







算法目的
位姿估计 + 建图
在建图的同时不断优化自身位姿 提高建图的准确度
为广大视觉SLAM算法打下了基础
算法应用场景
- 室内室外均可
- 有明显的并且数量合理的回环检测
- 单目、双目、RGBD
- 算法本身可能无法直接使用 但是为后续算法提供了模版框架
算法优点
- 室内室外均可
- 有明显的并且数量合理的回环检测
- 单目、双目、RGBD
- 算法本身可能无法直接使用 但是为后续算法提供了模版框架
相关概念点
特征点:提取的是ORB特征 包括特征点和它的描述子
关键帧:由若干帧中选出的重要的帧(依据选取间隔、特征点数量等)
参考关键帧:构建这个地图点的关键帧为参考关键帧。
地图点:由关键帧的特征点三角化出的地图点
BA:对位姿和地图点同时进行优化(EM)
BOW:词袋 是特征点的聚类
BOW向量:BOW相似度得分 用一个向量描述整个图像(图像中出现狗 猫 但是没有汽车 记为【1, 1, 0】)得分就是计算两个图像之间的差值
ORB特征点:如角点 边缘点 特征点法中ORB特征点 + 相对应的描述子
描述子:对ORB特征点的位置进行描述
光流法:最小化光度误差 估计相机的运动 不实用描述子但使用特征点
直接法:先估计相机的运动位姿 计算前后两帧相对应的像素点的灰度值 通过减小灰度值的差值 优化相机位姿(可以使用任意像素点而不一定使用特征点 更不需要描述子)
内涵算法
三角化:三角测量算法 根据两帧图像恢复出深度 即地图点
对极几何:根据两帧单目图像恢复出相机运动 生成对极约束 对极约束中包括基础矩阵和本质矩阵 实际中通过求解本质矩阵得到相机变换位姿更多 但本算法使用的是基础矩阵
单应矩阵:恢复相机运动 场景中的特征点都落在了同一平面上 则可以通过单应矩阵进行求解
PnP:已知一帧图像的三维点和另一帧图像的二维点计算出相机位姿
RANSAC:将图像中的外点刨除 外点会极大影响计算结果 多次迭代拟合保留内点
BA优化:e = z - h(T, p) z为像素坐标 T为相机位姿(外参)对应的李群 p为三维点坐标 优化变量:R、t和p坐标 已知:z
sim3:用三对关键帧对应的地图点进行位姿求解(包括旋转矩阵、平移矩阵、尺度变换)
算法实现
tracking线程
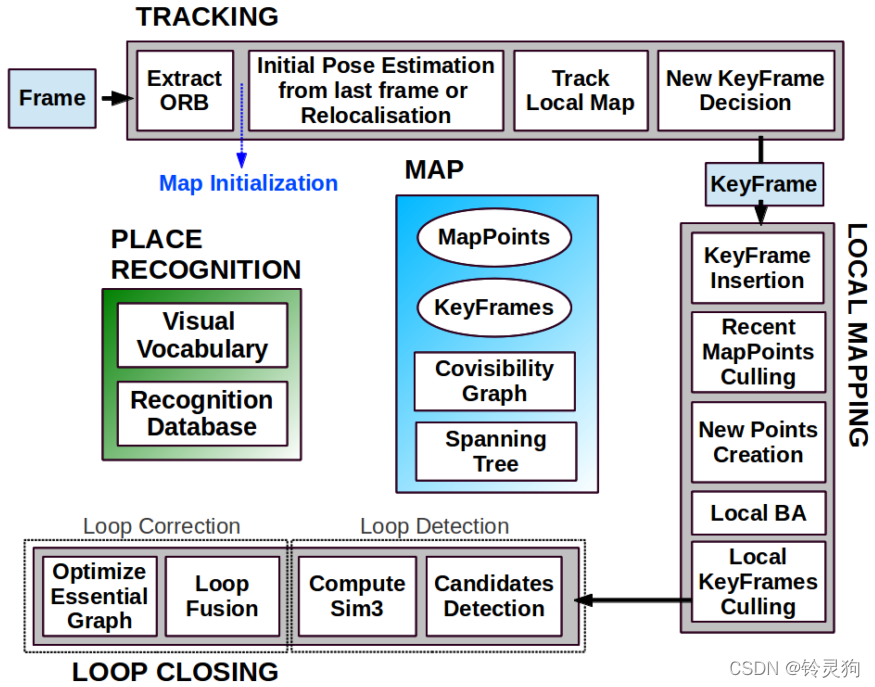
三大线程:跟踪线程(主线程)、局部建图线程、回环检测线程
步骤
- ORB 特征点提取
- 相机初始化
- 根据前一帧图片估计出当前帧的位姿
- 基于当前帧的位姿构建出局部地图 局部地图的作用是优化当前帧的位姿
- 决定是否生成关键帧
单目相机初始化
成功条件
连续两帧间成功三角化超过100个点,则初始化成功
初始化帧即为参考帧 第二帧的特征点个数要大与100
单目相机初始化器
当特征点共面或者相机发生纯旋转时 基础矩阵的自由度下降 如果此时继续使用基础矩阵进行求解 则求解结果会极大的受到噪声的影响 为了避免这种情况的发生 本算法采用H和F同时计算的方法 选取卡方检验得分较高的那个结果
单目相机初始化步骤:
- 若单目相机初始化器还没创建,则创建初始化器
- 若上一帧特征点数量足够但是当前帧的特征点数量过少 则匹配失败 删除初始化器
- 在初始化帧和当前帧进行特征匹配
- 若匹配的特征点数目太少,则匹配失败,删除初始化器
- 进行单目初始化
- 创建初始化地图
初始化后续
- 将两个关键帧插入地图
- 处理所有的地图点&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 3406
3406

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











