







激光雷达空洞现在看来无外乎两种原因
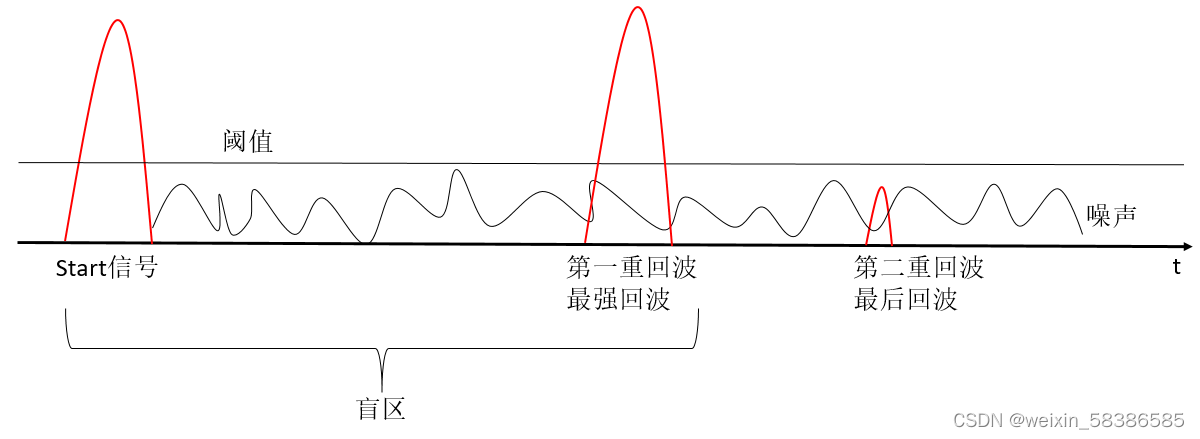
原因一:近距离高反且无双回波(单一可能),导致点云距离出现在盲区内,被雷达系统滤除;
通常市面上已有的激光雷达通常会有单回波与双回波两种模式;
单回波通常会有两种选择:最后/最强;最后是指雷达可接收到两个回波,但显示点云和输出数据时,只输出和显示最远的一重回波,最强是指,雷达在接收到的两个回波中选择更强的回波。
而双回波模式下,通常可以显示最后与最强回波并存,当然也可能有别的模式,笔者没有深入对比。

而众所周知,激光雷达前端会有PC材质或玻璃材质的光学窗口,而窗口本身也具有一定的光学特性,这些特性可以总结为:
1. 小角度透过率较高,大角度透过率较低(同时反射率较高);
2. 光窗对光线有一定折射作用,导致角度相对理想角度有一定偏移;
3. 光窗透过率并不是100%,所以光线通过光窗会造成一部分光能损失,即降低探测距离。

此情况下可能形成空洞的原因分析:
大角度(不限于大角度,关键在于反射光进入了探测器且被识别,提大角度是因为大角度反射率更高,回波更强,易被探测)反射光在此反射角度下,当然也可能经历雷达内部的各种镜面反射或漫反射,进入探测器,变成单回波的最强回波,因此距离在盲区内,点云数据置为零,在远距离下形成空洞,具体形成空洞的位置和角度与雷达本身布置有关。
双回波下,同时存在最远和最强回波,但由于大角度时反射率较大,透过率变小,而雷达出光功率本身较低,噪声较大,出射光线被雷达噪声(内部噪声或太阳光造成的杂散光噪声)所淹没,即出射光回波强度低于阈值,导致最远回波被淹没,形成空洞。
以上是在不考虑外部杂散光情况下,点云形成空洞的原因。
原因二:
我们都知道激光雷达所用光为脉冲型红外光,而我们的太阳光为连续光。而雷达接收部分模拟前端在探测器后通常会接入TIA来放大信号。而TIA本身特性导致,当入射光电流较大时超过界限,则TIA输出的电压波形会对波形进行展宽。下图是TI的激光雷达专用TIA放大器,针对电流与输出电压波形的脉宽展宽对比。
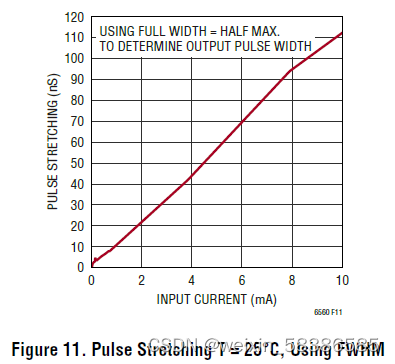
TIA输出电压信号随输入电流信号增大而展宽
当我们接收到一重回波时,我们通常要识别其上升沿与下降沿,当识别不到下降沿时,我们将此信号当做无用信号,不再传输给后级电路;
目前市面上905nm波长的激光雷达最远探测距离通常为300m,对应光飞行时间为2μs,而实际情况下,由雷达脉冲光叠加近距离高反也很难使TIA达到2μs的脉宽展宽,但如果有阳光直射如雷达,由于太阳是连续光,APD作为积分器件,并未像盖革模式下APD(即SiPM和SPAD)有被动淬灭模式,则TIA脉宽会无限展宽,导致在某些角度下,雷达系统识别不到下降沿,导致出现视场空洞。
激光雷达是一种光学高精密仪器,而雷达的关键在于光学,我们的生活与光息息相关,很多激光雷达出现的现象,在生活中自然光下同样可以复现。比如常说的鬼像问题,当我们带上墨镜时,墨镜表面偶尔会有模糊的影子,即为自然光下的鬼像,这种情况并不少见,不同在于,人可以对此情况进行准确的判断,但雷达却需要更复杂的算法来对这些情况进行处理。















 1725
1725











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









