




orbslam建图流程,大模块可以分为跟踪线程、局部建图线程、闭环线程、全局BA优化
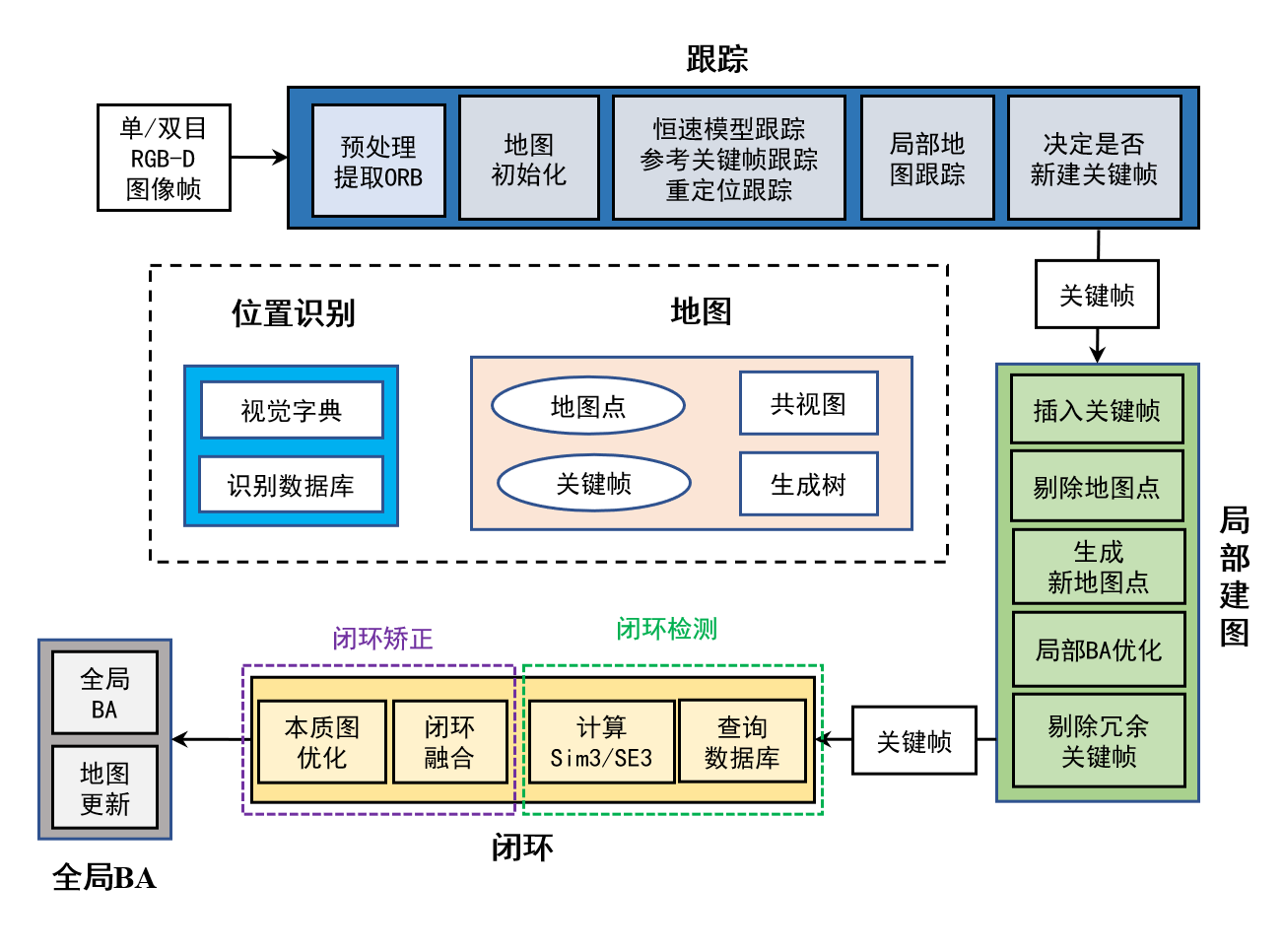
跟踪线程:
主要作用是保证可靠、稳定的跟踪并且在跟踪丢失后重新定位
- 主要包括:预处理提取ORB、地图初始化、三种跟踪方式、局部地图跟踪、决定是否新建关键帧等流程
- 主体分为两部分:从单目/双目/rgb-d相机接收图像帧之后,
- 第一部分:三种跟踪方式(参考关键帧跟踪、恒速模型跟踪、重定位跟踪)保证跟得上(位姿相对不准确)
- 第二部分:局部地图跟踪(将当前帧的局部关键帧对应的局部地图投影到该帧中,得到更多的特征点匹配关系,对第一部分位姿再次进行优化,位姿相对准确)
- 重定位跟踪用的是针孔相机模型下的EPnP算法
局部建图线程:
主要目的是让已有的关键帧之间产生更多的联系,产生更多可靠的地图点,优化共视关键帧的位姿及其地图点,保证跟踪稳定,参与闭环的关键帧位姿更准确。从跟踪线程接收关键帧
- 主要包括
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1963
1963

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









