







周一
首先回顾复习RobotStudio的基础操作知识,练习工作站。【链接为B站学习视频】https://www.bilibili.com/video/BV1xp4y1e7TM?p=17&vd_source=896c136a0a3bccc4b198f05c6fe89d07
根据如图工作站教程复习并熟练基本指令
认识学校实验室实验台,装配实验台模型。参考资料工业机器人系统运用说明书。
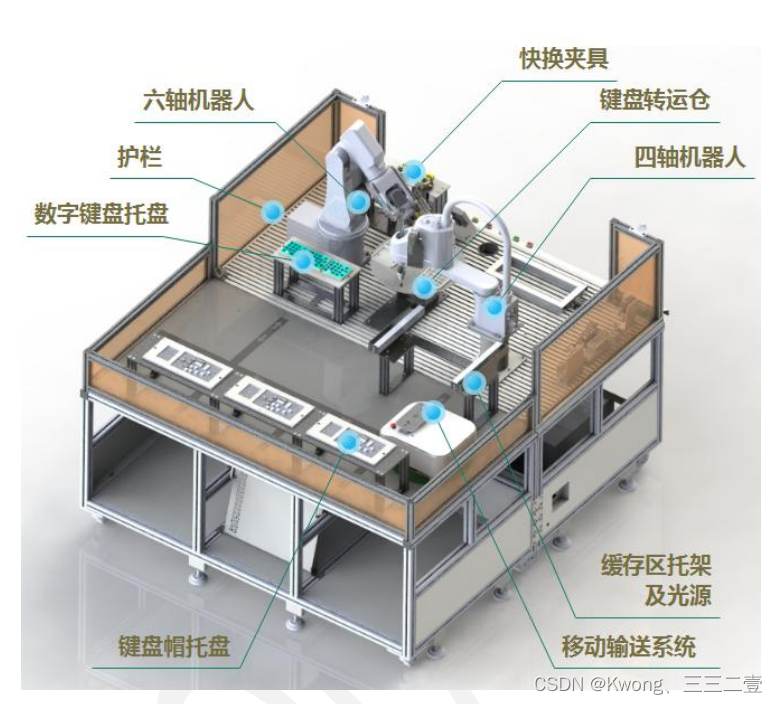
去实验室量取了实验台上各部件的位置,我的题目是七巧板。看着说明书,把通用的.step模型分别导进robotstudio。在SW里面调整模型,画缺少的部件。导入ABB机器人,从布局系统。
问题一:把.step模型导进sw的时候,显示模板无效。
解决办法:(18条消息) SolidWorks打开step.文件显示模板无效的解决办法_TitaHh的博客-CSDN博客_solidworks打不开step文件
问题二:把模型拉进sw后,零件名字变成了一堆横线和乱码。
解决办法:把√去掉
问题三:在robotstudio中,支架等模型比实验台比例大了接近好多倍。
解决办法:sw进行模型缩小比例SolidWorks模型如何等比例放大缩小? - SolidWorks经验技巧 - 溪风博客SolidWorks自学网站 (xifengboke.com)
注意细心点, 我是创建一个零件图,导进模型,在“特征”右键,选择“选项卡”,勾选模具工具。就显示“比例缩放”了。选中所有特征,比例因子<1就是缩小,>1就是放大。这时遇到了问题四。缩小了1000倍。导出.sat格式。
问题四:选重心缩放的时候,各部件散架了。
解决办法:选原点为参考系。
周一晚安,明天加油。
周二
今天把台子装好了。
问题一:装配图要缩小怎么缩小?之前是在零件图打开生成派生零件缩小的。
解决方法:
问题二:怎么做气泵夹具
解决办法:课本中创建工具
问题三:怎么创建动态夹具
(18条消息) RobotStudio动态夹具的创建_Half_A的博客-CSDN博客_robotstudio夹具制作
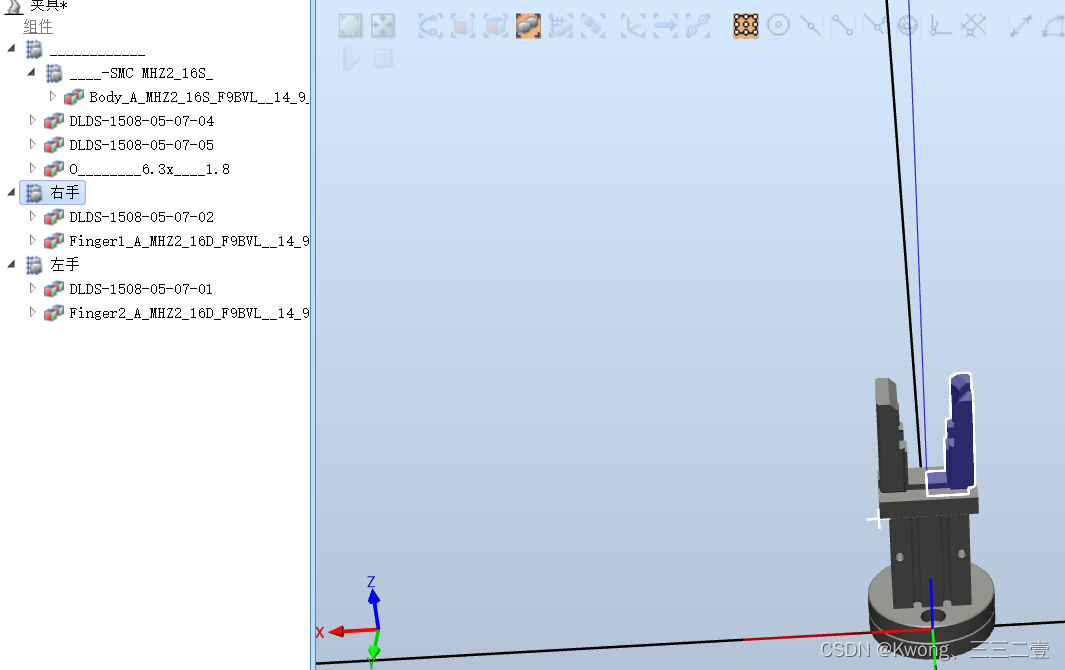
注意,左右的手指等要动的部件单独移出一个部件 。
周三
白天上课把台子搭好了,做了变位机转盘,还没配信号。就差动态夹具和给IO信号了。 晚上把动态夹具做好了。设计逻辑图如下:

最后记得把工作站逻辑的DI信号“jiaju”设定好,让system的DO信号连接到smart的DI信号“jiaju”。
之后的smart同理。
问题一:转盘变位机怎么创建设置?给一个信号就能控制变位机转动。
解决办法: 在RobotStudio中如何创建并控制变位机?_设定
问题二:变位机的旋转中心不对。
解决办法:没设置准确旋转中心的位置,然后重新定义姿态。pos1先应用后跳转pos2点确定
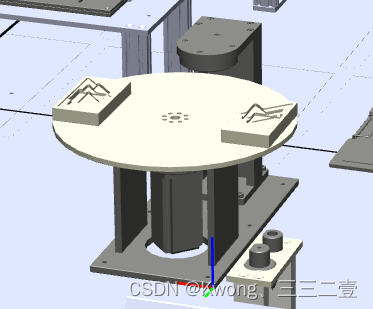
问题三:项目任务是通过相机识别需要的七巧板,拾取到转盘上,然后转180°,仿真练习时,我就把需要的七巧板提前放在转盘上,可是有两块大三角形,要放在两个七巧板托盘里,所以要旋转一次,所以变位机的机械姿态信号要弄好,让它旋转一次。
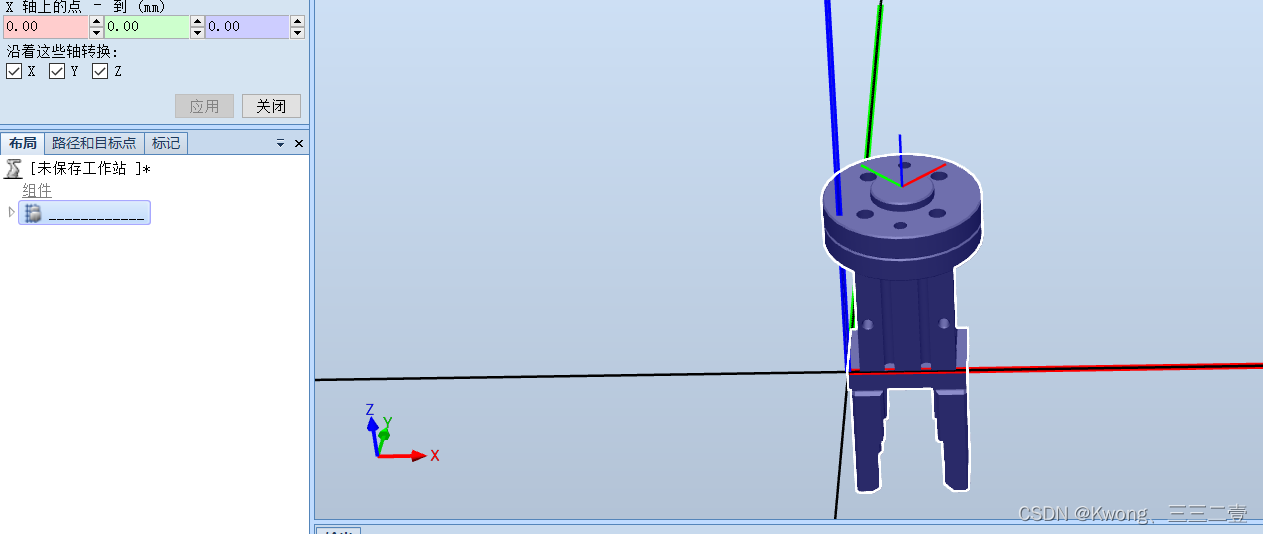
问题四:夹具对准X,Y,Z坐标轴怎么设置?
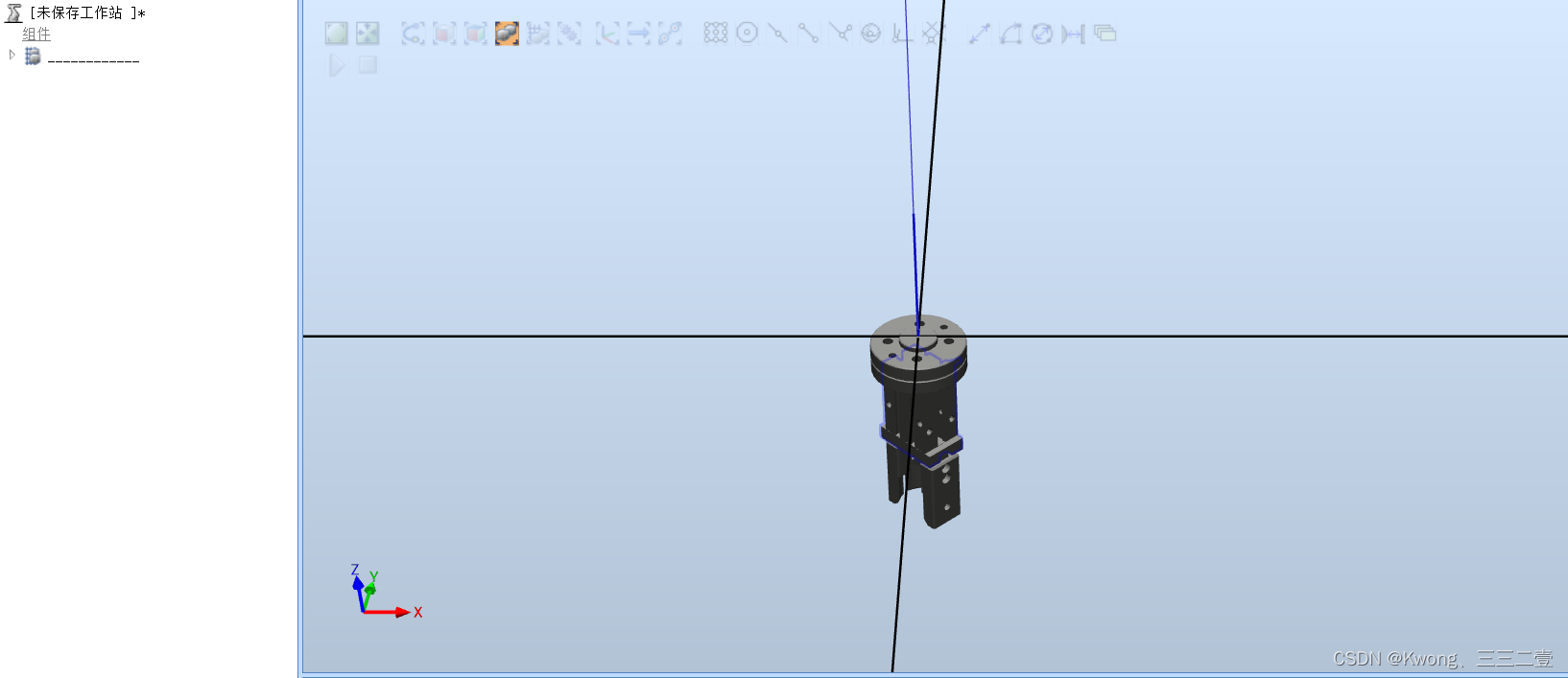
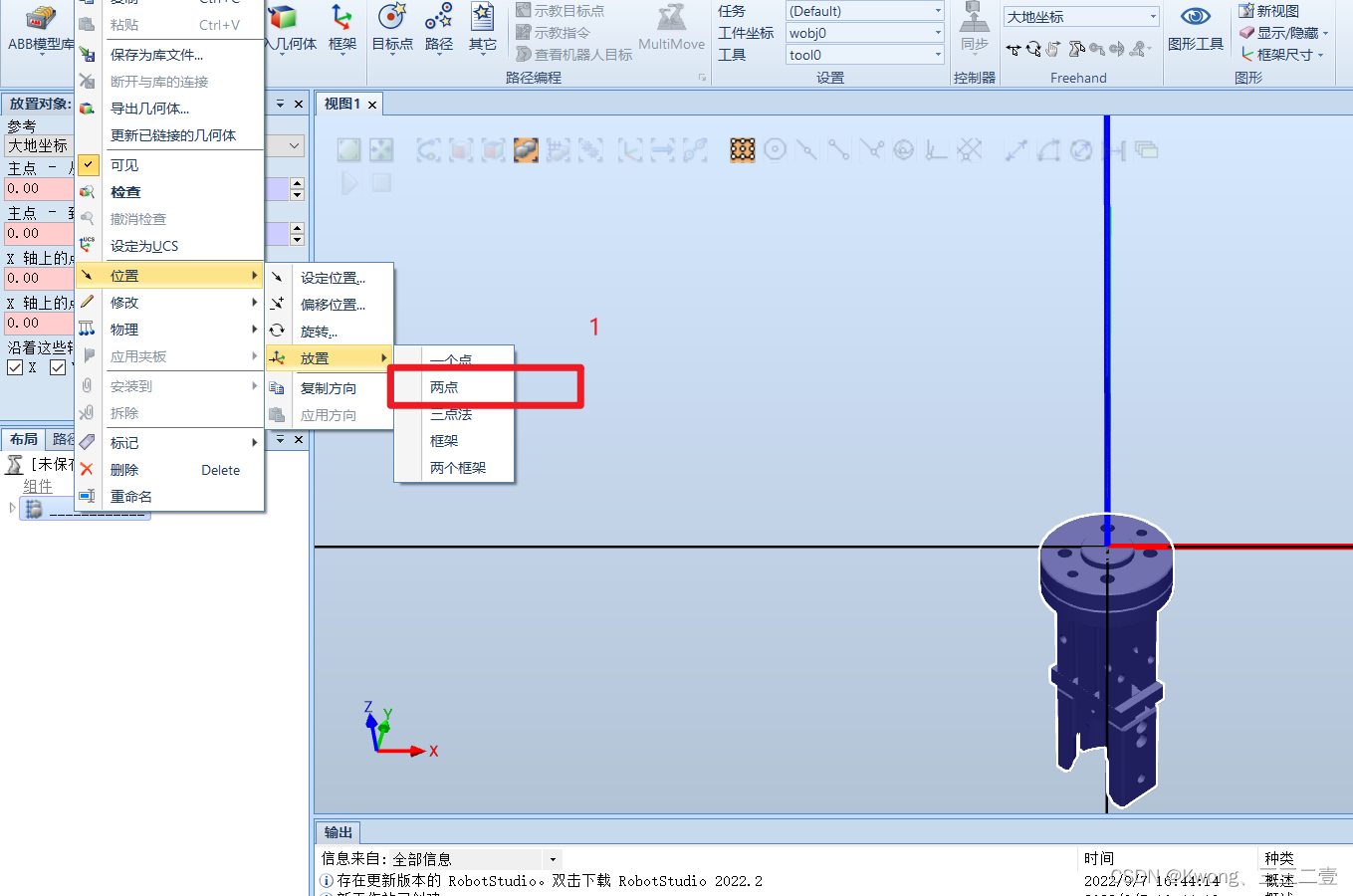

然后为下图所示
 之后设置本地原点,选在底部中心。
之后设置本地原点,选在底部中心。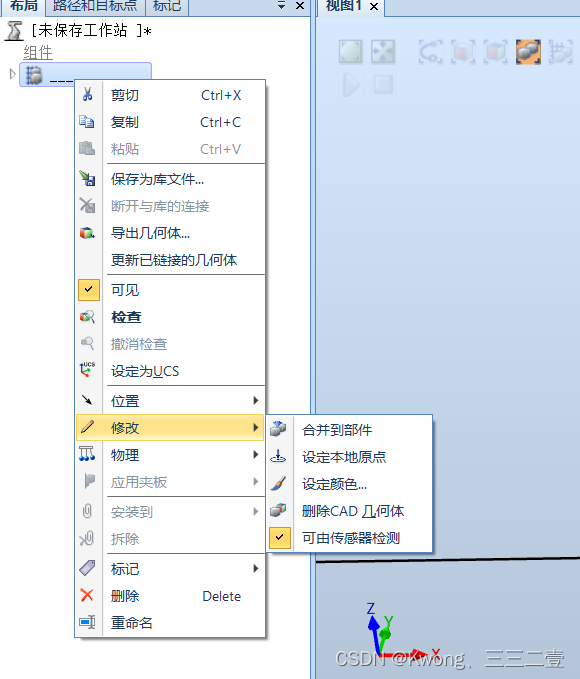
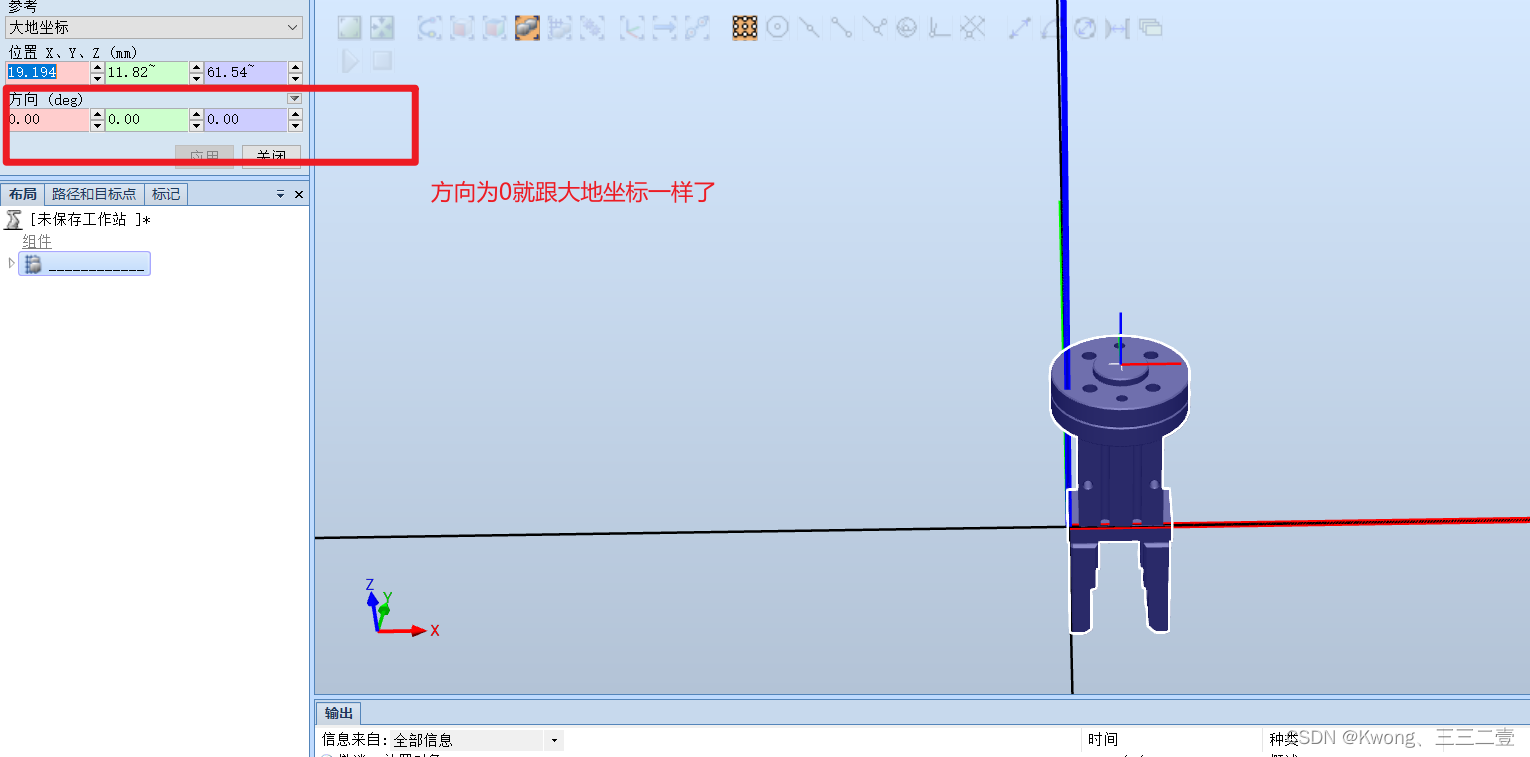
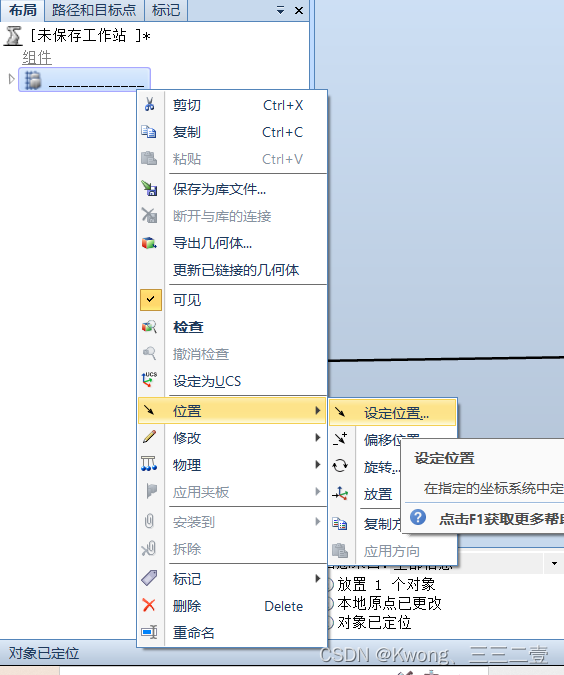
设定位置在0,0,0点处。

问题五: 组合里面的东西退不出来怎么办?
解决办法如图
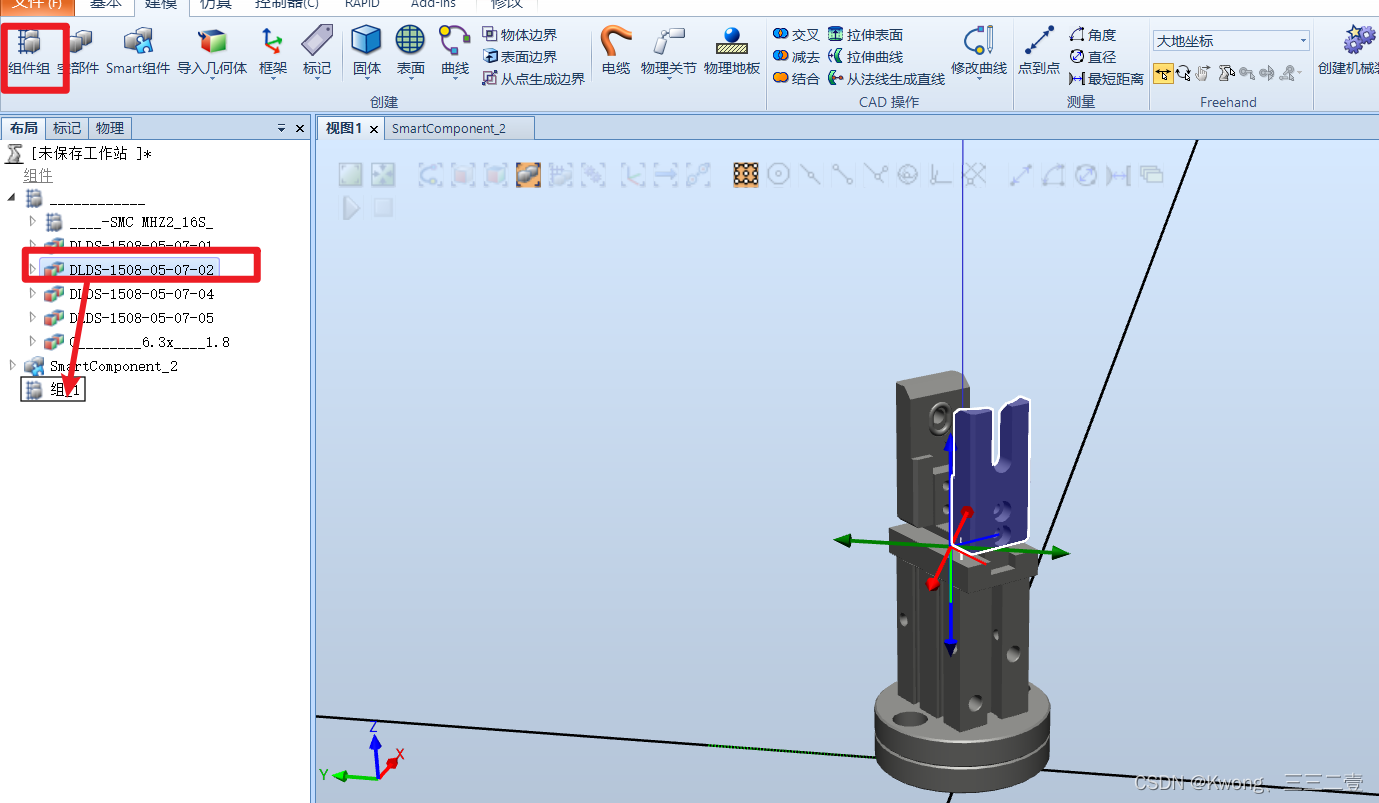
问题六:动态夹具做好了,当我的夹具夹工件的时候出现了下图大型分尸现场。
解决办法:把组合里的物体合在一个部件里面。
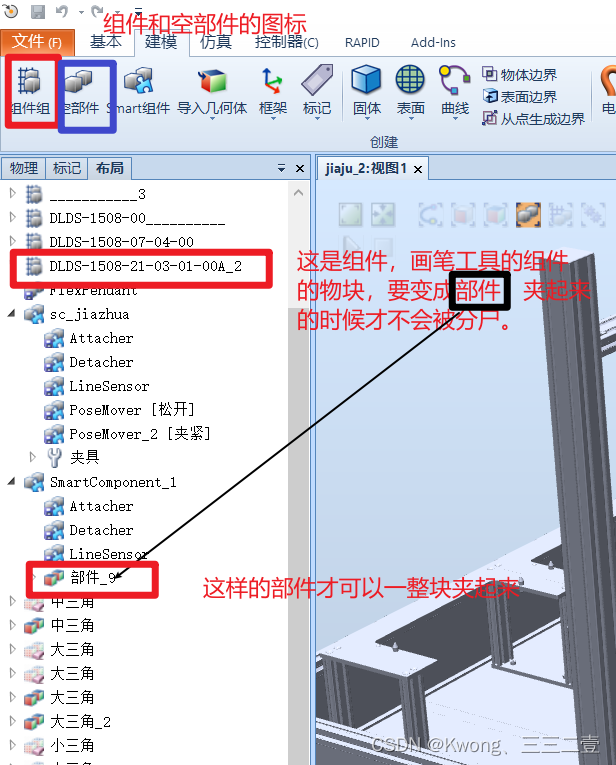
原来是这样:
要改成这样:
周四
今天用画笔画了画板,写了段程序。运用的是捕捉路径目标点,每次起笔收笔用了偏移指令,设置了笔的home安全位置。程序参考大作业或者示例程序的框架。今天主要解决吸盘动态问题。
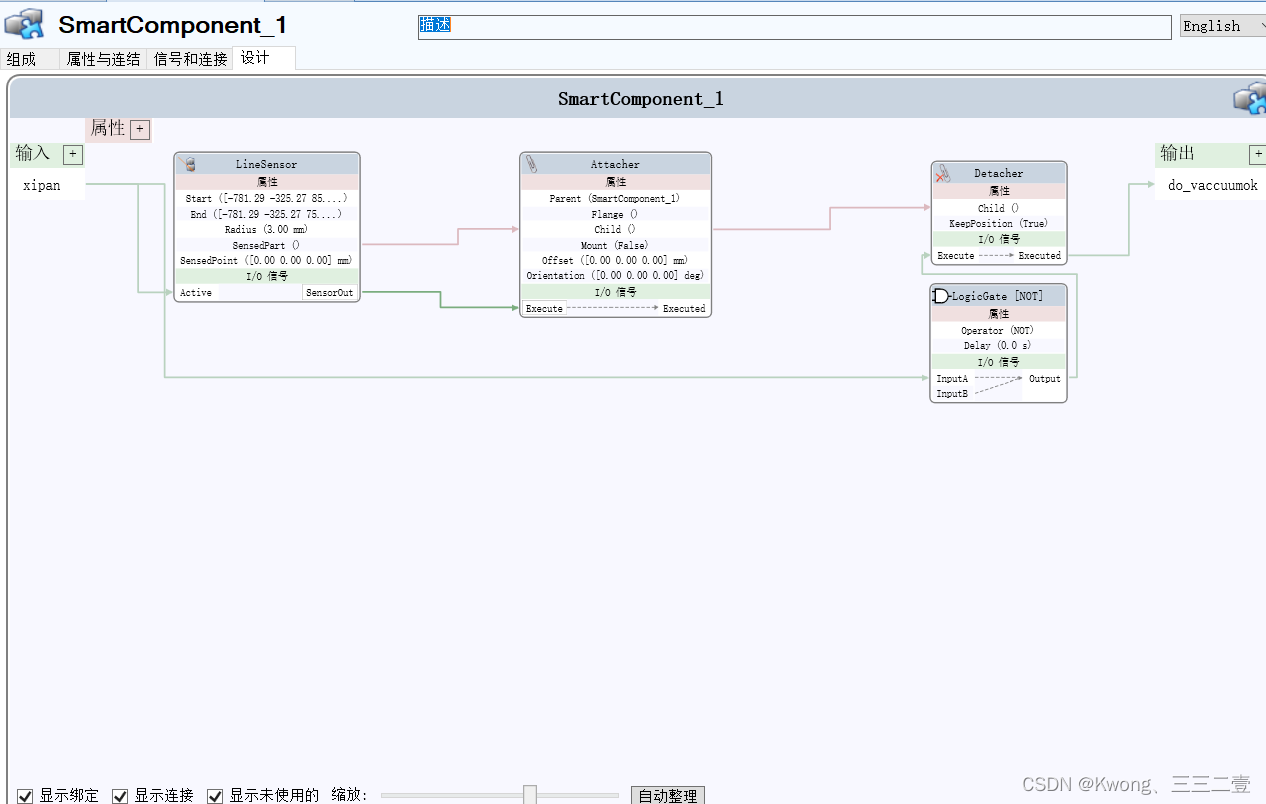
吸盘smart组件设计逻辑:
问题一:传感器无法跟着smart组件物体走怎么办?
解决办法,把smart组件列表里的“线传感器”右键点击“安装到”,选择该物体部件,就可以跟随了。
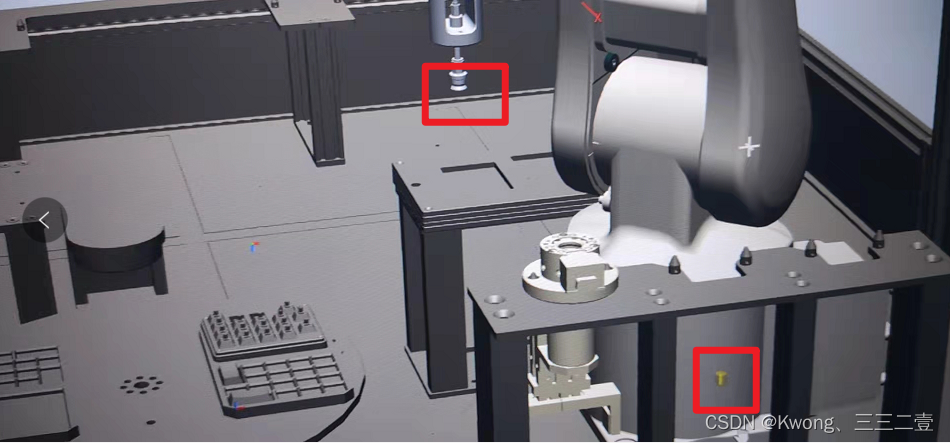
问题二:线传感器无法感应到物体,给了信号也没法触动吸的动作。
可能原因:线传感器太短,或者太细,够不着物体,导致不能触发传感器状态。
smartc_(简称sc)组件的组件选择里面,部件设置成了role,导致不能触发传感器状态。
sc组件的“安装”对象设置在调试的过程中自动变了,应该是选整个sc,所以导致吸不起来。
sc的设计逻辑出问题,导致吸不起来。
解决办法:查找如上问题进行调试,传感器不要接触作为夹具的物体,否则会识别夹具自身,就吸不了别的物体,而且传感器要穿进别的物体,不然可能进不去。
注意,吸盘要可被传感器检测,且传感器不要碰到吸盘。
问题三:移动布局里的物体显示移动对象失败怎么办?

解决办法:先看看那个部件有没有被安装,如有安装先拆除。然后选择物体们手动复制粘贴过去。
问题四:如何规划程序?
在做点对点示教的时候,点示教指令,生成了示教的目标点和MoveL指令,显示吸盘或者工具进行目标点姿态调整。没有问题后就添加基本逻辑语句。这里主要是把偏移,home点,安全点,起点,终点,偏移指令,和初识化的程序简单写出。
问题五:没有设置中断和复位的信号和程序,每次仿真后就可能会出现物体不在原位,夹具没有松开的情况。
此时可以重启控制器,要是还是不行就重启软件。或者在物体原位置设置物体本地原点,记录那个点,每次只要选择物体,“设定位置”,“0,0,0”长度方向都是0就可以。
周五
今天把所有的六周功能都实现了,就是七巧板只示教了一块,其它的同理。解决昨天的吸盘遗留问题, 排除设置。还有新任务,下周做另外两个工作站的程序,终于不用做动态夹具了!!
问题一:由于之前示教的时候只是大概点了七巧板位置,导致机器人吸取放下后七巧板位置有很大偏差,在调整七巧板的时候运用了目标点偏移导致效果不佳,吸七巧板的时候,吸了两块,且底下那块还安装在了吸盘工具上面。
解决办法:放置的时候,吸着七巧板导到终点,调整七巧板方向,再示教目标指令。传感器不要过长。
问题二:工作站如何打包?

















 4802
4802

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









