






 本文介绍了如何在Ubuntu22.04操作系统上使用ROS2驱动思岚A2激光雷达,包括下载驱动、安装、测试雷达以及在rviz2中显示雷达数据。此外,还详细阐述了如何为激光雷达的串口设置别名以避免权限问题和端口冲突。
本文介绍了如何在Ubuntu22.04操作系统上使用ROS2驱动思岚A2激光雷达,包括下载驱动、安装、测试雷达以及在rviz2中显示雷达数据。此外,还详细阐述了如何为激光雷达的串口设置别名以避免权限问题和端口冲突。
准备:思岚A2激光雷达、ubuntu22.04+ros2-humble
前言
随着ros被ros2逐渐的取代,本文主要介绍ros2怎么驱动激光雷达,以思岚A2激光雷达为例!

一、下载驱动
https://github.com/Slamtec/sllidar_ros2.git二、安装
新建一个工作空间
mkdir laser_ws && cd laser_ws/
mkdir src && cd src/
git clone https://github.com/Slamtec/sllidar_ros2.git
cd ..
colcon build --symlink-install三、测试
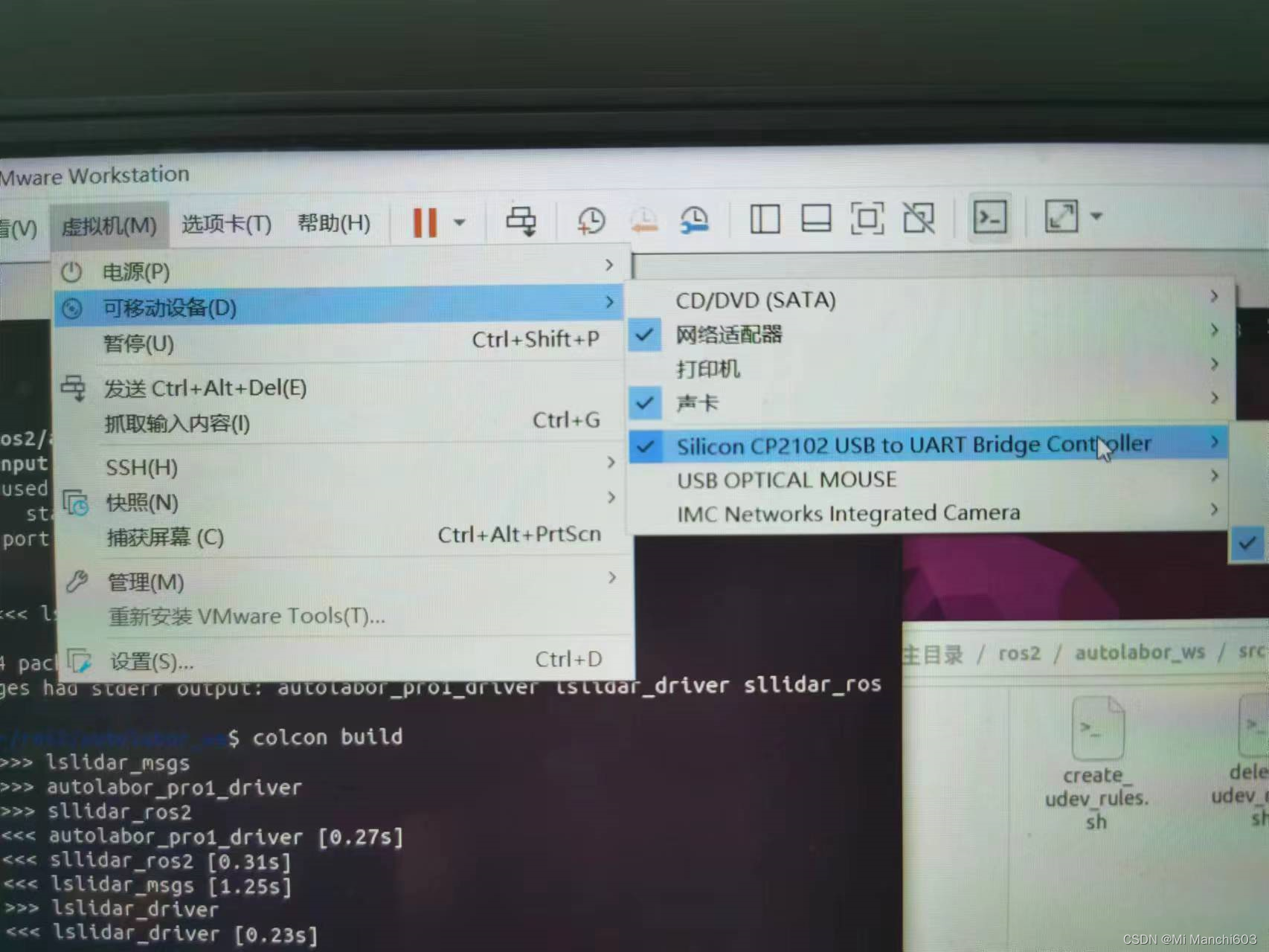
把激光雷达的usb接到你的PC,虚拟机运行ubuntu22.04需要注意是否接上。
查看所有的USB设备
ls /dev/ttyUSB*
可以看到激光雷达的端口是
/dev/ttyUSB0
给端口权限
sudo chmod 777 /dev/ttyUSB0
source install/setup.bash
ros2 launch sllidar_ros2 sllidar_launch.pyros2 topic list 
接着我们订阅/scan这个话题,并用可视化界面查看数据
rviz2把Fixed Frame 改为 雷达的固定坐标系 laser,添加 LaserScan 查看雷达数据

可以看到雷达驱动成功,拿到数据!
接着我们可以给端口起个别名,这样每次插拔这个雷达就不用给权限也不会导致端口冲突!
cd src/sllidar_ros2/scripts/
gedit create_udev_rules.sh修改一下改为当前目录
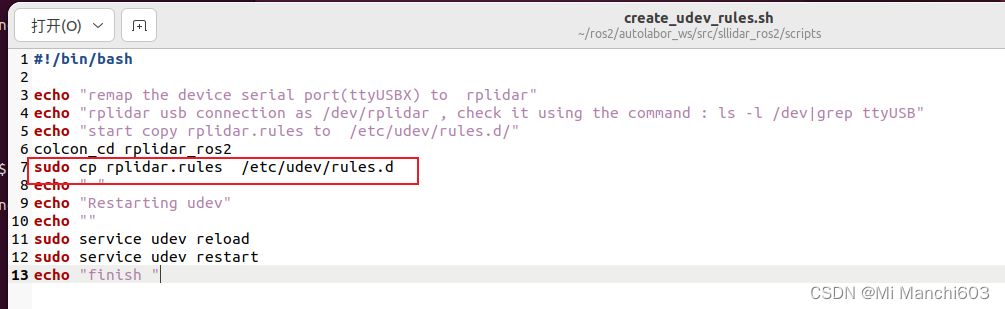
保存运行
. create_udev_rules.sh查看端口别名是否修改成功
ls -l /dev/ | grep ttyUSB
可以看到修改成功!后面运行ros2程序的时候就可以直接使用/dev/rplidar这个别名了!
给串口起别名可以看我这篇文章!
总结
本文使用了ROS2驱动了思岚A2激光雷达,并且在rviz2中显示了雷达数据,还根据激光雷达的芯片型号给激光雷达串口起别名!


















 4961
4961

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









