






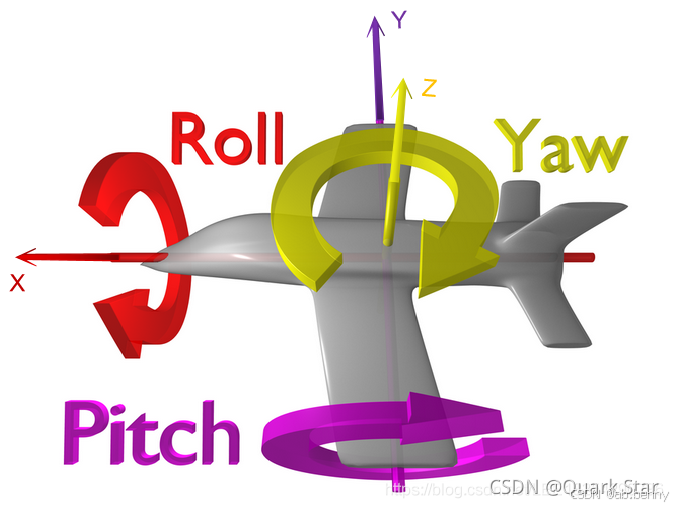
在飞机中,方位角、俯仰角和翻滚角是描述飞机姿态和方向的三个重要角度。它们分别对应于飞机在三维空间中的旋转运动,并有具体的定义和表示方法:
1. 方位角(Yaw)
- 描述:
方位角表示飞机绕垂直轴的旋转(左右方向的偏转),即飞机机头相对于地面方向的偏转角。 - 对应轴:
垂直轴(Z轴)。 - 物理表现:
当飞机左右转弯时(如偏向北、东、西、南等方向),方位角发生变化。 - 仪表表示:
在飞机上通过方向陀螺仪或航向指示器显示。以磁北为基准,方位角通常用度数(0°~360°)表示。
2. 俯仰角(Pitch)
- 描述:
俯仰角表示飞机绕横轴(翼尖到翼尖方向)的旋转,即飞机机头向上或向下的倾斜角度。 - 对应轴:
横轴(Y轴)。 - 物理表现:
当飞机抬头爬升或低头下降时,俯仰角发生变化。 - 仪表表示:
在飞机上通过**姿态指示器(人工地平仪)**显示。零点为水平飞行状态,正值表示机头上扬,负值表示机头下俯。
3. 翻滚角(Roll)
- 描述:
翻滚角表示飞机绕纵轴(机头到机尾方向)的旋转,即飞机左右倾斜的角度。 - 对应轴:
纵轴(X轴)。 - 物理表现:
当飞机执行左右倾斜或滚转动作(如侧倾转弯或做桶滚时),翻滚角发生变化。 - 仪表表示:
在飞机上通过**姿态指示器(人工地平仪)**显示。零点为机翼水平,正值表示右倾,负值表示左倾。
总结
在航空中,这三个角度描述了飞机的姿态和航向:
- 方位角(Yaw): 对应绕 Z 轴旋转,控制飞机的航向。
- 俯仰角(Pitch): 对应绕 Y 轴旋转,控制飞机的爬升或下降。
- 翻滚角(Roll):对应绕 X 轴旋转, 控制飞机的倾斜和滚转。
通常用姿态指示器和航向指示器等仪表配合,实时显示飞机的三维姿态,帮助飞行员调整和维持稳定飞行。

















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









