






今天分享的是人形机器人系列深度研究报告:《人形机器人行业报告:人形机器人的动力核心电机》。
(报告出品方:光大证券)
报告共计:35页
电机:人形机器人的动力核心
人形机器人各类驱动方式的比较
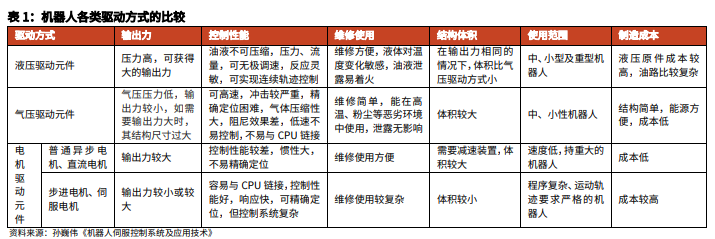
电机是人形机器人中动力的产生机构,可以类比做人的肌肉。机器人的驱动方式可以分为电动驱动、液压驱动、气压驱动;其中,电动驱动由于效率高、精确度高、成本低等优势,得以广泛应用。
空心杯电机和无框力矩电机适配机器人不同部位
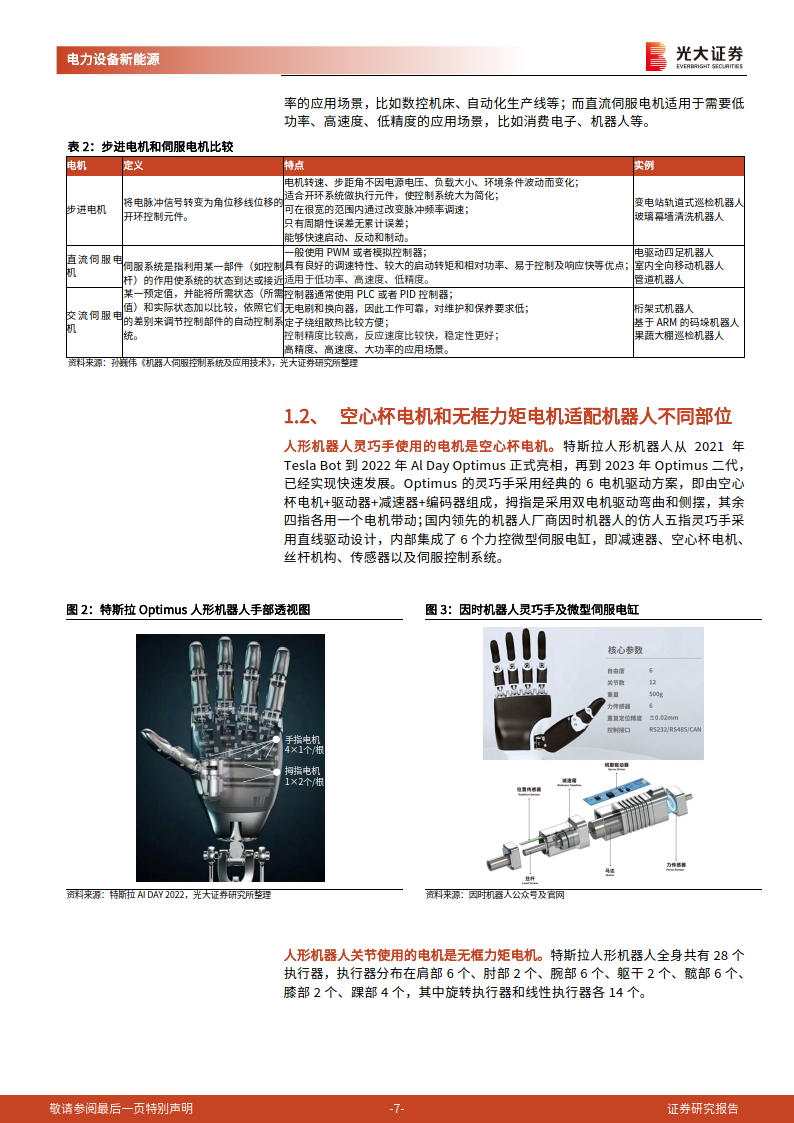
人形机器人灵巧手使用的电机是空心杯电机。特斯拉人形机器人从 2021 年 Tesla Bot 到 2022 年 Al Day Optimus 正式亮相,再到 2023 年 Optimus 二代, 已经实现快速发展。Optimus 的灵巧手采用经典的 6 电机驱动方案,即由空心 杯电机+驱动器+减速器+编码器组成,拇指是采用双电机驱动弯曲和侧摆,其余 四指各用一个电机带动;国内领先的机器人厂商因时机器人的仿人五指灵巧手采用直线驱动设计,内部集成了 6 个力控微型伺服电缸,即减速器、空心杯电机、 丝杆机构、传感器以及伺服控制系统。

人形机器人关节使用的电机是无框力矩电机。特斯拉人形机器人全身共有 28 个 执行器,执行器分布在肩部 6 个、肘部 2 个、腕部 6 个、躯干 2 个、髋部 6 个、 膝部 2 个、踝部 4 个,其中旋转执行器和线性执行器各 14 个。
空心杯电机:与灵巧手高度适配
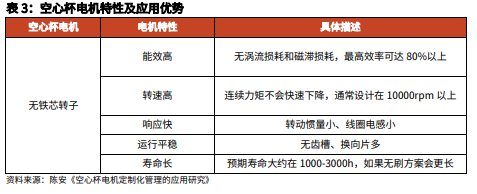
无铁芯结构,能效高、转速快、寿命长
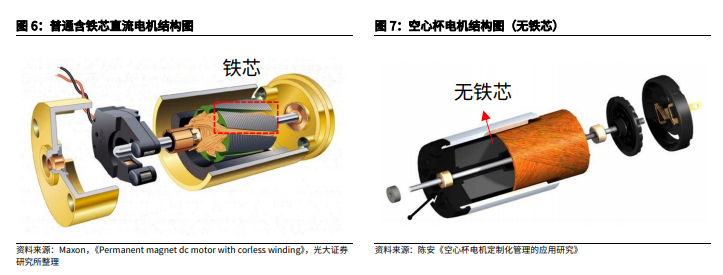
空心杯电机是一种微型伺服电动机,与灵巧手关节高度适配。它可以利用永磁铁 产生磁场,从而实现直流供电。与传统电机的不同之处在于,空心杯电机结构为转子无铁芯,表现为无铁心损耗、低摩擦和良好的散热性等特性,实现了电机的 高效率,是电池供电型设备的理想选择。空心杯电机通常应用于便携式空气采样 泵、仿人机器人、仿生手、手持电动工具等场景。
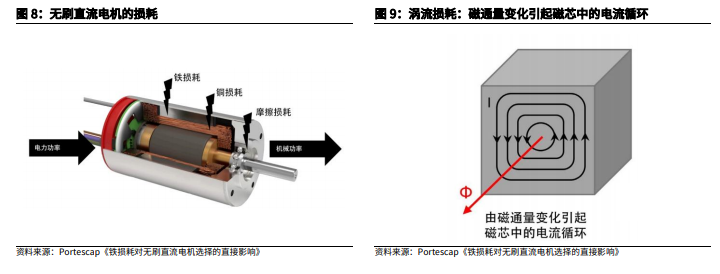
空心杯电机无铁芯设计表现为无涡流损耗和磁滞损耗。铁芯损耗一般由涡流损耗 和磁滞损耗组成,铁芯在电机运转中会产生感应电动势,进而产生感应电流,感应电流成涡流状,涡流损耗是电机损耗最大部分;磁滞损耗表现为磁化过程中有 一部分电磁能量不可逆转地转换为热能,铁磁体等在反复磁化过程中因磁滞现象 而消耗能量。
空心杯电机转子是杯状的自支撑线圈,可降低转子转动惯量,具有以下特点:不存在齿槽,没有齿槽转矩,因此噪声和振动小;换向片数量多,换向时的电流波动更小;物理气隙较大,电感较小,换向火花小,因此电磁兼容性能好。
空心杯电机分为有刷电机和无刷电机:有无电刷是有刷电机和无刷电机最直观的区别。电刷可将电能转换成机械能或将机械能转换成电能,无刷电机则是由电机 主体和驱动器组成的机电一体化产品。
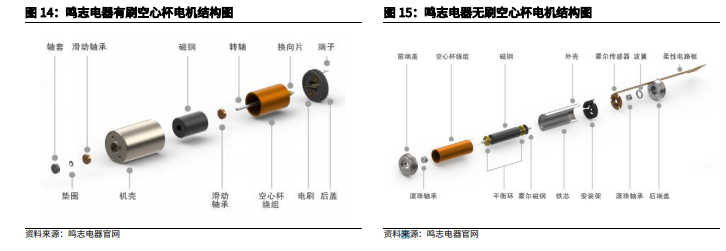
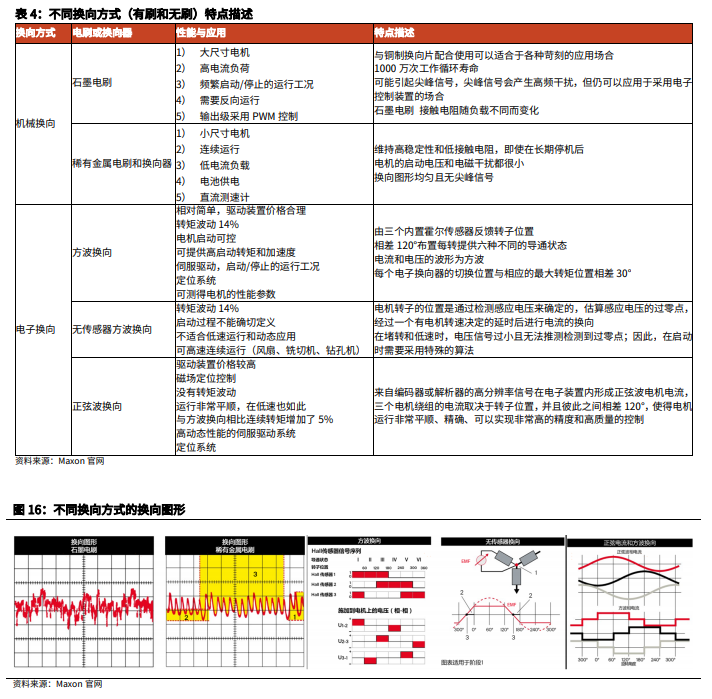
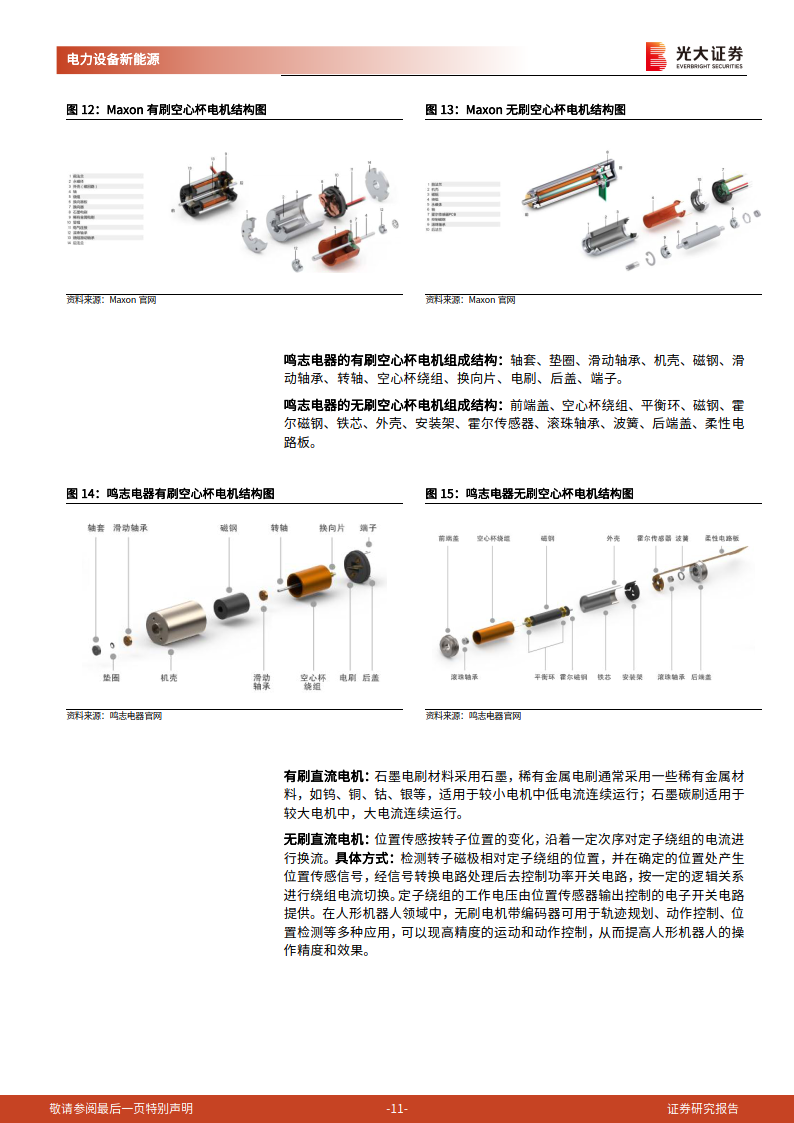
Maxon 和鸣志电器的有刷空心杯电机和无刷空心杯电机组成结构如下:
Maxon 的有刷空心杯电机组成结构:前法兰、永磁体、外壳、轴、换向器板、换向器、石墨电刷、稀有金属电刷、管帽、电气连接、滚柱轴承、烧结滑动轴承、后法兰。
Maxon 的无刷空心杯电机组成结构:前法兰、机壳、磁轨、绕组、永磁体、轴、霍尔传感器 PCB、控制磁钢、滚柱轴承、后法兰。

鸣志电器的有刷空心杯电机组成结构:轴套、垫圈、滑动轴承、机壳、磁钢、滑动轴承、转轴、空心杯绕组、换向片、电刷、后盖、端子。
鸣志电器的无刷空心杯电机组成结构:前端盖、空心杯绕组、平衡环、磁钢、霍尔磁钢、铁芯、外壳、安装架、霍尔传感器、滚珠轴承、波簧、后端盖、柔性电路板。
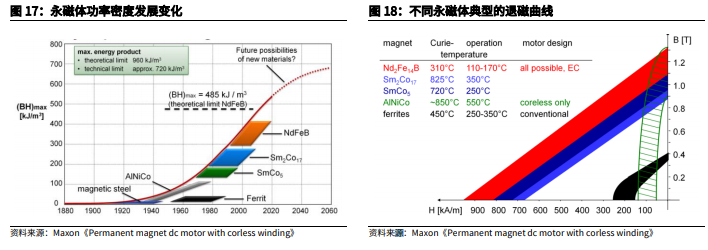
有刷直流电机:石墨电刷材料采用石墨,稀有金属电刷通常采用一些稀有金属材料,如钨、铜、钴、银等,适用于较小电机中低电流连续运行;石墨碳刷适用于较大电机中,大电流连续运行。
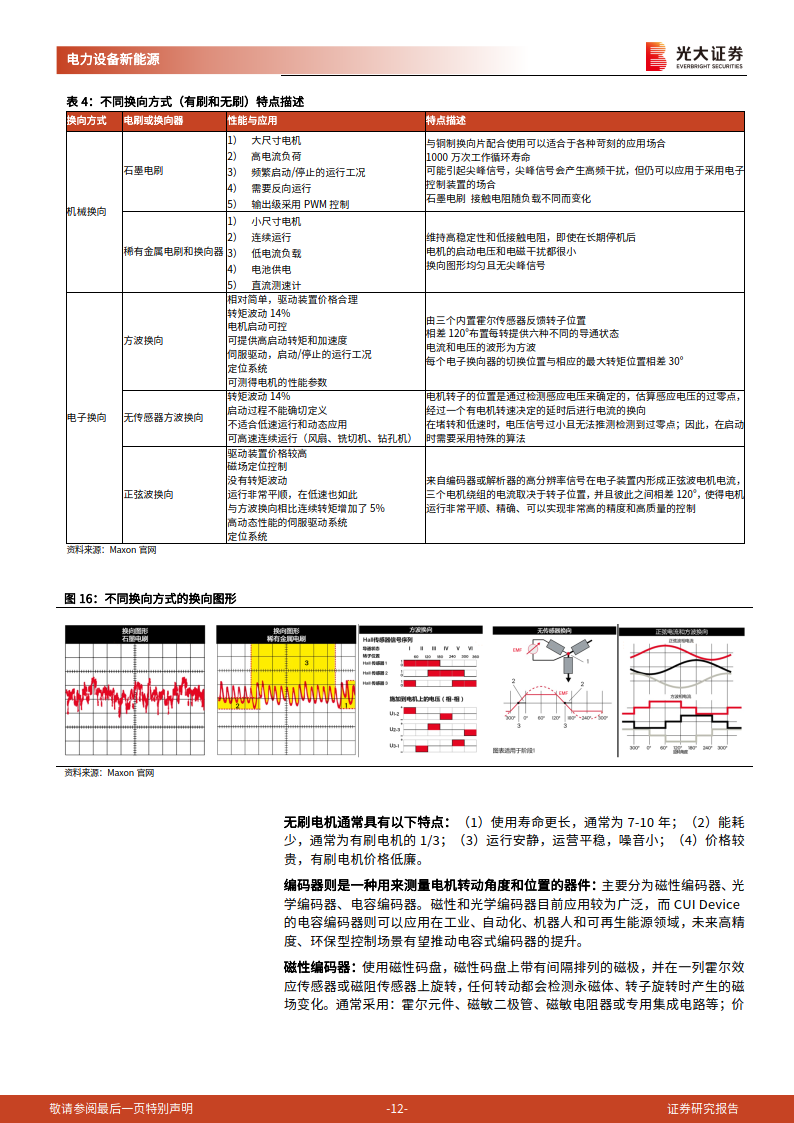
无刷直流电机:位置传感按转子位置的变化,沿着一定次序对定子绕组的电流进行换流。具体方式:检测转子磁极相对定子绕组的位置,并在确定的位置处产生位置传感信号,经信号转换电路处理后去控制功率开关电路,按一定的逻辑关系进行绕组电流切换。定子绕组的工作电压由位置传感器输出控制的电子开关电路提供。在人形机器人领域中,无刷电机带编码器可用于轨迹规划、动作控制、位置检测等多种应用,可以现高精度的运动和动作控制,从而提高人形机器人的操作精度和效果。
无刷电机通常具有以下特点:(1)使用寿命更长,通常为7-10年;(2)能耗少,通常为有刷电机的 1/3;(3)运行安静,运营平稳,噪音小;(4)价格较贵,有刷电机价格低廉。
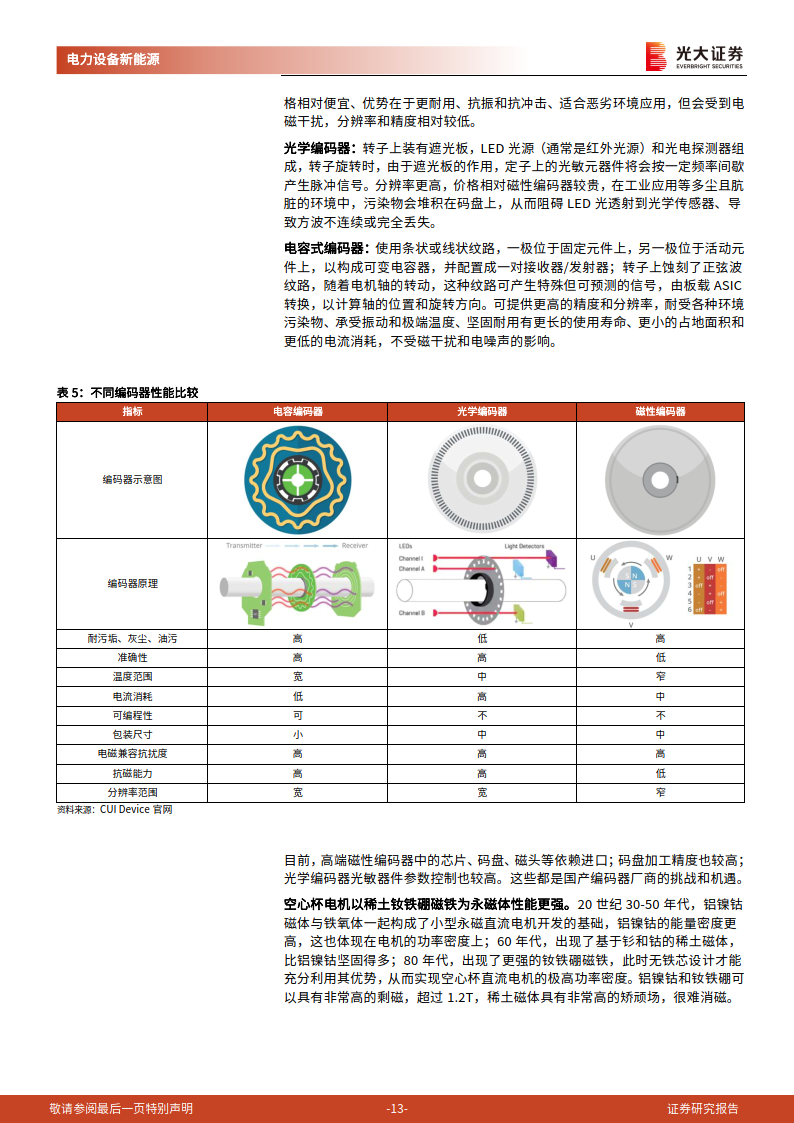
编码器则是一种用来测量电机转动角度和位置的器件:主要分为磁性编码器、光学编码器、电容编码器。磁性和光学编码器目前应用较为广泛,而 CUl Device的电容编码器则可以应用在工业、自动化、机器人和可再生能源领域,未来高精度、环保型控制场景有望推动电容式编码器的提升。
磁性编码器:使用磁性码盘,磁性码盘上带有间隔排列的磁极,并在一列霍尔效应传感器或磁阻传感器上旋转,任何转动都会检测永磁体、转子旋转时产生的磁场变化。通常采用:霍尔元件、磁敏二极管、磁敏电阻器或专用集成电路等,价格相对便宜、优势在于更耐用、抗振和抗冲击、适合恶劣环境应用,但会受到电磁干扰,分辨率和精度相对较低。
光学编码器:转子上装有遮光板,LED 光源(通常是红外光源)和光电探测器组成,转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇产生脉冲信号。分辨率更高,价格相对磁性编码器较贵,在工业应用等多尘且肮脏的环境中,污染物会堆积在码盘上,从而阻碍LED光透射到光学传感器、导致方波不连续或完全丢失。
电容式编码器:使用条状或线状纹路,一极位于固定元件上,另一极位于活动元件上,以构成可变电容器,并配置成一对接收器/发射器,转子上蚀刻了正弦波纹路,随着电机轴的转动,这种纹路可产生特殊但可预测的信号,由板载 ASIC转换,以计算轴的位置和旋转方向。可提供更高的精度和分辨率,耐受各种环境污染物、承受振动和极端温度、坚固耐用有更长的使用寿命、更小的占地面积和更低的电流消耗,不受磁干扰和电噪声的影响。
目前,高端磁性编码器中的芯片、码盘、磁头等依赖进口;码盘加工精度也较高;光学编码器光敏器件参数控制也较高。这些都是国产编码器厂商的挑战和机遇。
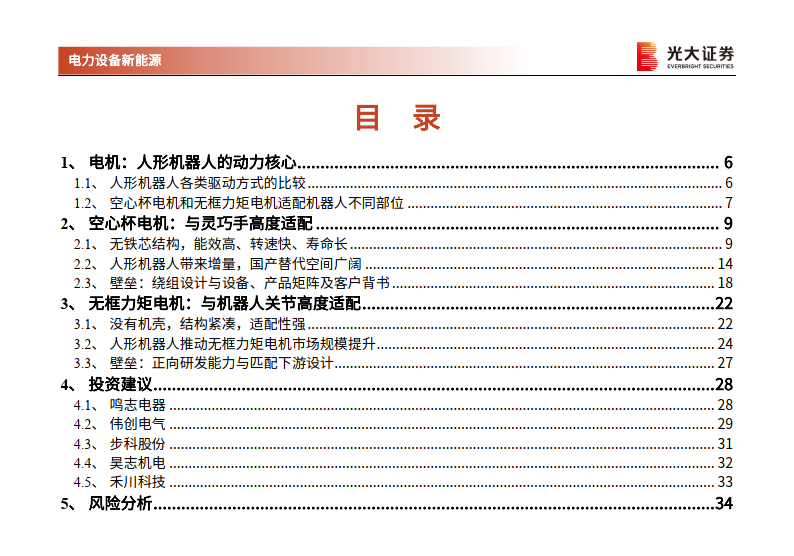
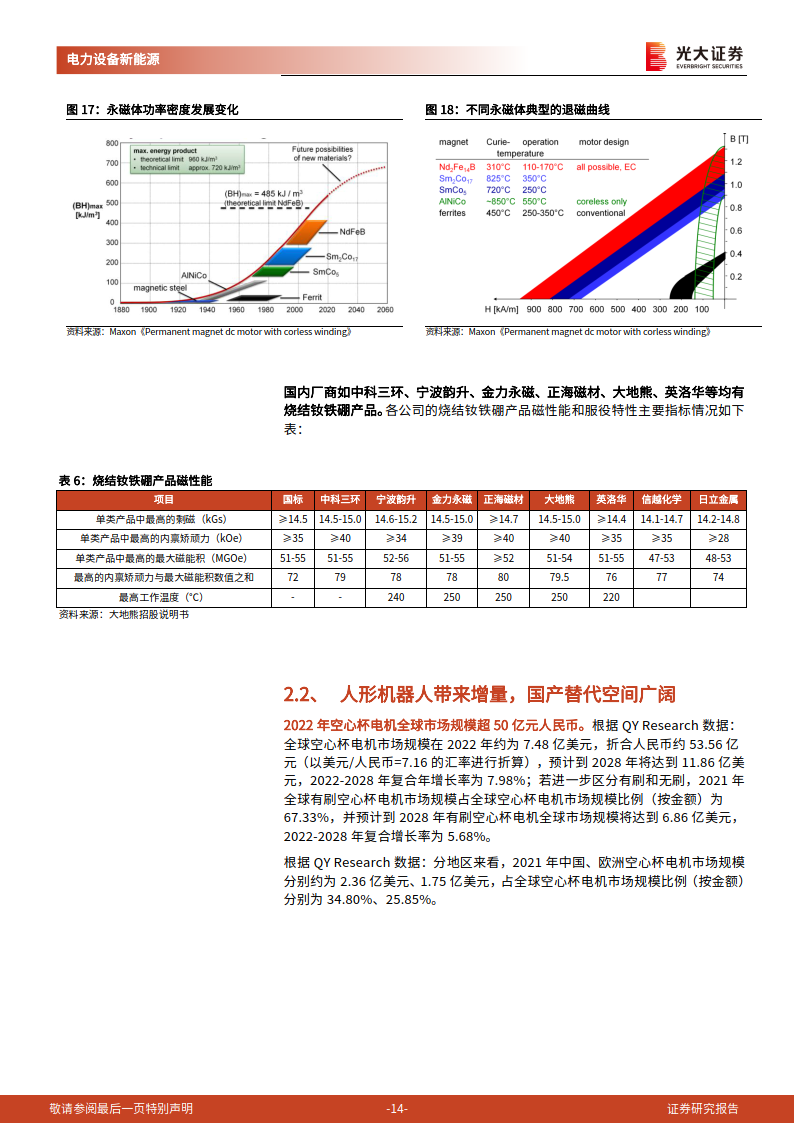
空心杯电机以稀土钕铁硼磁铁为永磁体性能更强。20世纪30-50年代,铝镍钴磁体与铁氧体一起构成了小型永磁直流电机开发的基础,铝镍钴的能量密度更高,这也体现在电机的功率密度上;60年代,出现了基于钐和钴的稀土磁体,比铝镍钴坚固得多;80年代,出现了更强的钕铁硼磁铁,此时无铁芯设计才能充分利用其优势,从而实现空心杯直流电机的极高功率密度。铝镍钴和钕铁硼可以具有非常高的剩磁,超过 1.2T,稀土磁体具有非常高的矫顽场,很难消磁。





报告共计:35页














 1102
1102











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









