






1、什么是FOC
FOC是一种电机控制算法,全称为FOC(Field-Oriented Control,磁场定向控制)是一种用于电机控制的先进技术,特别适用于永磁同步电机(PMSM)和无刷直流电机(BLDC)。其主要目标是提高电机的性能、效率和动态响应。
这里就有小伙伴困惑了,FOC控制和矢量控制有什么区别呢,我们只需记住一点,FOC控制是矢量控制的一种特定实现。矢量控制是一种控制策略,旨在通过将三相电流转化为直交分量(d轴和q轴)来实现对电机的精确控制,这种方法使得电机的磁通和转矩可以被独立控制。FOC通过实时控制电机的磁场方向,使得电机的运行更加高效和平稳。
2、FOC原理
对于三相PMSM,通常包括转速控制环、电流控制环、PWM调制技术以及转子位置和速度估算。双环控制通过控制电流的大小可以实现电机转速的精确控制,整个双环控制的框图如下图所示:
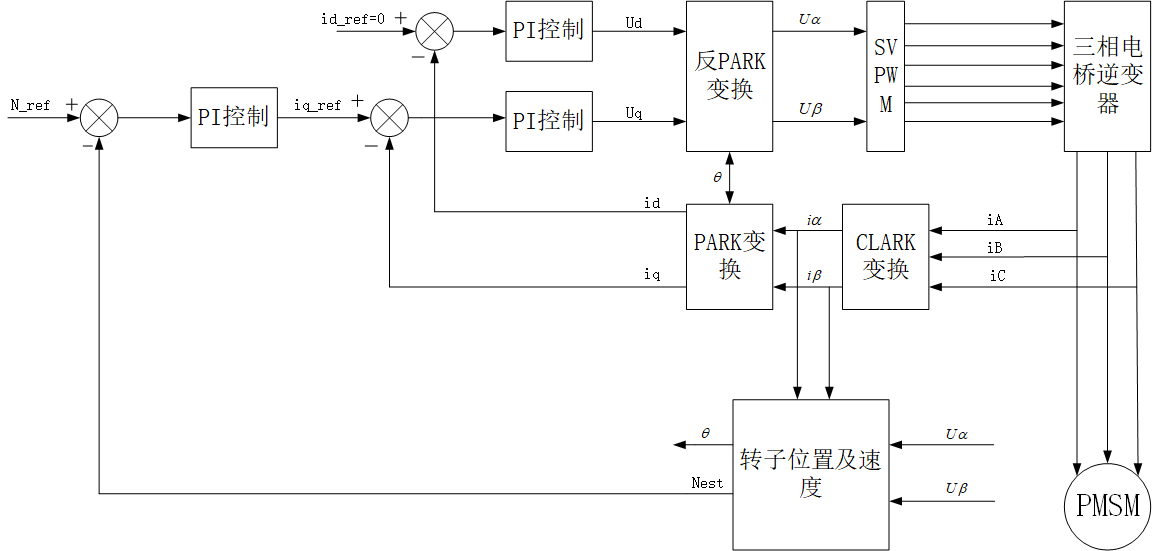
如上图所示:
1、采集三相电流iA、iB、iC;
2、将三相电流进行Clark变换得到两相静止坐标系下的电流iα、iβ;
3、将得到的iα、iβ进行Park变换得到旋转坐标系下的电流id、iq;
4、利用iα、iβ和Uα、Uβ利用观测器估算出转子的转速Nest以及角度θ;
5、计算转子转速误差;
6、将转速误差丢进PID控制器,得出iq_ref;
7、计算电流id、iq的误差;
8、将电流误差丢进PID控制器得到Ud、Uq;
9、将Ud、Uq进行反PARK变换得到Uα、Uβ;
10、Uα、Uβ经过SVPWM得到六路PWM波形,将其输入到三相逆变桥中,得到作用电压UA、UB、UC,用于驱动电机。
从上图中可以看出,FOC的核心为CLARK\PARK变换以及反变换,坐标变换跟SVPWM算法和PID算法以及位置观察将会在后续章节展示。其中位置观察常常使用滑膜观测器以及PLL转子位置估计。上述中id=0实际原因是对于表贴式电机而言,Ld=Lq,在PMSM建模的那一章会说明。
3、FOC的实质
通过以上叙述,相信大家对于FOC算法有了基础的理解,简单来说,FOC就是控制三相电流,让其按照正弦变化,但控制三个变量过于困难,因此需要简化控制变量,进行CLARL变换和PARK变换,将三相自然坐标系变换到同步旋转坐标系中,垂直方向的电流分量所产生磁场正交于转子的磁场,这就产生了旋转力矩。而平行于转子磁轴方向的电流分量,所产生的磁场与转子磁场一致,就不会产生任何的力矩,通过控制id和iq的电流控制磁场的变换,实现有效控制电机的目的。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









