







一、电路连接
参考我第一篇文章里面的电路连接
在原有基础上串联一个舵机

(注意:我这里是串联两个舵机,利用4pin接口线随意连接一个母线端子即可,如果串联多个舵机,要注意连接的方式,得统一方便控制。)
二、实际操作
1.1、舵机串联的ID修改方式
按理来说,如下图,在Tools中应该会有一个ID Inspection的选项,可能是我的版本太低了,每次跳出来有个升级选项,我没管,这里我更新一下。
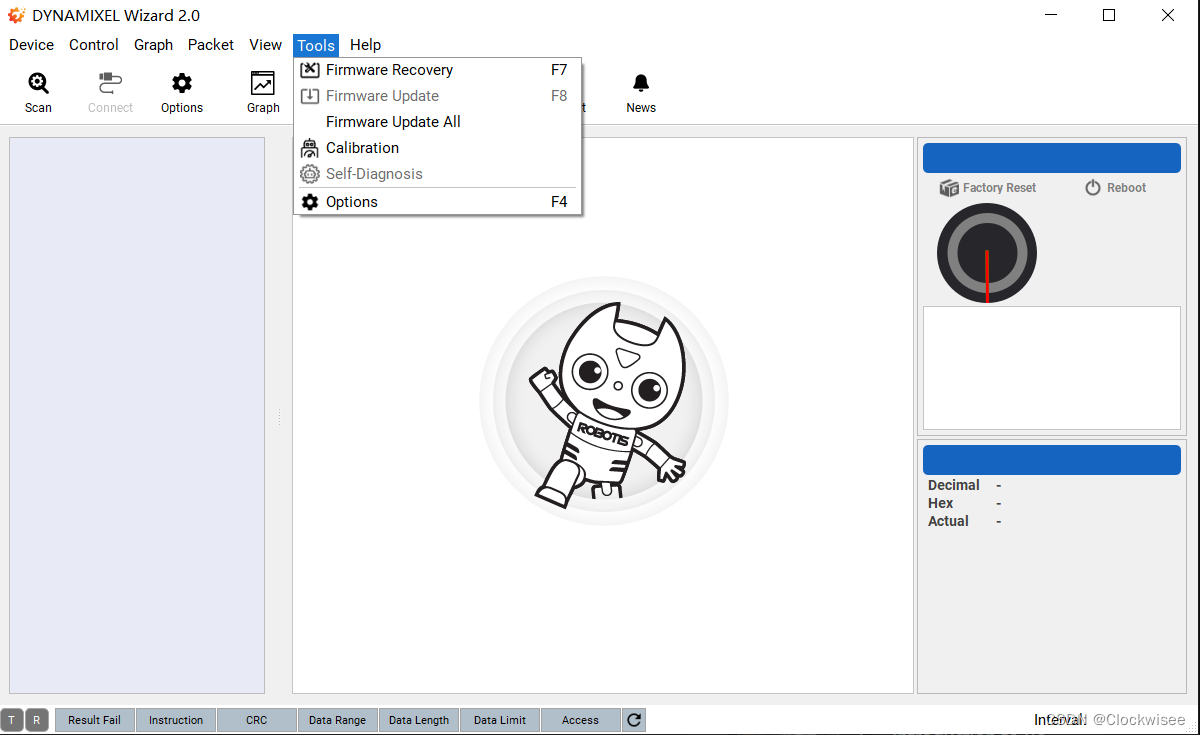
跳出的更新窗口
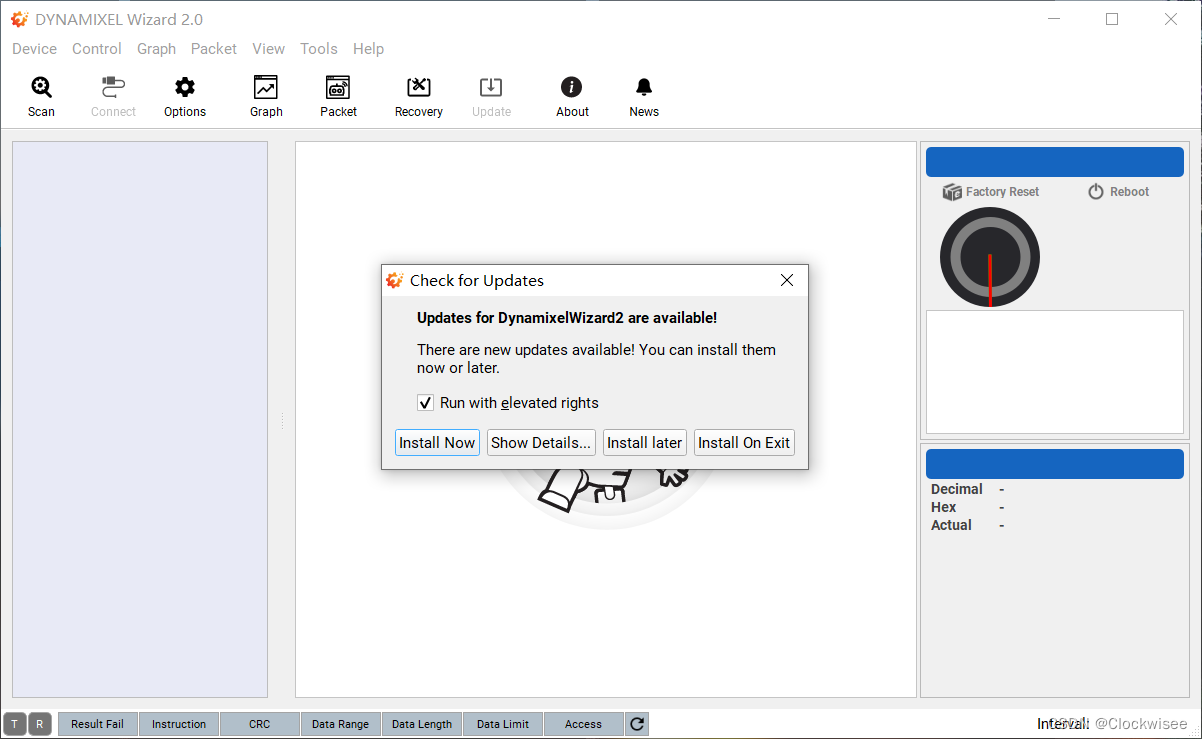
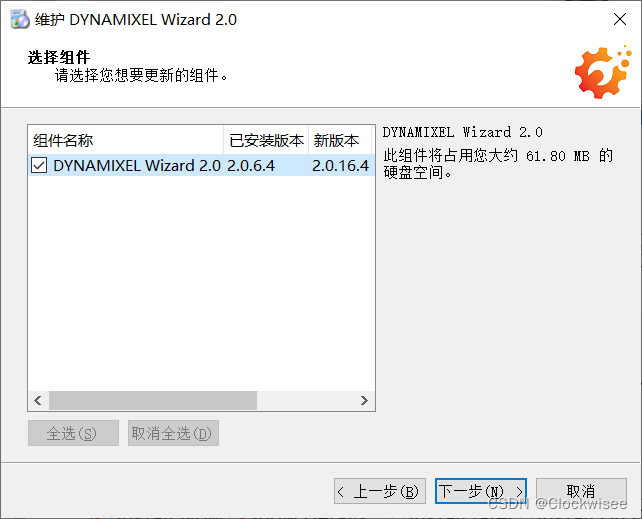
点击----重新启动----安装完成
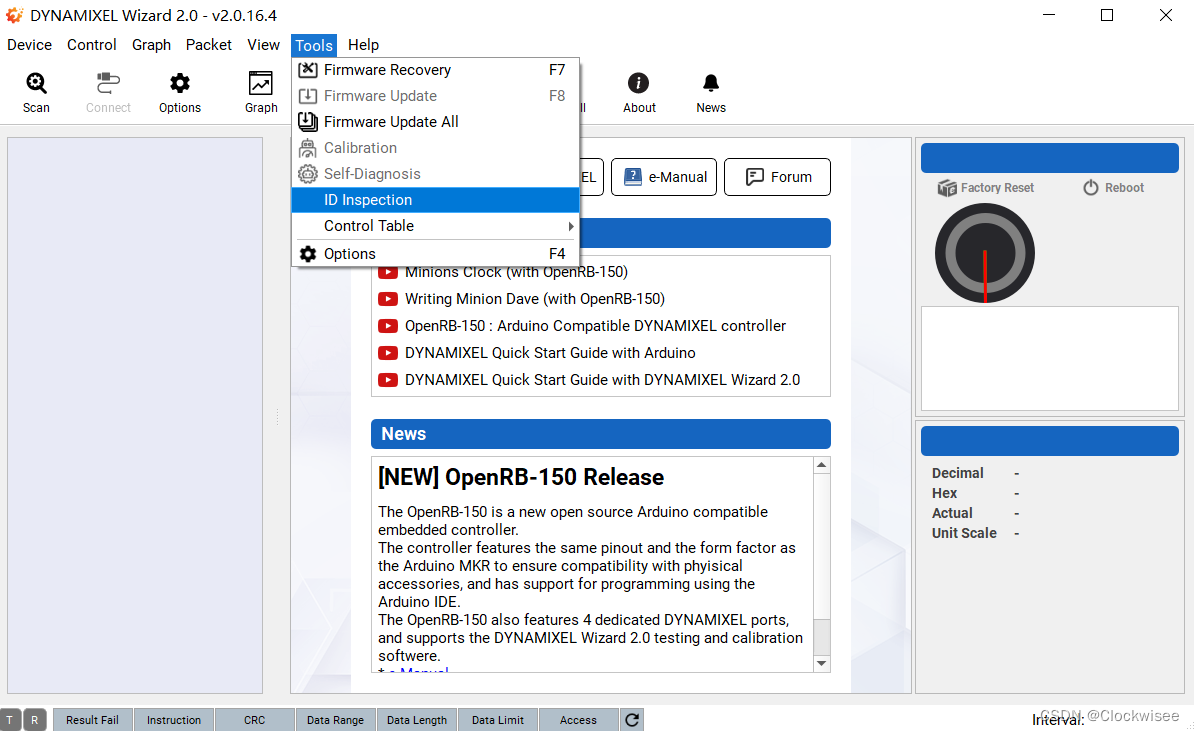
这时候我们看见了ID Inspection的选项----点击ID Inspection----选择正确的com口和波特率----点击scan**(注意:这里我发现一个问题,原来这个功能并不是所有版本都支持的,看下图)**
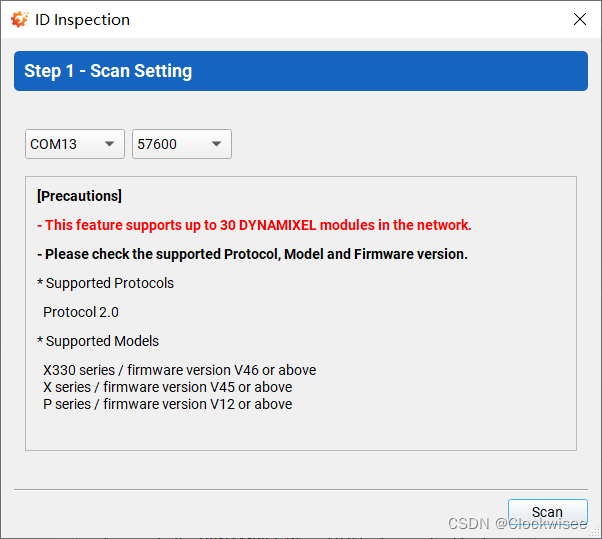
翻译得
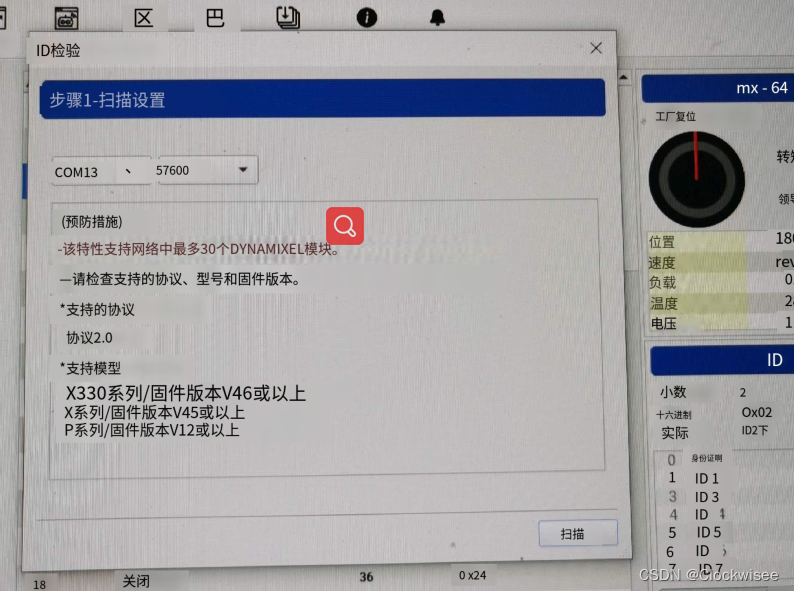
那么,很遗憾,像我们不符合条件的舵机,就真的只能一个一个改了,然后再串联一起。单个修改可以参考我的第一篇文章,里面有关于ID的单个修改。
1.2、例程代码修改
说明:由于我们一般操作的例程就是read_write.py(我是用的是这个python 1.0版本),我们只要在原有的基础上进行ID定义就行了,看下面的两个代码。
修改前代码:read_write.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
################################################################################
# Copyright 2017 ROBOTIS CO., LTD.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
################################################################################
# Author: Ryu Woon Jung (Leon)
#
# ********* Read and Write Example *********
#
#
# Available DXL model on this example : All models using Protocol 1.0
# This example is tested with a DXL MX-28, and an USB2DYNAMIXEL
# Be sure that DXL MX properties are already set as %% ID : 1 / Baudnum : 34 (Baudrate : 57600)
#
import os
if os.name == 'nt':
import msvcrt
def getch():
return msvcrt.getch().decode()
else:
import sys, tty, termios
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
def getch():
try:
tty.setraw(sys.stdin.fileno())
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
from dynamixel_sdk import * # Uses Dynamixel SDK library
# Control table address
ADDR_MX_TORQUE_ENABLE = 24 # Control table address is different in Dynamixel model
ADDR_MX_GOAL_POSITION = 30
ADDR_MX_PRESENT_POSITION = 36
# Protocol version
PROTOCOL_VERSION = 1.0 # See which protocol version is used in the Dynamixel
# Default setting
DXL_ID = 1 # Dynamixel ID : 1
BAUDRATE = 57600 # Dynamixel default baudrate : 57600
DEVICENAME = 'COM13' # Check which port is being used on your controller
# ex) Windows: "COM1" Linux: "/dev/ttyUSB0" Mac: "/dev/tty.usbserial-*"
TORQUE_ENABLE = 1 # Value for enabling the torque
TORQUE_DISABLE = 0 # Value for disabling the torque
DXL_MINIMUM_POSITION_VALUE = 10 # Dynamixel will rotate between this value
DXL_MAXIMUM_POSITION_VALUE = 4000 # and this value (note that the Dynamixel would not move when the position value is out of movable range. Check e-manual about the range of the Dynamixel you use.)
DXL_MOVING_STATUS_THRESHOLD = 20 # Dynamixel moving status threshold
index = 0
dxl_goal_position = [DXL_MINIMUM_POSITION_VALUE, DXL_MAXIMUM_POSITION_VALUE] # Goal position
# Initialize PortHandler instance
# Set the port path
# Get methods and members of PortHandlerLinux or PortHandlerWindows
portHandler = PortHandler(DEVICENAME)
# Initialize PacketHandler instance
# Set the protocol version
# Get methods and members of Protocol1PacketHandler or Protocol2PacketHandler
packetHandler = PacketHandler(PROTOCOL_VERSION)
# Open port
if portHandler.openPort():
print("Succeeded to open the port")
else:
print("Failed to open the port")
print("Press any key to terminate...")
getch()
quit()
# Set port baudrate
if portHandler.setBaudRate(BAUDRATE):
print("Succeeded to change the baudrate")
else:
print("Failed to change the baudrate")
print("Press any key to terminate...")
getch()
quit()
# Enable Dynamixel Torque
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_ENABLE)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
else:
print("Dynamixel has been successfully connected")
while 1:
print("Press any key to continue! (or press ESC to quit!)")
if getch() == chr(0x1b):
break
# Write goal position
dxl_comm_result, dxl_error = packetHandler.write4ByteTxRx(portHandler, DXL_ID, ADDR_MX_GOAL_POSITION, dxl_goal_position[index])
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
while 1:
# Read present position
dxl_present_position, dxl_comm_result, dxl_error = packetHandler.read4ByteTxRx(portHandler, DXL_ID, ADDR_MX_PRESENT_POSITION)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
print("[ID:%03d] GoalPos:%03d PresPos:%03d" % (DXL_ID, dxl_goal_position[index], dxl_present_position))
if not abs(dxl_goal_position[index] - dxl_present_position) > DXL_MOVING_STATUS_THRESHOLD:
break
# Change goal position
if index == 0:
index = 1
else:
index = 0
# Disable Dynamixel Torque
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_DISABLE)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
# Close port
portHandler.closePort()
修改后代码:read_write1.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
################################################################################
# Copyright 2017 ROBOTIS CO., LTD.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
################################################################################
# Author: Ryu Woon Jung (Leon)
#
# ********* Read and Write Example *********
#
#
# Available DXL model on this example : All models using Protocol 1.0
# This example is tested with a DXL MX-28, and an USB2DYNAMIXEL
# Be sure that DXL MX properties are already set as %% ID : 1 / Baudnum : 34 (Baudrate : 57600)
#
import os
if os.name == 'nt':
import msvcrt
def getch():
return msvcrt.getch().decode()
else:
import sys, tty, termios
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
def getch():
try:
tty.setraw(sys.stdin.fileno())
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
from dynamixel_sdk import * # Uses Dynamixel SDK library
# Control table address
ADDR_MX_TORQUE_ENABLE = 24 # Control table address is different in Dynamixel model
ADDR_MX_GOAL_POSITION = 30
ADDR_MX_PRESENT_POSITION = 36
# Protocol version
PROTOCOL_VERSION = 1.0 # See which protocol version is used in the Dynamixel
# Default setting
DXL_ID = 1 # Dynamixel ID : 1
DXL2_ID = 2 # Dynamixel ID : 2
BAUDRATE = 57600 # Dynamixel default baudrate : 57600
DEVICENAME = '/dev/ttyUSB0' # Check which port is being used on your controller
# ex) Windows: "COM1" Linux: "/dev/ttyUSB0" Mac: "/dev/tty.usbserial-*"
TORQUE_ENABLE = 1 # Value for enabling the torque
TORQUE_DISABLE = 0 # Value for disabling the torque
DXL_MINIMUM_POSITION_VALUE = 10 # Dynamixel will rotate between this value
DXL_MAXIMUM_POSITION_VALUE = 4000 # and this value (note that the Dynamixel would not move when the position value is out of movable range. Check e-manual about the range of the Dynamixel you use.)
DXL_MOVING_STATUS_THRESHOLD = 20 # Dynamixel moving status threshold
DXL2_MINIMUM_POSITION_VALUE = 500 # Dynamixel will rotate between this value
DXL2_MAXIMUM_POSITION_VALUE = 3000 # and this value (note that the Dynamixel would not move when the position value is out of movable range. Check e-manual about the range of the Dynamixel you use.)
DXL2_MOVING_STATUS_THRESHOLD = 10 # Dynamixel moving status threshold
index = 0
index2 = 0
dxl_goal_position = [DXL_MINIMUM_POSITION_VALUE, DXL_MAXIMUM_POSITION_VALUE] # Goal position
dxl2_goal_position = [DXL2_MINIMUM_POSITION_VALUE, DXL2_MAXIMUM_POSITION_VALUE] # Goal position
# Initialize PortHandler instance
# Set the port path
# Get methods and members of PortHandlerLinux or PortHandlerWindows
portHandler = PortHandler(DEVICENAME)
# Initialize PacketHandler instance
# Set the protocol version
# Get methods and members of Protocol1PacketHandler or Protocol2PacketHandler
packetHandler = PacketHandler(PROTOCOL_VERSION)
# Open port
if portHandler.openPort():
print("Succeeded to open the port")
else:
print("Failed to open the port")
print("Press any key to terminate...")
getch()
quit()
# Set port baudrate
if portHandler.setBaudRate(BAUDRATE):
print("Succeeded to change the baudrate")
else:
print("Failed to change the baudrate")
print("Press any key to terminate...")
getch()
quit()
# Enable Dynamixel Torque
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_ENABLE)
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL2_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_ENABLE)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
else:
print("Dynamixel has been successfully connected")
while 1:
print("Press any key to continue! (or press ESC to quit!)")
if getch() == chr(0x1b):
break
# Write goal position
dxl_comm_result, dxl_error = packetHandler.write4ByteTxRx(portHandler, DXL_ID, ADDR_MX_GOAL_POSITION, dxl_goal_position[index])
dxl_comm_result, dxl_error = packetHandler.write4ByteTxRx(portHandler, DXL2_ID, ADDR_MX_GOAL_POSITION, dxl2_goal_position[index2])
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
while 1:
# Read present position
dxl_present_position, dxl_comm_result, dxl_error = packetHandler.read4ByteTxRx(portHandler, DXL_ID, ADDR_MX_PRESENT_POSITION)
dxl2_present_position, dxl_comm_result, dxl_error = packetHandler.read4ByteTxRx(portHandler, DXL2_ID, ADDR_MX_PRESENT_POSITION)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
print("[ID:%03d] GoalPos:%03d PresPos:%03d" % (DXL_ID, dxl_goal_position[index], dxl_present_position))
print("[ID:%03d] GoalPos:%03d PresPos:%03d" % (DXL2_ID, dxl2_goal_position[index2], dxl2_present_position))
if not ((abs(dxl_goal_position[index] - dxl_present_position) > DXL_MOVING_STATUS_THRESHOLD) and ((dxl2_goal_position[index2] - dxl2_present_position) > DXL2_MOVING_STATUS_THRESHOLD)):
break
# Change goal position
if index == 0:
index = 1
else:
index = 0
if index2 == 0:
index2 = 1
else:
index2 = 0
# Disable Dynamixel Torque
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_DISABLE)
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL2_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_DISABLE)
if dxl_comm_result != COMM_SUCCESS:
print("%s" % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print("%s" % packetHandler.getRxPacketError(dxl_error))
# Close port
portHandler.closePort()
建议,将第二个代码放入Atom中打开,对比着第一个代码看,有助于理解与运用。
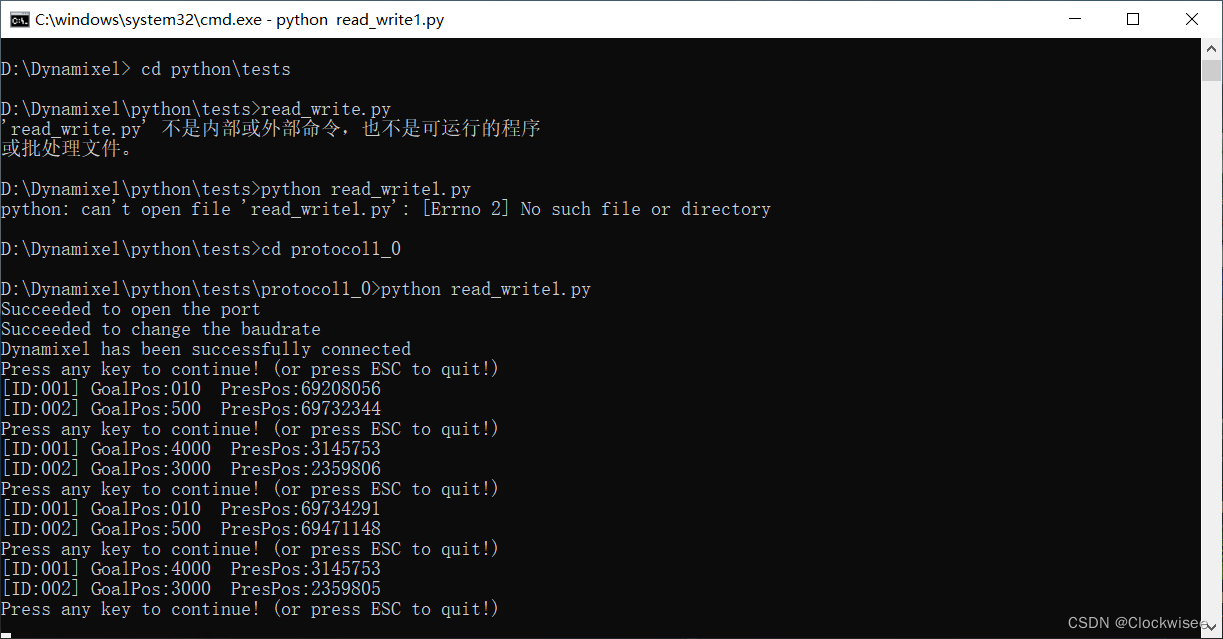
三、结果展示
在这里舵机是运动的
















 367
367











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











