






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
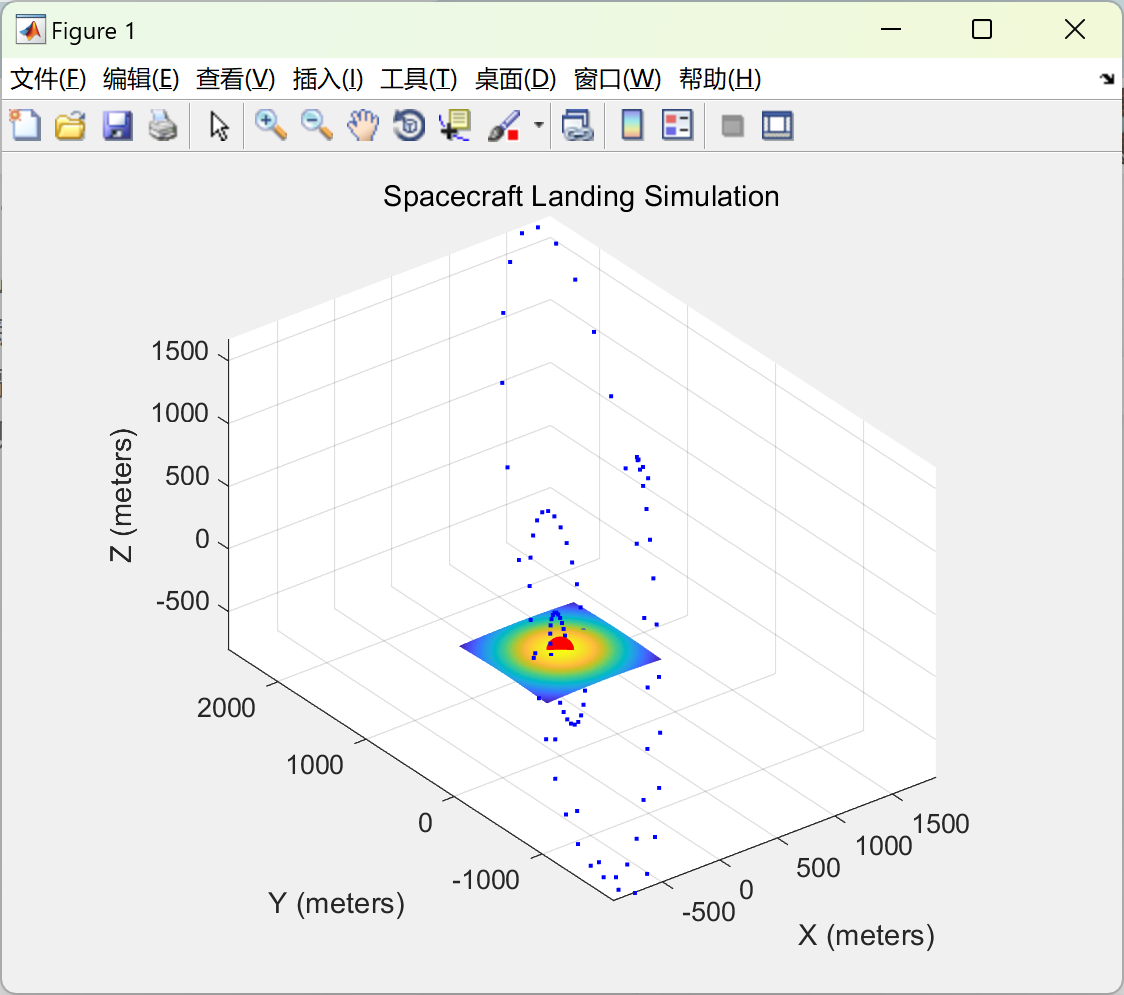
在模拟航天器降落在月球表面的过程中,我们希望跟踪航天器的位置和速度,并将其3D轨迹可视化,以便分析其下降过程。我们将使用卡尔曼滤波器来估计航天器的位置和速度。卡尔曼滤波器可以提供对动态系统状态的最优估计,同时考虑了测量噪声和系统噪声。在每个时间步中,我们将使用卡尔曼滤波器对航天器的状态进行预测和更新。预测阶段利用状态转移方程进行位置和速度的预测,更新阶段利用观测数据对状态进行更新,融合预测值和测量值得到最优的状态估计。通过使用卡尔曼滤波器模拟航天器降落在月球表面并可视化其3D轨迹,我们可以更好地理解航天器的降落过程,并对其性能进行评估和改进。
📚2 运行结果
主函数部分代码:
% Lunar Surface Simulation and Spacecraft Landing with Kalman Filter
% Parameters
gravity = 1.625; % Lunar gravity in m/s^2
dt = 0.1; % Time step in seconds
simulation_time = 100; % Total simulation time in seconds
initial_altitude = 1000; % Initial altitude in meters
landing_zone_radius = 500; % Radius of the landing zone in meters
% Generate simulated lunar surface data
[X, Y] = meshgrid(linspace(-landing_zone_radius, landing_zone_radius, 100));
Z = 50 * exp(-(X.^2 + Y.^2) / (2 * landing_zone_radius^2)); % Example surface profile
% Find the best landing zone using a statistical method (you can customize this)
landing_zone_mean = mean(Z(:));
landing_zone_std = std(Z(:));
% Identify the landing zone as the area with the lowest altitude
landing_zone = Z < landing_zone_mean - 0.5 * landing_zone_std;
% Initialize spacecraft state
state = struct('position', [0; 0; initial_altitude], 'velocity', [0; 0; 0]);
% Kalman Filter parameters
A = [1, dt, 0.5*dt^2; 0, 1, dt; 0, 0, 1]; % State transition matrix
H = [1, 0, 0]; % Measurement matrix
Q = 0.01 * eye(3); % Process noise covariance
R = 0.1; % Measurement noise covariance
% Initial state estimate and covariance matrix
x = [0; 0; initial_altitude];
P = eye(3);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]陈佳磊,覃记荣,徐小红,等.基于强跟踪的卡尔曼滤波算法道路坡度估计分析[J].专用汽车,2023(11):19-22.DOI:10.19999/j.cnki.1004-0226.2023.11.006.
[2]吴尧帅.基于UWB的室内三维跟踪系统设计[J].单片机与嵌入式系统应用,2023,23(11):71-74.














 266
266











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









