






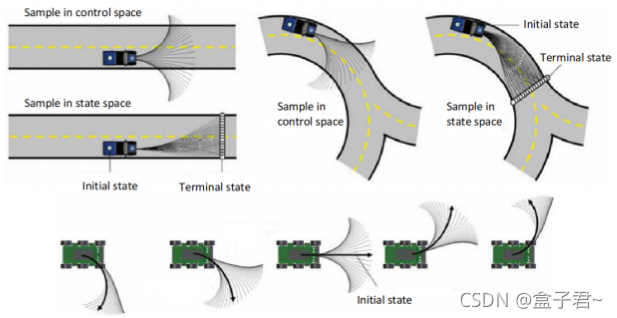
介绍Voronoi图的生成方法,并使用Voronoi Diagram进行路径规划,Voronoi Planner实现在地图中查找一条安全路径,最大程度的避开障碍物。最后对比Voronio Planner 与 采样思想的Sample Planner各自的算法特性。
Voronoi路径规划探索(附C++代码)_维诺图路径规划-CSDN博客
添加图片注释,不超过 140 字(可选)
机器人全局路径规划相关教程及博客请关注专栏:
介绍Voronoi图的生成方法,并使用Voronoi Diagram进行路径规划,Voronoi Planner实现在地图中查找一条安全路径,最大程度的避开障碍物。最后对比Voronio Planner 与 采样思想的Sample Planner各自的算法特性。
Voronoi路径规划探索(附C++代码)_维诺图路径规划-CSDN博客
添加图片注释,不超过 140 字(可选)
机器人全局路径规划相关教程及博客请关注专栏:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 899
899





