







在公众号查看更多内容。
在KUKA机器人编程与调试中,经常会用到中断编程。通过中断实现机器人暂停,或者停止当前的动作进入中断后的程序中接着运行,以此来满足实际的调试要求。
1、中断的概念
①当出现诸如输入等定义的事件时,控制器中断当前程序,并处理一个定义的子程序。
②由中断而调用的子程序被称为中断程序。
③最多允许同时声明32 个中断。对于新系统进行了扩展,最多允许同时声明了 64 个中断。可随时用新的声明覆盖中断声明。
④中断程序不允许含有样条运动。
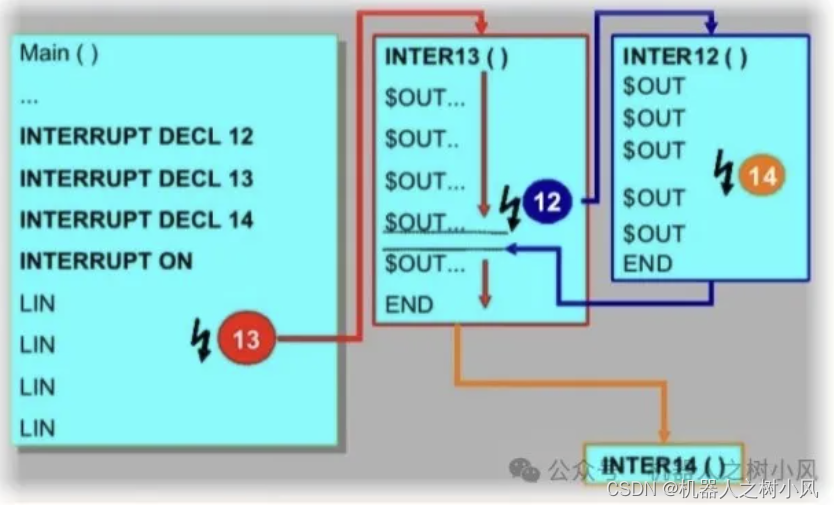
2、中断的优先级Prio
①中断有优先级 1、2、4 - 39 和 81 - 128 可供选择。
②优先级 3 和 40 - 80 是预留给系统应用的
③某些情况下中断 19 预留给制动测试
④如果多个中断同时出现,则先执行最高优先级的中断,然后再执行优先级低的中断。(1 = 最高优先级)
3、使用中断时的重要步骤
①中断声明;
②启动 / 关闭或禁止 / 开通中断;
③需要时停住机器人;
④需要时废弃当前的轨迹规划,运行一条新的轨迹。


















 5293
5293

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











