






 本文介绍了ROS中用于管理话题的命令,如rostopiclist、rostopictype和rostopicecho等,以及如何查看和控制小乌龟节点的话题,特别是/turtle1/cmd_vel,用于设置小乌龟的速度和方向。
本文介绍了ROS中用于管理话题的命令,如rostopiclist、rostopictype和rostopicecho等,以及如何查看和控制小乌龟节点的话题,特别是/turtle1/cmd_vel,用于设置小乌龟的速度和方向。
rostopic bw display bandwidth used by topic #打印话题的带宽
rostopic delay display delay of topic from timestamp in header #打印话题的延迟
rostopic echo print messages to screen #打印话题的信息
rostopic find find topics by type #通过类型去找这个话题
rostopic hz display publishing rate of topic #打印话题的发布频率
rostopic info print information about active topic #打印话题的详细信息
rostopic list list active topics #列出现在拥有的话题
rostopic pub publish data to topic #发布一些数据到话题中
rostopic type print topic or field type #打印话题的类型
1,启动小乌龟
roscore #启动节点
rosrun turtlesim turtlesim_node #发布节点信息
rosrun turtlesim turtle_teleop_key #启动键盘控制
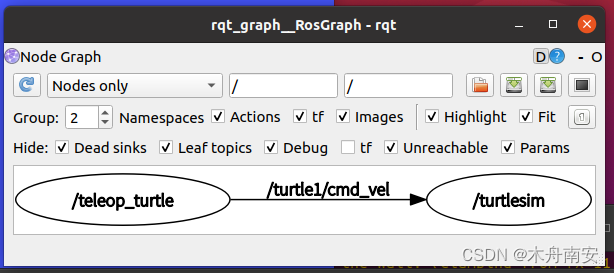
rqt_graph #可视化节点关系这是发布小乌龟话题后的可视化节点
2,查看小乌龟的话题
rostopic list #查看话题列表
/rosout #默认话题
/rosout_agg #默认话题
/turtle1/cmd_vel #速度话题
/turtle1/color_sensor #颜色样式话题
/turtle1/pose #位置话题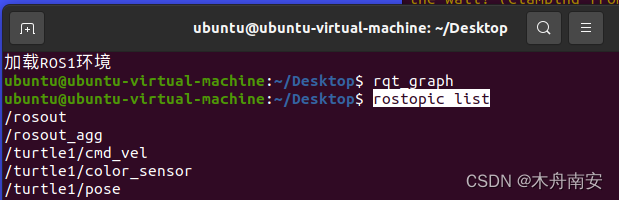
rostopic type /turtle1/cmd_vel #查看消息的话题类型,信息(小乌龟话题的速度类型)![]()
rosmsg show geometry_msgs/Twist #显示接口相关信息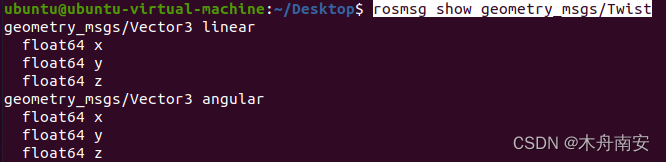
geometry_msgs/Vector3 linear #线速度
float64 x #变量 x y z type类型浮点型
float64 y
float64 z
geometry_msgs/Vector3 angular #角速度
float64 x #变量 x y z type类型浮点型
float64 y
float64 z
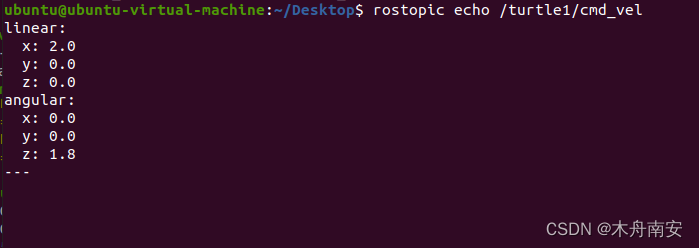
rostopic echo <topic_name> #查看话题内容
rostopic echo /turtle1/cmd_vel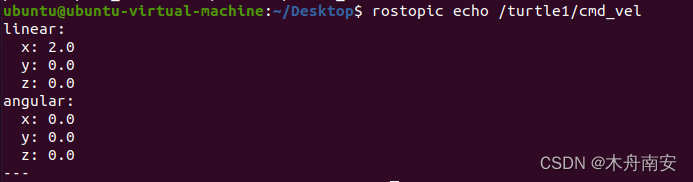
rostopic pub <topic_name> <msg_type> '<args>' # 发布命令
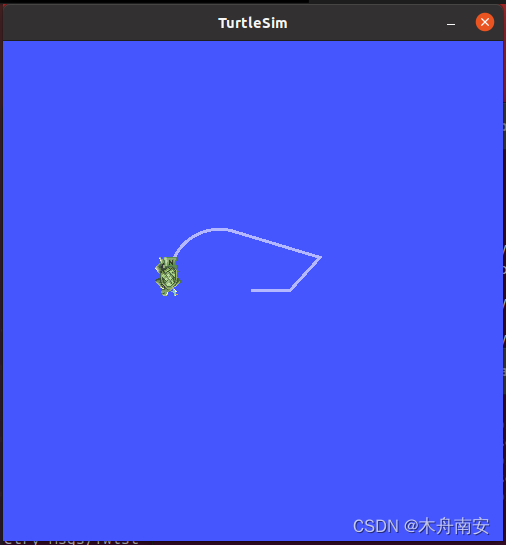
#发布速度命令
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'#小乌龟画弧线

















 1293
1293

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









