







class LiftSplatShoot(nn.Module):
def __init__(self, grid_conf, data_aug_conf, outC):
super(LiftSplatShoot, self).__init__()
self.grid_conf = grid_conf # 保存网格配置
self.data_aug_conf = data_aug_conf # 保存数据增强配置
dx, bx, nx = gen_dx_bx(self.grid_conf['xbound'],
self.grid_conf['ybound'],
self.grid_conf['zbound'],
) # 生成网格单元大小、网格原点和网格大小
self.dx = nn.Parameter(dx, requires_grad=False) # 将dx转为不可训练参数
self.bx = nn.Parameter(bx, requires_grad=False) # 将bx转为不可训练参数
self.nx = nn.Parameter(nx, requires_grad=False) # 将nx转为不可训练参数
self.downsample = 16 # 下采样因子
self.camC = 64 # 相机特征通道数
self.frustum = self.create_frustum() # 创建视锥体
self.D, _, _, _ = self.frustum.shape # 获取视锥体的深度维度
self.camencode = CamEncode(self.D, self.camC, self.downsample) # 创建相机编码模块
self.bevencode = BevEncode(inC=self.camC, outC=outC) # 创建鸟瞰图编码模块
def create_frustum(self):
ogfH, ogfW = self.data_aug_conf['final_dim'] # 获取数据增强后的图像尺寸
fH, fW = ogfH // self.downsample, ogfW // self.downsample # 计算下采样后的图像尺寸
ds = torch.arange(*self.grid_conf['dbound'], dtype=torch.float).view(-1, 1, 1).expand(-1, fH, fW) # 生成深度维度的张量
D, _, _ = ds.shape # 获取深度维度的大小
xs = torch.linspace(0, ogfW - 1, fW, dtype=torch.float).view(1, 1, fW).expand(D, fH, fW) # 生成x方向的网格
ys = torch.linspace(0, ogfH - 1, fH, dtype=torch.float).view(1, fH, 1).expand(D, fH, fW) # 生成y方向的网格
frustum = torch.stack((xs, ys, ds), -1) # 堆叠x, y, z坐标,形成视锥体
return nn.Parameter(frustum, requires_grad=False) # 返回不可训练的视锥体参数
def get_geometry(self, rots, trans, intrins, post_rots, post_trans):
B, N, _ = trans.shape # 获取批量大小和相机数量
points = self.frustum - post_trans.view(B, N, 1, 1, 1, 3) # 减去数据增强后的平移
points = torch.inverse(post_rots).view(B, N, 1, 1, 1, 3, 3).matmul(points.unsqueeze(-1)) # 应用逆旋转矩阵
points = torch.cat((points[:, :, :, :, :, :2] * points[:, :, :, :, :, 2:3],
points[:, :, :, :, :, 2:3]
), 5) # 反归一化,恢复图像坐标
combine = rots.matmul(torch.inverse(intrins)) # 组合旋转和逆内参矩阵
points = combine.view(B, N, 1, 1, 1, 3, 3).matmul(points).squeeze(-1) # 应用组合矩阵
points += trans.view(B, N, 1, 1, 1, 3) # 加上平移向量
return points # 返回几何点坐标
def get_cam_feats(self, x):
B, N, C, imH, imW = x.shape # 获取输入图像的形状
x = x.view(B*N, C, imH, imW) # 重塑为(batch_size * num_cameras, channels, height, width)
x = self.camencode(x) # 编码相机特征
x = x.view(B, N, self.camC, self.D, imH//self.downsample, imW//self.downsample) # 重塑为(batch_size, num_cameras, camC, depth, height//downsample, width//downsample)
x = x.permute(0, 1, 3, 4, 5, 2) # 重新排列维度为(batch_size, num_cameras, depth, height//downsample, width//downsample, camC)
return x # 返回相机特征
def voxel_pooling(self, geom_feats, x):
B, N, D, H, W, C = x.shape # 获取x的形状
Nprime = B*N*D*H*W # 计算展平后的大小
x = x.reshape(Nprime, C) # 展平成(Nprime, C)
geom_feats = ((geom_feats - (self.bx - self.dx/2.)) / self.dx).long() # 将几何特征归一化并转为整数索引
geom_feats = geom_feats.view(Nprime, 3) # 重塑为(Nprime, 3)
batch_ix = torch.cat([torch.full([Nprime//B, 1], ix,
device=x.device, dtype=torch.long) for ix in range(B)]) # 创建批次索引
geom_feats = torch.cat((geom_feats, batch_ix), 1) # 组合几何特征和批次索引
kept = (geom_feats[:, 0] >= 0) & (geom_feats[:, 0] < self.nx[0])\
& (geom_feats[:, 1] >= 0) & (geom_feats[:, 1] < self.nx[1])\
& (geom_feats[:, 2] >= 0) & (geom_feats[:, 2] < self.nx[2]) # 过滤掉超出范围的点
x = x[kept] # 保留有效的x
geom_feats = geom_feats[kept] # 保留有效的几何特征
ranks = geom_feats[:, 0] * (self.nx[1] * self.nx[2] * B)\
+ geom_feats[:, 1] * (self.nx[2] * B)\
+ geom_feats[:, 2] * B\
+ geom_feats[:, 3] # 计算每个点的排名
sorts = ranks.argsort() # 对排名排序
x, geom_feats, ranks = x[sorts], geom_feats[sorts], ranks[sorts] # 按排序结果重新排列
x, geom_feats = cumsum_trick(x, geom_feats, ranks) # 累积和技巧
final = torch.zeros((B, C, self.nx[2], self.nx[0], self.nx[1]), device=x.device) # 创建结果张量
final[geom_feats[:, 3], :, geom_feats[:, 2], geom_feats[:, 0], geom_feats[:, 1]] = x # 填充结果张量
final = torch.cat(final.unbind(dim=2), 1) # 合并Z维度
return final # 返回最终结果
def get_voxels(self, x, rots, trans, intrins, post_rots, post_trans):
geom = self.get_geometry(rots, trans, intrins, post_rots, post_trans) # 获取几何信息
x = self.get_cam_feats(x) # 获取相机特征
x = self.voxel_pooling(geom, x) # 进行体素池化
return x # 返回体素特征
def forward(self, x, rots, trans, intrins, post_rots, post_trans):
x = self.get_voxels(x, rots, trans, intrins, post_rots, post_trans) # 获取体素特征
x = self.bevencode(x) # 进行鸟瞰图编码
return x # 返回最终输出
def __init__(self, grid_conf, data_aug_conf, outC):
super(LiftSplatShoot, self).__init__()
self.grid_conf = grid_conf # 保存网格配置
self.data_aug_conf = data_aug_conf # 保存数据增强配置
dx, bx, nx = gen_dx_bx(self.grid_conf['xbound'],
self.grid_conf['ybound'],
self.grid_conf['zbound'],
) # 生成网格单元大小、网格原点和网格大小
self.dx = nn.Parameter(dx, requires_grad=False) # 将dx转为不可训练参数
self.bx = nn.Parameter(bx, requires_grad=False) # 将bx转为不可训练参数
self.nx = nn.Parameter(nx, requires_grad=False) # 将nx转为不可训练参数
self.downsample = 16 # 下采样因子
self.camC = 64 # 相机特征通道数
self.frustum = self.create_frustum() # 创建视锥体
self.D, _, _, _ = self.frustum.shape # 获取视锥体的深度维度
self.camencode = CamEncode(self.D, self.camC, self.downsample) # 创建相机编码模块
self.bevencode = BevEncode(inC=self.camC, outC=outC) # 创建鸟瞰图编码模块
gen_dx_bx:函数用于生成网格参数。
self.downsample:是图像下采样因子,用于减少计算复杂度。
self.camC:是相机特征通道数。
self.frustum:是由create_frustum方法创建的视锥体。
CamEncode和BevEncode是两个特征编码模块
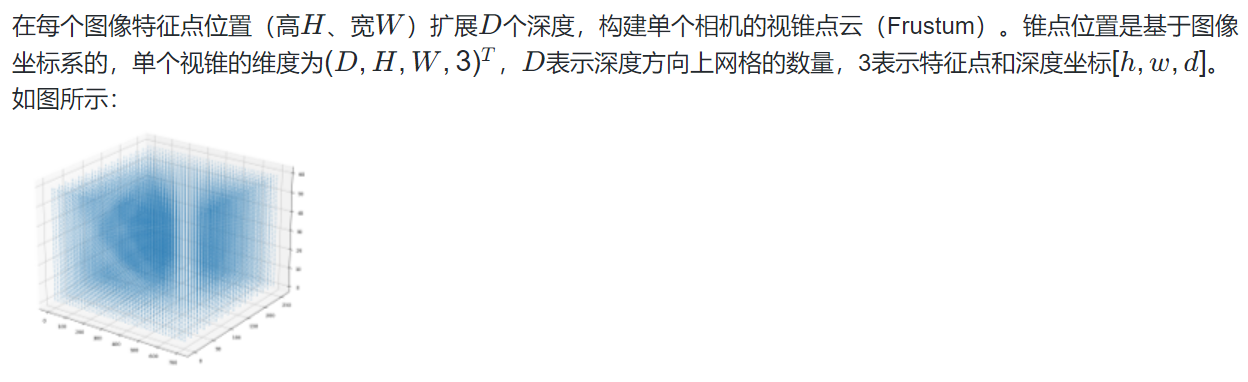
创建视锥体网格
用于将图像平面的坐标映射到3D空间中。
def create_frustum(self):
ogfH, ogfW = self.data_aug_conf['final_dim'] # 获取数据增强后的图像尺寸
fH, fW = ogfH // self.downsample, ogfW // self.downsample # 计算下采样后的图像尺寸
ds = torch.arange(*self.grid_conf['dbound'], dtype=torch.float).view(-1, 1, 1).expand(-1, fH, fW) # 生成深度维度的张量
D, _, _ = ds.shape # 获取深度维度的大小
xs = torch.linspace(0, ogfW - 1, fW, dtype=torch.float).view(1, 1, fW).expand(D, fH, fW) # 生成x方向的网格
ys = torch.linspace(0, ogfH - 1, fH, dtype=torch.float).view(1, fH, 1).expand(D, fH, fW) # 生成y方向的网格
frustum = torch.stack((xs, ys, ds), -1) # 堆叠x, y, z坐标,形成视锥体
return nn.Parameter(frustum, requires_grad=False) # 返回不可训练的视锥体参数
根据输入参数计算点云在车辆坐标系中的位置。
def get_geometry(self, rots, trans, intrins, post_rots, post_trans):
B, N, _ = trans.shape # 获取批量大小和相机数量
# 抵消数据增强及预处理对像素的变化
points = self.frustum - post_trans.view(B, N, 1, 1, 1, 3) # 减去数据增强后的平移
points = torch.inverse(post_rots).view(B, N, 1, 1, 1, 3, 3).matmul(points.unsqueeze(-1)) # 应用逆旋转矩阵
points = torch.cat((points[:, :, :, :, :, :2] * points[:, :, :, :, :, 2:3],
points[:, :, :, :, :, 2:3]
), 5) # 反归一化,恢复图像坐标
combine = rots.matmul(torch.inverse(intrins)) # 组合旋转和逆内参矩阵
points = combine.view(B, N, 1, 1, 1, 3, 3).matmul(points).squeeze(-1) # 应用组合矩阵
points += trans.view(B, N, 1, 1, 1, 3) # 加上平移向量
抵消数据增强及预处理对像素的变化公式:

图像坐标系 -> 归一化相机坐标系 -> 相机坐标系 -> 车身坐标系

得到

def voxel_pooling(self, geom_feats, x):
B, N, D, H, W, C = x.shape # 获取x的形状
Nprime = B*N*D*H*W # 计算展平后的大小
x = x.reshape(Nprime, C) # 展平成(Nprime, C)
geom_feats = ((geom_feats - (self.bx - self.dx/2.)) / self.dx).long() # 将几何特征归一化并转为整数索引
geom_feats = geom_feats.view(Nprime, 3) # 重塑为(Nprime, 3)
batch_ix = torch.cat([torch.full([Nprime//B, 1], ix,
device=x.device, dtype=torch.long) for ix in range(B)]) # 创建批次索引
geom_feats = torch.cat((geom_feats, batch_ix), 1) # 组合几何特征和批次索引
kept = (geom_feats[:, 0] >= 0) & (geom_feats[:, 0] < self.nx[0])\
& (geom_feats[:, 1] >= 0) & (geom_feats[:, 1] < self.nx[1])\
& (geom_feats[:, 2] >= 0) & (geom_feats[:, 2] < self.nx[2]) # 过滤掉超出范围的点
x = x[kept] # 保留有效的x
geom_feats = geom_feats[kept] # 保留有效的几何特征
ranks = geom_feats[:, 0] * (self.nx[1] * self.nx[2] * B)\
+ geom_feats[:, 1] * (self.nx[2] * B)\
+ geom_feats[:, 2] * B\
+ geom_feats[:, 3] # 计算每个点的排名
sorts = ranks.argsort() # 对排名排序
x, geom_feats, ranks = x[sorts], geom_feats[sorts], ranks[sorts] # 按排序结果重新排列
x, geom_feats = cumsum_trick(x, geom_feats, ranks) # 累积和技巧
final = torch.zeros((B, C, self.nx[2], self.nx[0], self.nx[1]), device=x.device) # 创建结果张量
final[geom_feats[:, 3], :, geom_feats[:, 2], geom_feats[:, 0], geom_feats[:, 1]] = x # 填充结果张量
final = torch.cat(final.unbind(dim=2), 1) # 合并Z维度
return final # 返回最终结果
def get_voxels(self, x, rots, trans, intrins, post_rots, post_trans):
geom = self.get_geometry(rots, trans, intrins, post_rots, post_trans) # 获取几何信息
x = self.get_cam_feats(x) # 获取相机特征
x = self.voxel_pooling(geom, x) # 进行体素池化
return x # 返回体素特征
def forward(self, x, rots, trans, intrins, post_rots, post_trans):
x = self.get_voxels(x, rots, trans, intrins, post_rots, post_trans) # 获取体素特征
x = self.bevencode(x) # 进行鸟瞰图编码
return x # 返回最终输出
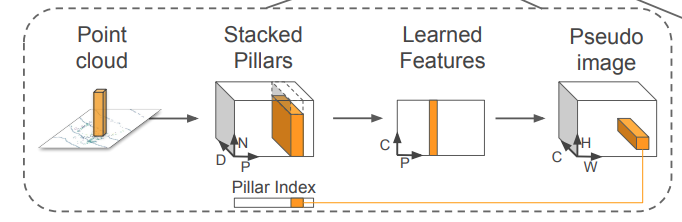
跟pointpillar的效果一样
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









