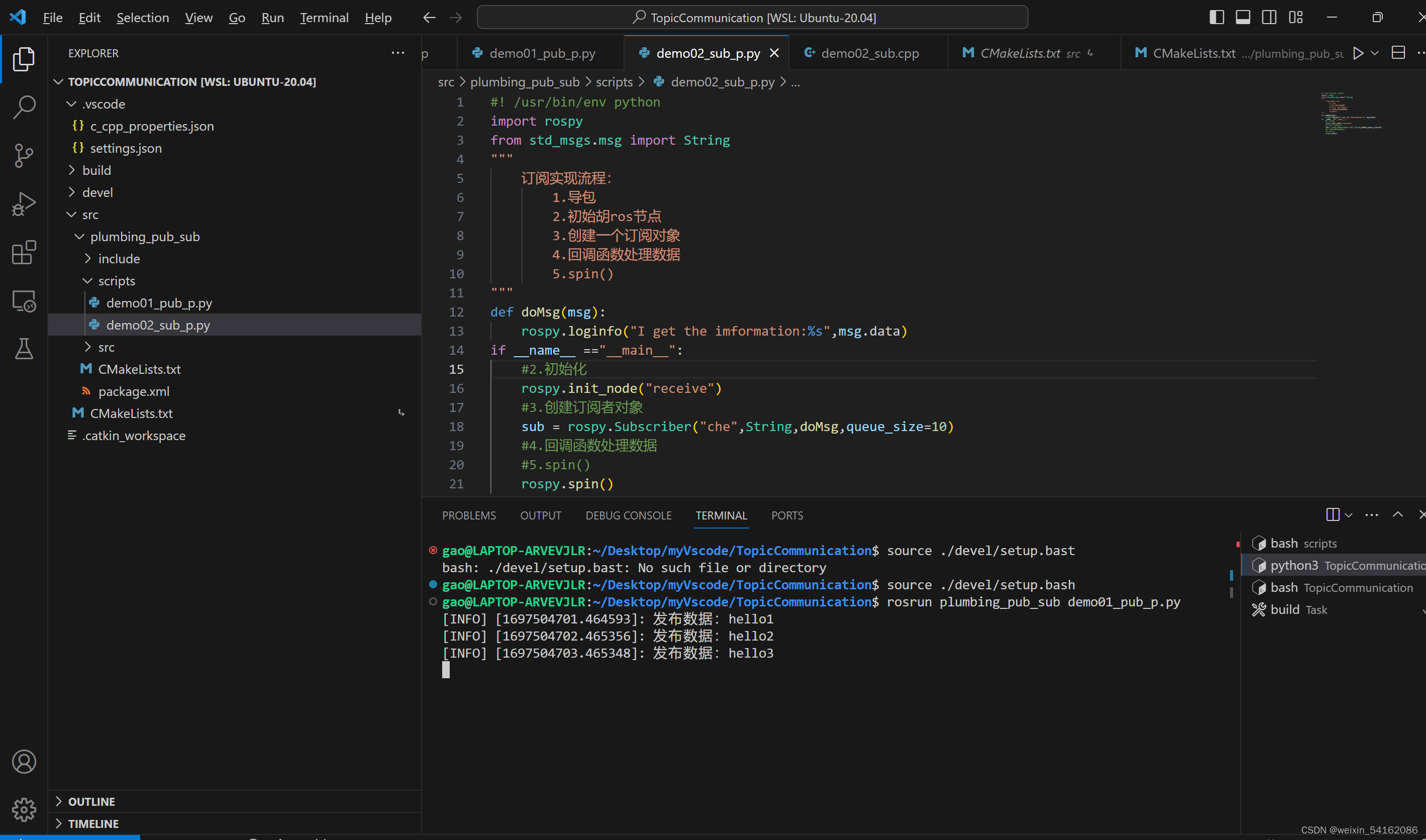
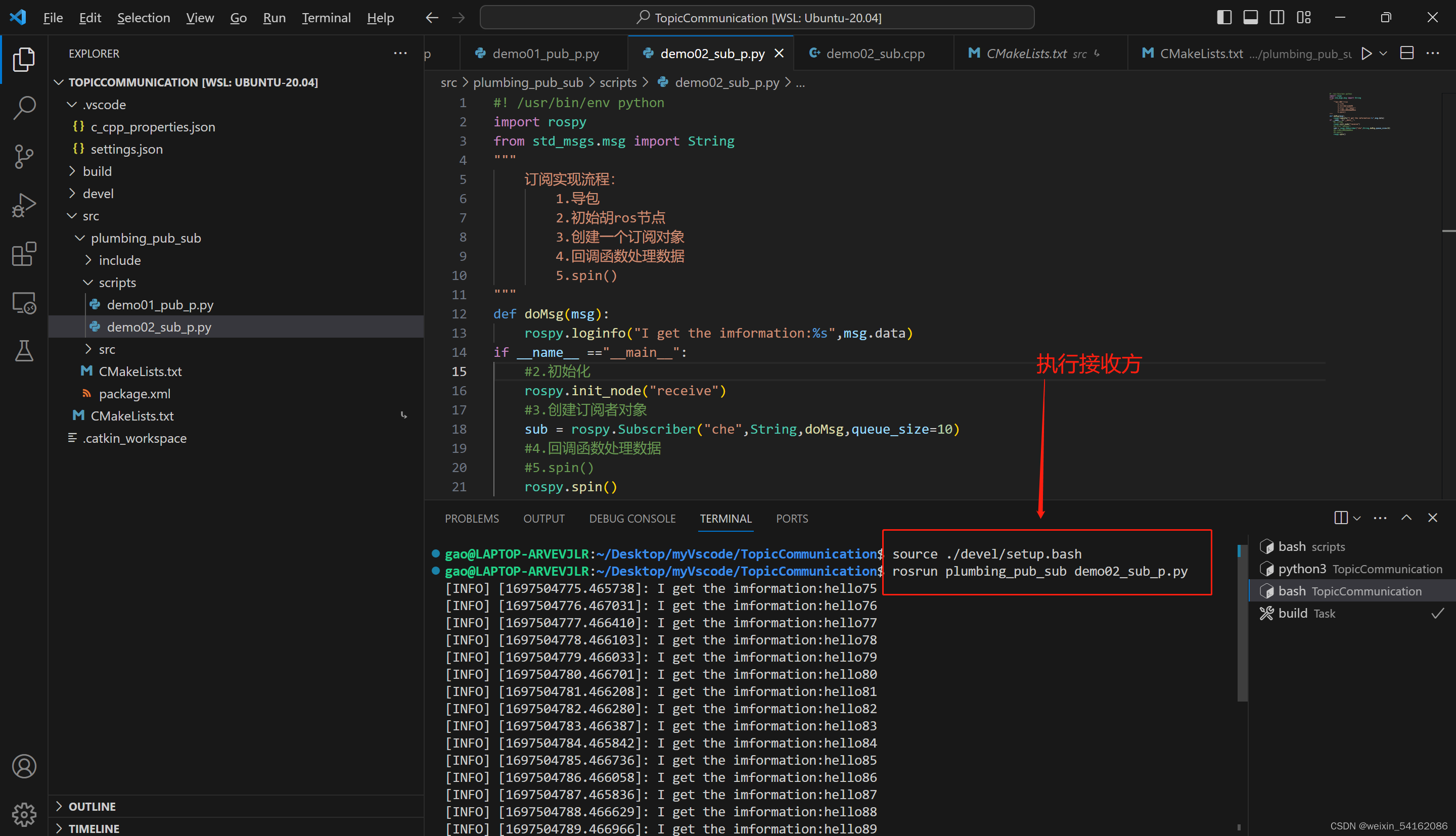
第二接收方

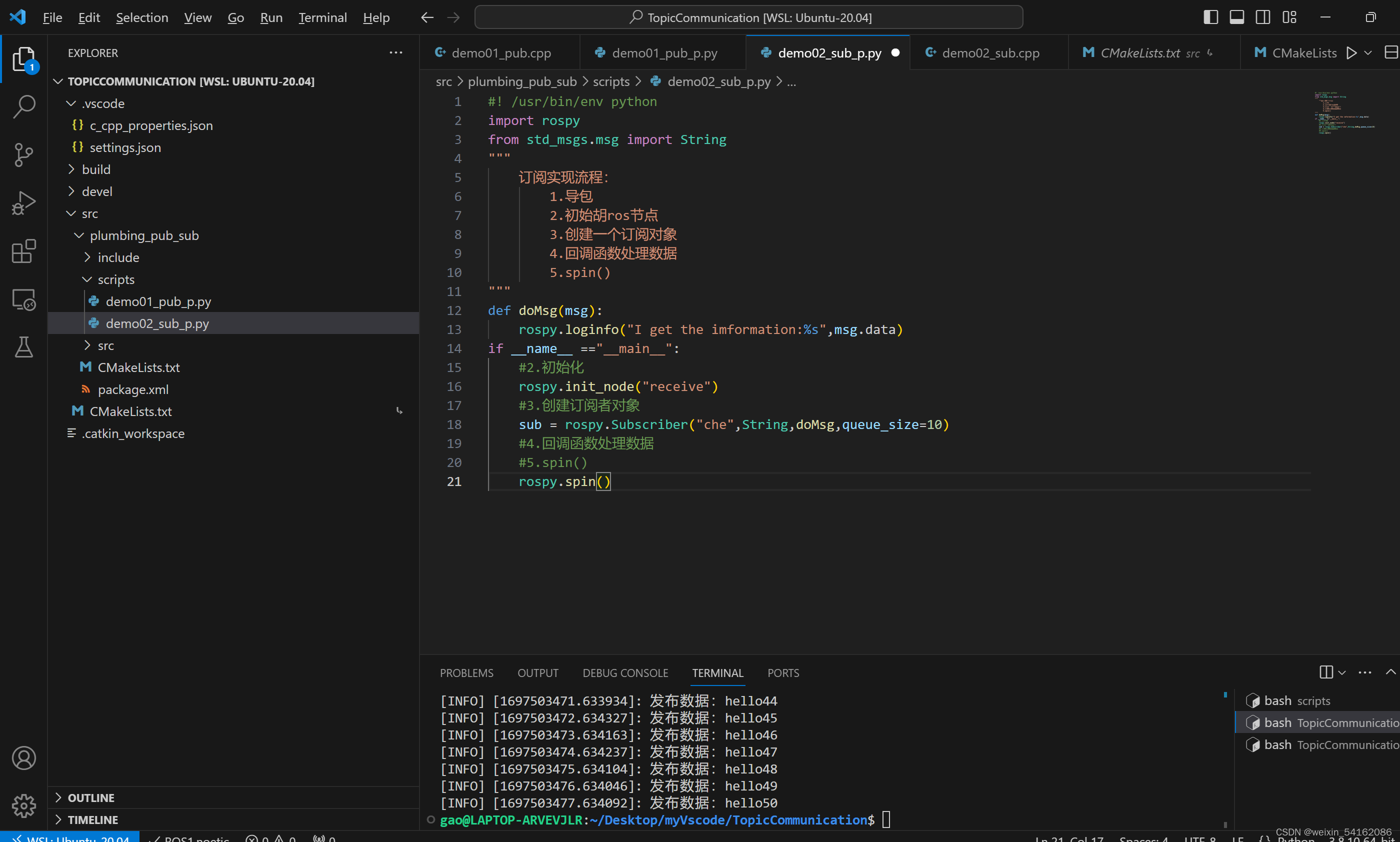
#! /usr/bin/env python
import rospy
from std_msgs.msg import String
"""
订阅实现流程:
1.导包
2.初始胡ros节点
3.创建一个订阅对象
4.回调函数处理数据
5.spin()
"""
def doMsg(msg):
rospy.loginfo("I get the imformation:%s",msg.data)
if __name__ =="__main__":
#2.初始化
rospy.init_node("receive")
#3.创建订阅者对象
sub = rospy.Subscriber("che",String,doMsg,queue_size=10)
#4.回调函数处理数据
#5.spin()
rospy.spin()
















 2720
2720











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









