






在KUKA机器人的使用过程中,对于调试一个项目,当遇到特殊情况时需要暂停机器人,等异常情况处理完成后再继续机器人的程序运行。wait for指令是等待一个输入信号指令,没有输入信号,机器人一直等待。在一定程度上程序也不继续向下运行,机器人也处于停止的状态,但这只是在预定的流程中提前设想到的,并不能解决在整个工作过程中随时可能暂停的情况。对于这种情形,就可以通过中断编程来实现。
1、中断声明
实际调试中,通常需要对整个工作流程进行中断编程来实现暂停。所以就把中断声明的部分放在程序的开头,如以下的程序,把中断的声明部分放在循环工作流程的LOOP之上。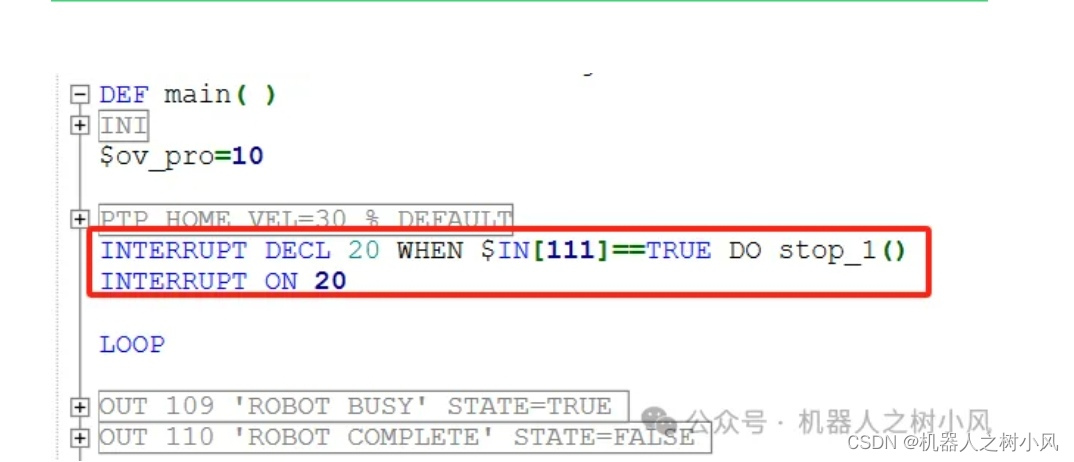
详细的合集教程,可以在公众号上查看。


















 5307
5307

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











