










 本文详细介绍了CAN硬件电路设计,包括CAN电平转换的必要性,120Ω终端电阻的作用,以及EMC设计方案中的防静电和PCB设计技巧。涉及CAN2.0B规范和TJA1050芯片的应用。
本文详细介绍了CAN硬件电路设计,包括CAN电平转换的必要性,120Ω终端电阻的作用,以及EMC设计方案中的防静电和PCB设计技巧。涉及CAN2.0B规范和TJA1050芯片的应用。
视频链接
CAN电路设计
1、CAN简介
CAN:局域网(Control Area Network,CAN)是一种全数字、全开放的现场总线控制网络。目前CAN总线被广泛的应用在汽车电子领域和工业的现场总线中。
硬件电路设计核心:
单片机的电平是TTL电平;CAN的电平是以CANH、CANL两线之间的差分电压定义的;TTL电平与CAN电平不兼容;所以在设计电路的时候,必须要电平转换!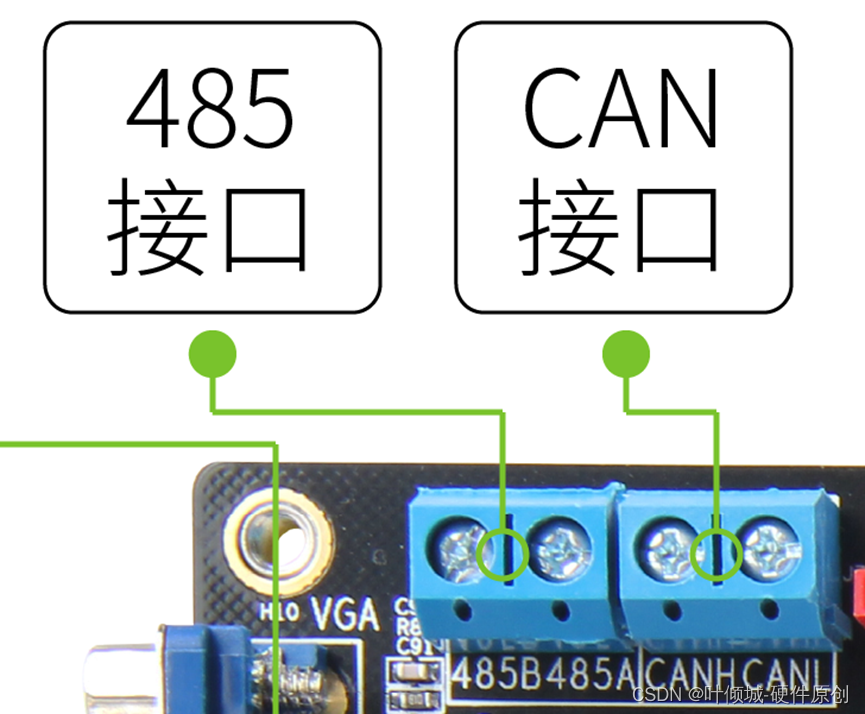
2、CAN电平
CAN控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐形电平,总线必须处于两种电平之一。发送方通过使总线电平发生变化,将消息发送给接收方。
CAN 接口电平差分:
CAN2.0B规范定义了两种互补的逻辑数值:显性和隐性。同时传送显性和隐性位时,总线呈现显性状态;同时传送显性状态位时,总线呈现显性状态;同时传送隐性状态位时,总线呈现隐性状态。显性数值表示逻辑0,隐性数值表示逻辑1。
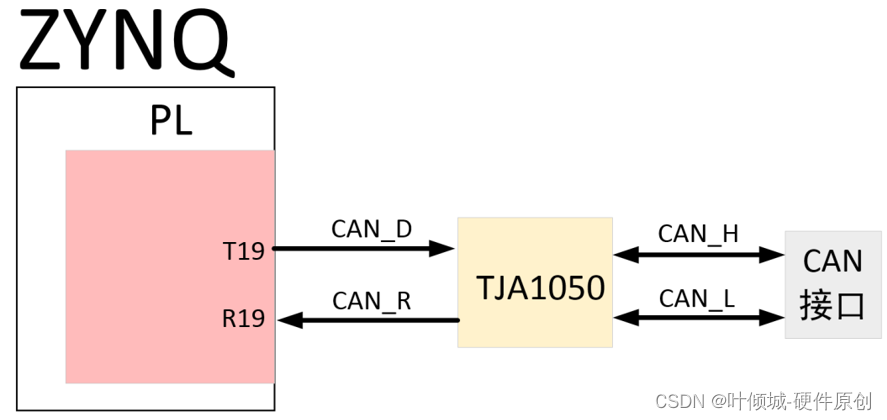
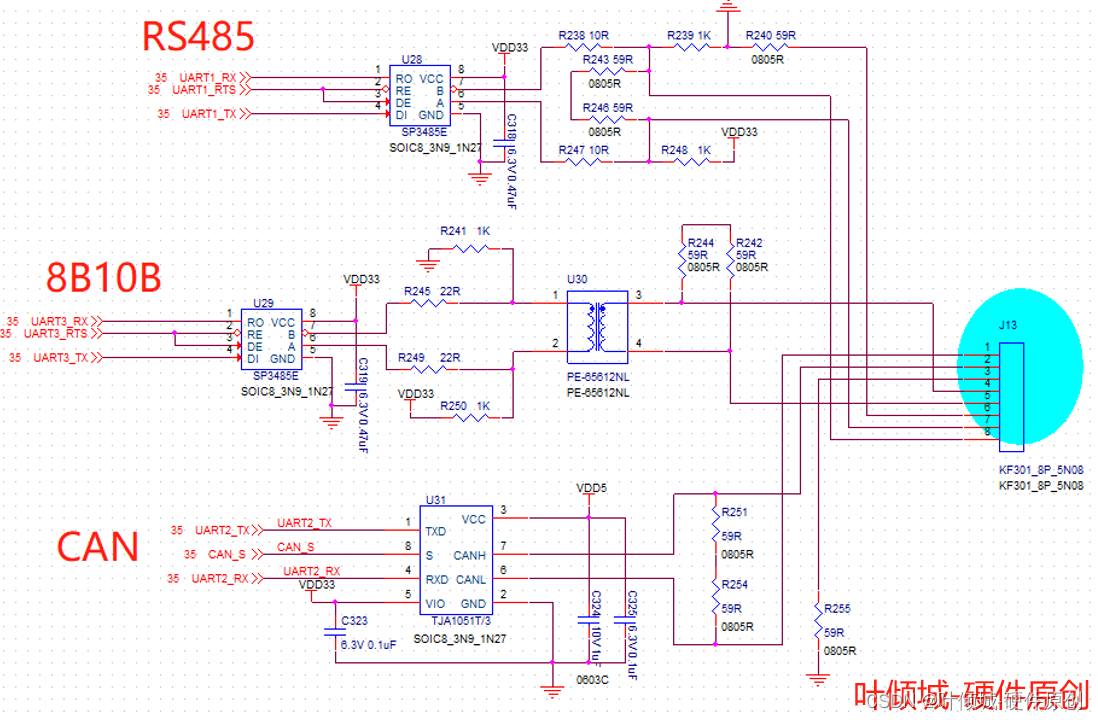
CAN 收发器芯片,型号为TJA1050 芯片。该芯片是控制器区域网络(CAN)协议控制器和物理总线之间的接口芯片。该器件为总线提供差分发射能力并为CAN 控制器提供差分接收能力。CAN接口与ZYNQ PL 之间的连接框图如下图所示:
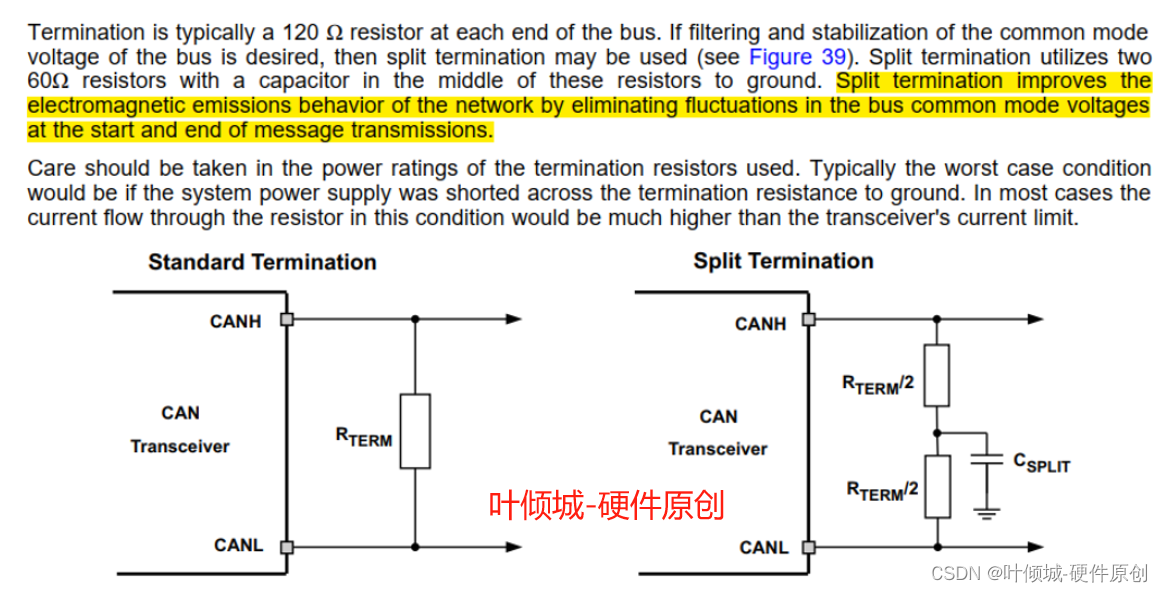
CAN总线为什么要有120Ω的终端电阻?高频信号传输时,信号波长相对传输线较短,信号在传输线终端会形成反射波,干扰原信号,所以需要在传输线末端加终端电阻,使信号到达传输线末端后不反射.对于低频信号则不用。
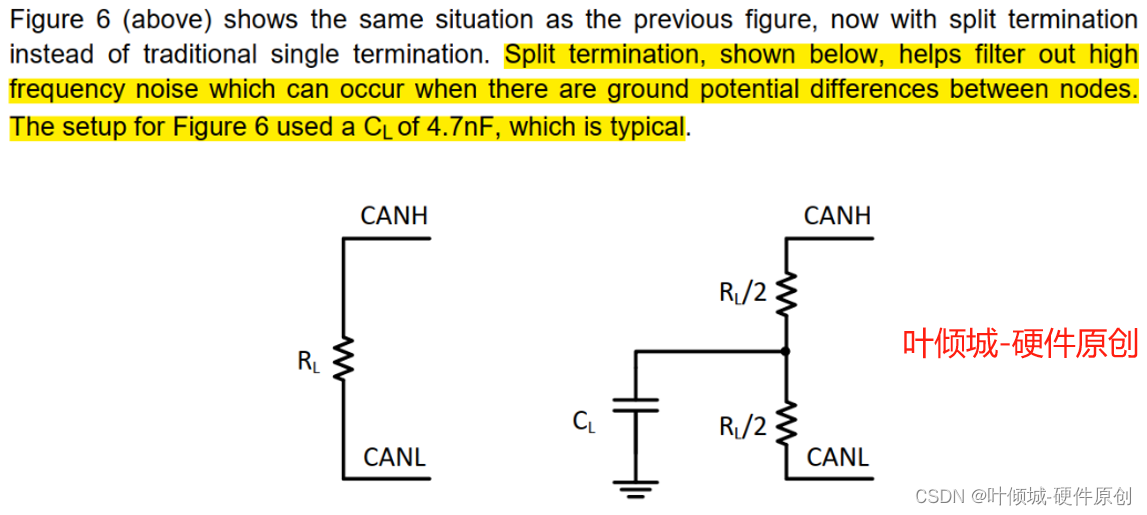
总线的两端各要求有一个端接电阻(120欧)来做阻抗匹配,以减少回波反射。将端接电阻一分为二(120/2=60欧)再接电容(通常是4.7nF)到GND,这样有助于滤波总线上的共模干扰。
3、CAN接口电路的EMC设计方案
1. CAN接口防静电设计
电路EMC设计说明:
(1)电路滤波设计要点:
L1为共模电感,用于滤除差分线上的共模干扰,其阻抗选择范围为120Ω/100MHz ~2200Ω/100MHz,典型值选取600Ω/100MHz;
C1、C2为信号线上的滤波电容,给干扰提供低阻抗的回流路径,容值选取范围为22PF~1000pF,典型值选取100pF;
C3为接口地和数字地之间的跨接电容,典型取值为1000pF,耐压要求达到2KV以上,C3容值可根据测试情况进行调整;
(2)电路防护设计要点:
D1、D2为瞬态抑制二极管,典型选值要求反向关断电压3.5V以上;因为TVS只是用来静电防护,TVS的功率不作要求。TVS管的结电容对信号传输有一定的影响,CAN接口推荐使用结电容小于100pF的TVS管。
4、硬件实战
5、PCB设计方案
1、为了抑制内部单板高频噪声通过接口向外传导辐射,也为了增强单板对外部干扰的抗扰能力。在CAN接口处增加防护和滤波隔离器件,并以隔离器件位置大小为界,划分出接口地;
2、隔离带中可以选择性的增加电容作为两者地之间的连接,电容取值建议为1000pF;信号线串联共模电感滤波,且共模电感要求置于隔离带内;
3、防护器件及滤波器件要靠近接口位置处摆放且要求摆放紧凑整齐,信号线上的防护器件TVS管与滤波电容要下接至接口地;按照信号流向摆放器件,走线时要尽量避免走线曲折的情况;
4、共模电感及跨接电容要置于隔离带中。
5、接口及接口滤波防护电路周边不能走线且不能放置高速或敏感的器件;
6、隔离带下面投影层要做掏空处理,禁止走线。

















 9630
9630

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









