






ROS2-humble驱动速腾16线激光雷达(超级详细!!!)
准备:
系统:ubuntu22.04 + ROS2-humble
激光雷达:速腾16线激光雷达
电源:12V电源
1.软件安装
打开虚拟机:新建一个工作空间:
mkdir laser_ws && cd laser_ws/
mkdir src && cd src/
git clone https://github.com/RoboSense-LiDAR/rslidar_msg.git
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update
sudo apt-get update
sudo apt-get install -y libyaml-cpp-dev
sudo apt-get install -y libpcap-dev
使用 ROS2 编译
(1)在文件CMakeLists.txt之上,将变量COMPILE_METHOD设置为COLCON。
set(COMPILE_METHOD COLCON)
(2)文件package_ros2.xml留着并且重命名为package.xml,将其他的package.xml删掉
(3)回到工作空间根目录,运行以下命令进行编译运行。
先编译 rslidar_msg,编译之后可能需要source install/setup.bash再编译rslidar_sdk
colcon build --packages-select rslidar_msg
colcon build --packages-select rslidar_sdk
接下来我们连接硬件
2.激光雷达硬件连接
硬件连接入下图所示:
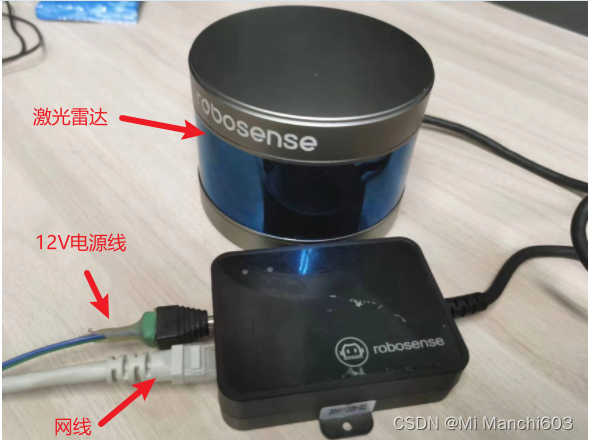
如图所示两个红点对准按上就好!

网线另一端插在笔记本上!
3.网络设置


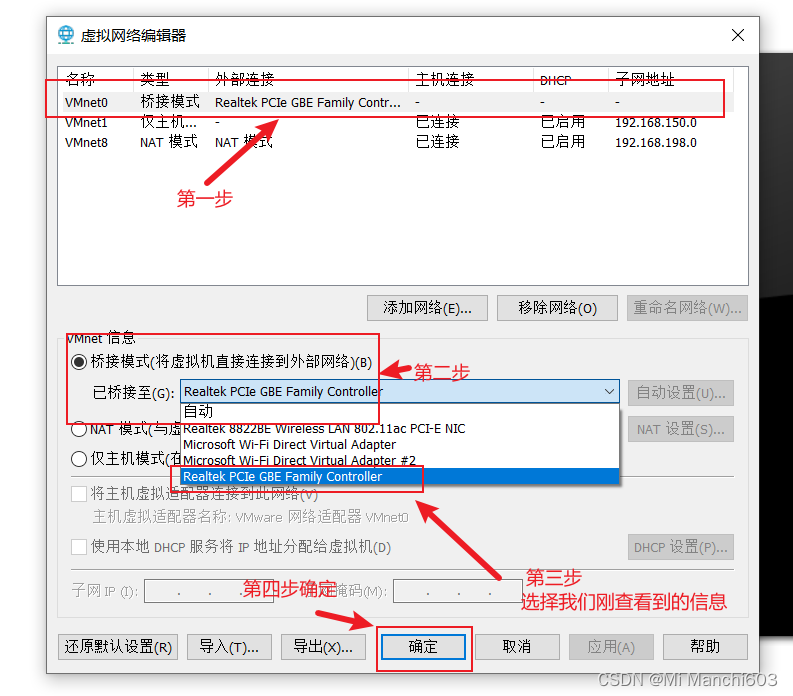
可以看到以太网的描述信息是:Realtek PCIe GBE Family Controller 记住这个信息
打开虚拟机
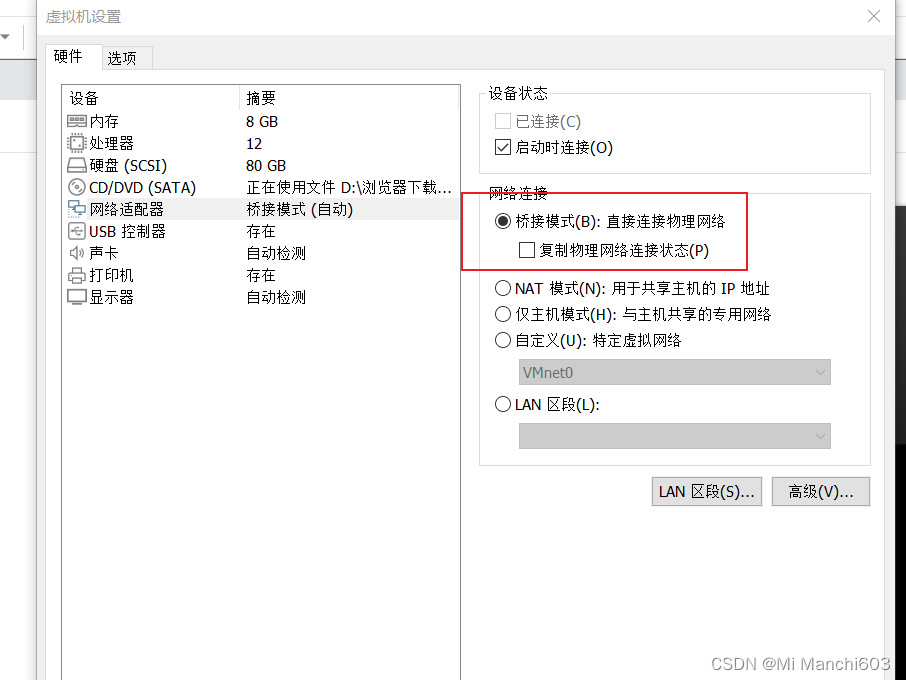
3-1.设置网络是适配器为:桥接模式
3-2.编辑虚拟网络


3-3打开虚拟机
3-3-1 设置固定ip
设置->网络->添加配置
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-msD8rLfx-1685778605132)(ROS2驱动速腾16线激光雷达.assets/image-20230530142440335.png)]](https://i-blog.csdnimg.cn/blog_migrate/8b68896f3bd8610d50ad166f7e73d161.png)
速腾聚创16线激光雷达出厂默认发送到192.168.1.102
地址:192.168.1.102
子网掩码:255.255.255.0
DNS:223.5.5.5
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-A1KPuNyY-1685778605133)(ROS2驱动速腾16线激光雷达.assets/image-20230530143201427.png)]](https://i-blog.csdnimg.cn/blog_migrate/5d6ca9ac7b64faeab6a8a580f07b9692.png)
打开终端输入:
ifconfig
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UmSi7jrd-1685778605133)(ROS2驱动速腾16线激光雷达.assets/image-20230530143323898.png)]](https://i-blog.csdnimg.cn/blog_migrate/69e6301b86554299829d002c489c1b0c.png)
有线 固定ip 设置成功!
3-3-2 测试硬件是否连接正常
ping 192.168.1.200
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Md56W5QL-1685778605134)(ROS2驱动速腾16线激光雷达.assets/image-20230530150604563.png)]](https://i-blog.csdnimg.cn/blog_migrate/9ff3e7207ac1ed49d94ae24bb4fbc4f8.png)
ping通硬件连接正常!!!
3-3-3 查看数据传输
ens33为有线网络设备名
sudo tcpdump -n -i ens33
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-lRUfIh8N-1685778605134)(ROS2驱动速腾16线激光雷达.assets/image-20230530145042336.png)]](https://i-blog.csdnimg.cn/blog_migrate/b0887c7fe5a99db83e453a534155eb7c.png)
正如上面显示 雷达的IP:192.168.1.200 发送到我们pc配置的固定ip:192.168.1.102 目的端数据包 1248 个字节,则表示雷达数据发送正常!
4.编辑配置文件并测试
打开配置文件
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3IcehHn5-1685778605134)(ROS2驱动速腾16线激光雷达.assets/image-20230530145243524.png)]](https://i-blog.csdnimg.cn/blog_migrate/a98daba2f81aa7c9733a69a3e7f6f806.png)
需要修改的内容如下:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ubCAcHlT-1685778605135)(ROS2驱动速腾16线激光雷达.assets/image-20230530145340427.png)]](https://i-blog.csdnimg.cn/blog_migrate/3dbe94880b1aae553eed18e5345e7c89.png)
common:
msg_source: 1 #0: not use Lidar
#1: packet message comes from online Lidar
#2: packet message comes from ROS or ROS2
#3: packet message comes from Pcap file
send_packet_ros: true #true: Send packets through ROS or ROS2(Used to record packet)
send_point_cloud_ros: true #true: Send point cloud through ROS or ROS2
lidar:
- driver:
lidar_type: RS16 #LiDAR type - RS16, RS32, RSBP, RSHELIOS, RSHELIOS_16P, RS128, RS80, RS48, RSP128, RSP80, RSP48,
# RSM1, RSM1_JUMBO, RSM2, RSE1
msop_port: 6699 #Msop port of lidar
difop_port: 7788 #Difop port of lidar
start_angle: 0 #Start angle of point cloud
end_angle: 360 #End angle of point cloud
wait_for_difop: true
min_distance: 0.2 #Minimum distance of point cloud
max_distance: 200 #Maximum distance of point cloud
use_lidar_clock: false #True--Use the lidar clock as the message timestamp
#False-- Use the system clock as the timestamp
pcap_path: /home/robosense/lidar.pcap #The path of pcap file
ros:
ros_frame_id: rslidar #Frame id of packet message and point cloud message
ros_recv_packet_topic: /rslidar_packets #Topic used to receive lidar packets from ROS
ros_send_packet_topic: /rslidar_packets #Topic used to send lidar packets through ROS
ros_send_point_cloud_topic: /rslidar_points #Topic used to send point cloud through ROS
colcon build 编译
cd laser_ws/
colcon build
source install/setup.bash
ros2 launch rslidar_sdk start.py
rivz2点云如下:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-qCHTLncq-1685778605135)(ROS2驱动速腾16线激光雷达.assets/image-20230530145733189.png)]](https://i-blog.csdnimg.cn/blog_migrate/14b999412e4eb51f324b7af80437e262.png)
#可以看看有哪些话题,后面建图使用!
ros2 topic list
到此就在ros2-humble版本上成功的驱动了速腾16线激光雷达!


















 420
420

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









