










目录
0.前提
近些时间在对睿抗的ROS仿真赛进行小组安排,对小组成员进行了一些安排,也要求他们以本次比赛写下自己的比赛经历博客,他们的培训由我来安排和负责,因此我得加吧油,起码保证我的进度得快过他们,才能安排好本次比赛。好了扯了这么多,进入重点,拉普拉斯变换和PID调节都是能在本科学习期间的自动控制原理当中看到,甚至自控是很多人考研时感到最头疼的科目之一,同时也是为了能更好的调节vesc。

1.拉普拉斯变换
1.拉氏变换概念
在自控中有个弹簧-增块-阻尼器系统,其微分方程如下图:
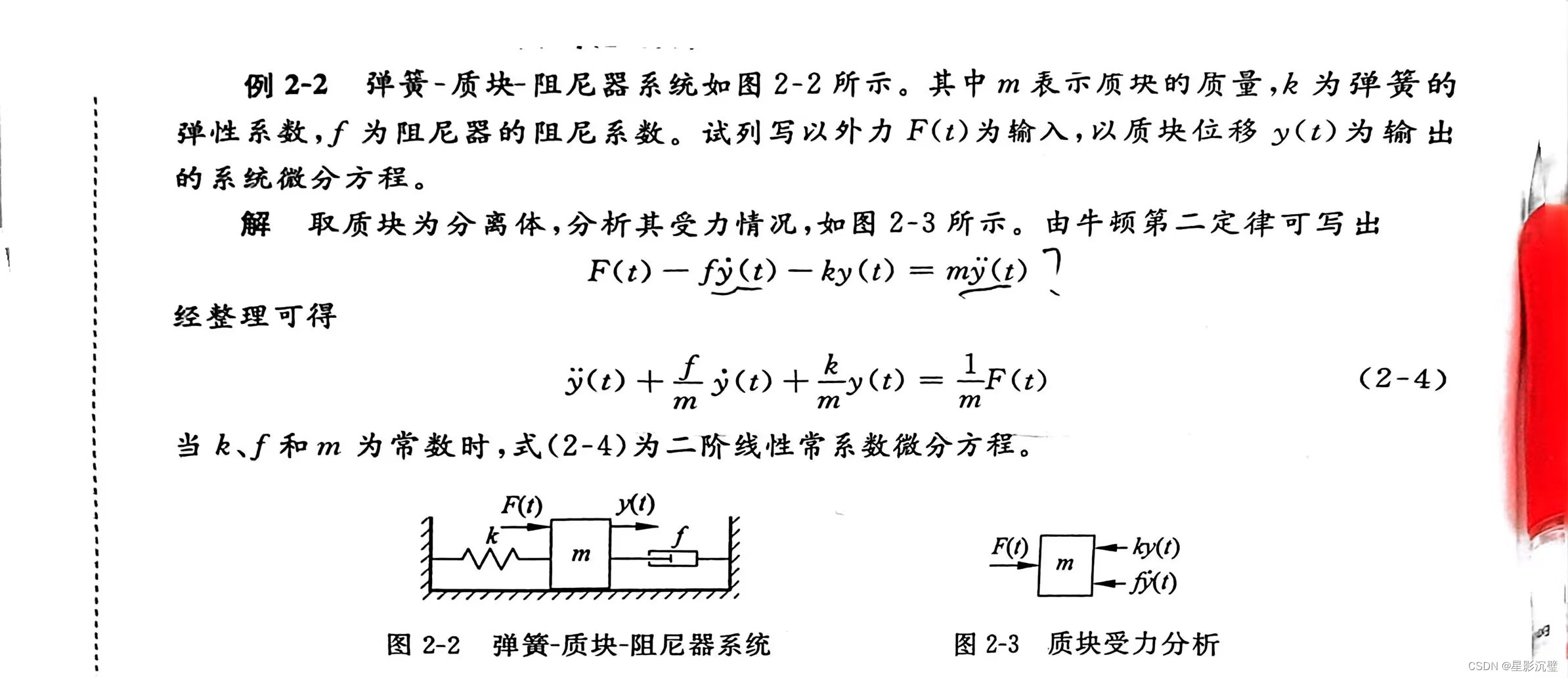
我简单解释一下这个方程,用牛二可知,根据大学物理知识可知
、
,而y上面的点代表的就是求导。在时域当中求解这个微分方程是相当麻烦的,而拉普拉斯变换给我们提供了一个将时域系统转变为频域系统的方式。

在复变函数(如果没有复变基础请自己去寻找书籍学习一下)中有一个章节来单独对拉普拉斯变换进行了讲解,不过好像在上复变的时候老师都没讲这一章内容,反倒在自控中老师单独花了时间来讲,在上图的拉普拉斯变换的定义中我们可以看到拉普拉斯积分公式:

 反演公式就是拉氏反变换
反演公式就是拉氏反变换
或
在公式中我们将时域 转 变为频域
。而
是
的拉氏逆变换,记为:
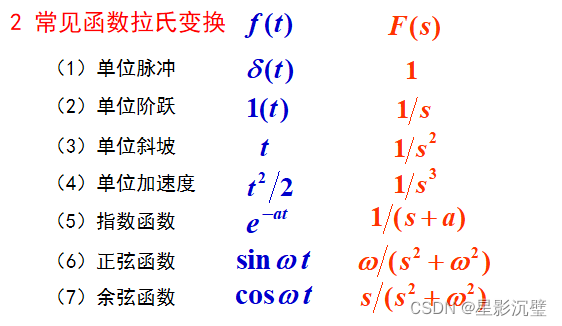
2.常见的拉氏变换
1.阶跃函数
2.指数函数
3.正弦函数
其余的常见拉氏变换我用图片放出来,其实记住上面的定义式都可以自己计算出来,唯一值得注意的就是复变里面的
:
3.拉氏变换几个重要性质
在拉氏变换中有几个重要的性质,为了方便我同样只放图片:

2.PID
自控当中有介绍到PID(比例-积分-微分控制器),利用系统误差、误差的微分和积分信号构成控制规律,PID控制器采用不太组合可实现PD,PI,PID这3种矫正方式。
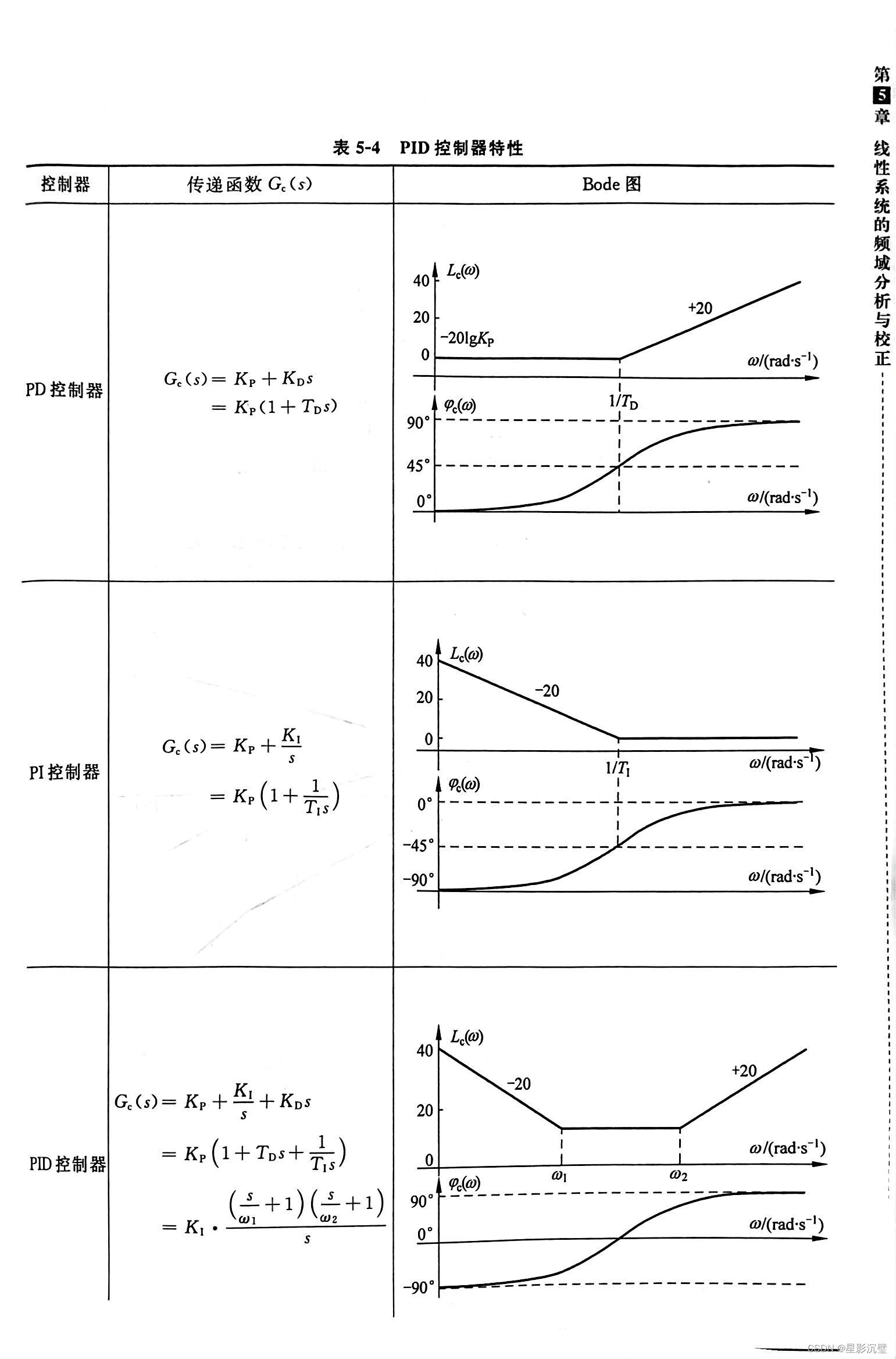 图1
图1
1.P控制(比例控制)和P控制器
1.P控制
这里的P取之英文单词Porportional的首字母译为比例的。
在ros小车循迹中的转向和转向偏差要成比例这就是P比例控制:
 图2
图2
小车循迹时,我们希望它的速度是平行于道路的,且始终位于道路中心,但因为误差的原因我们无法保证按照理想运行,因此我们按照比例控制来矫正。
1.核心思想:
,理论值减实际值得的误差。
误差越大,用于矫正误差的输入就越大。
2.公式:
2.P控制器
1.核心思想:
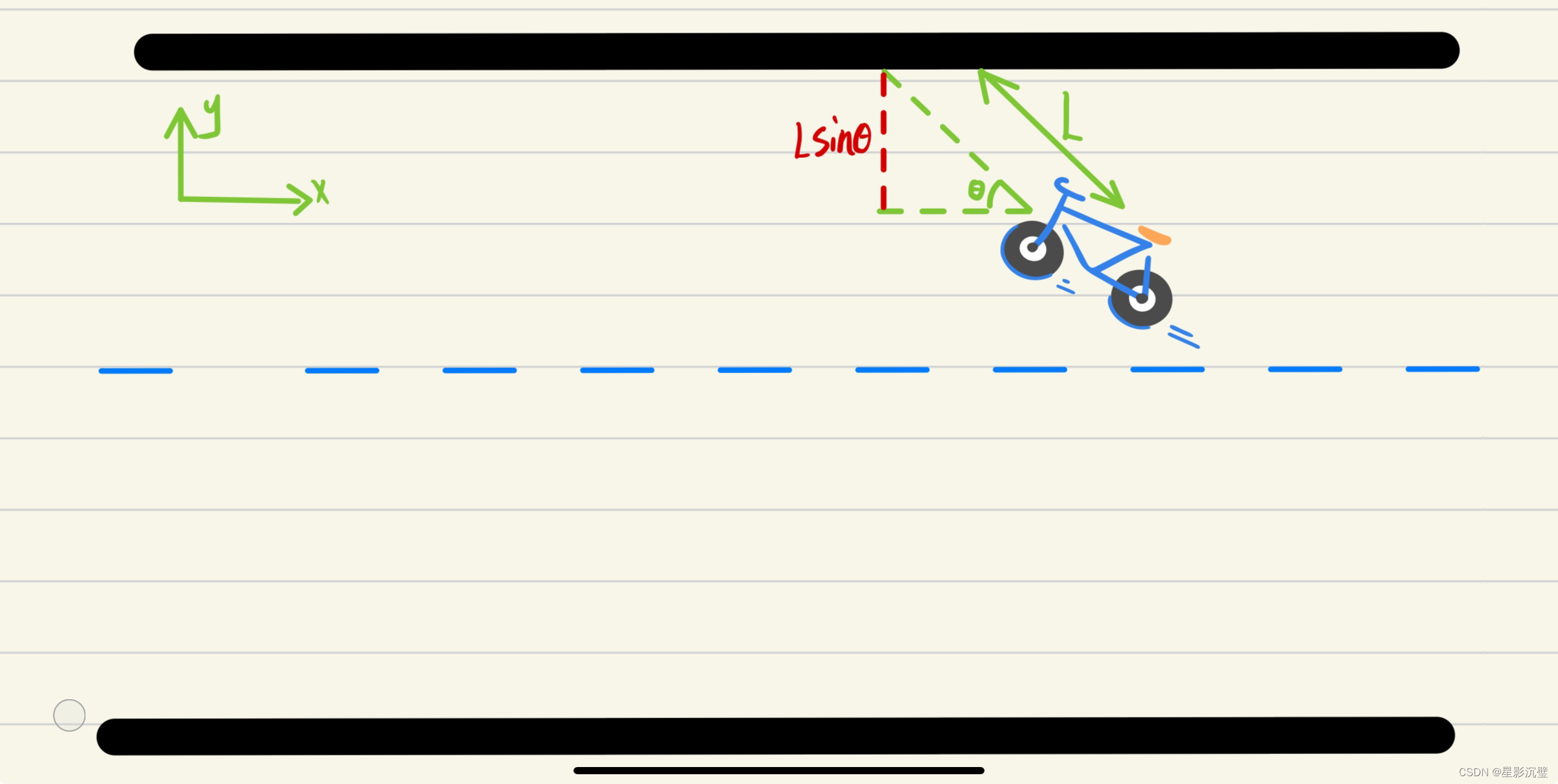 图3
图3
当前小车的运动状态如上图蓝线为道路中间线,当我们保证小车速度不变,我们需要的转向角为,我们的目的是要保证小车运动在道路中间
,
也就是
。
再结合图2我们就可以得到
注意:小车的运动方向会影响和
的取值,受坐标系构建的影响。
1.左转::小车在道路右边——>左转:
:小车左转L米——>左转:
2.右转::小车在道路左边——>右转:
:小车右转L米——>右转:
2.转向角度:
小车应用P控制器的运动轨迹:
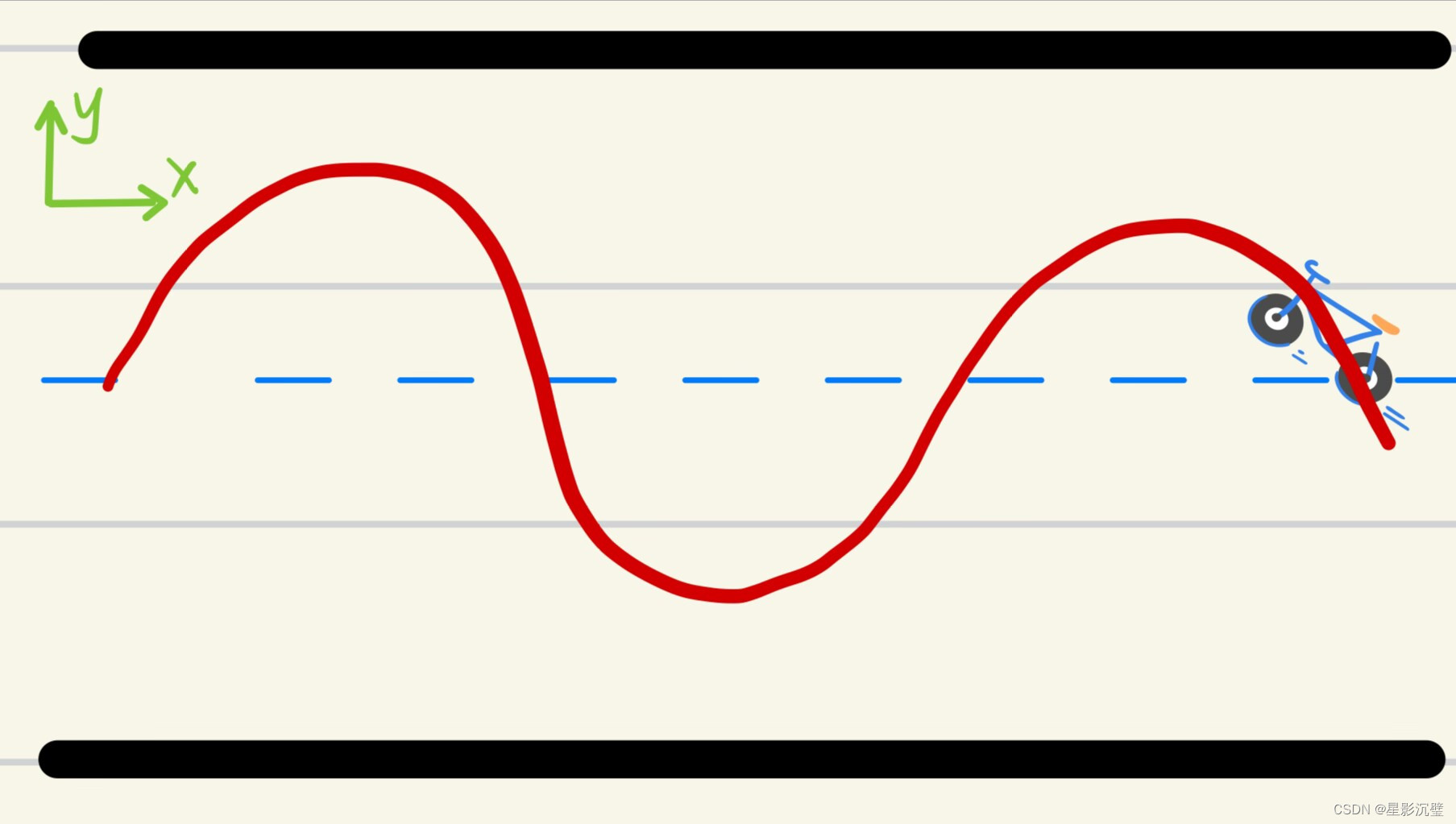 图4
图4
2.D控制(微分控制) 与PD控制器
1.D控制
这里的D取之英文单词Derivativel的首字母译为微分的。
观看图4可知道仅引入P控制时,我们的小车会在中心线附近摆动,为了出现这种超调现象,我们需要更快的做出调整反应。这时我们引入了D控制,D控制具有超前矫正的作用。
1.核心思想:
D控制预测反馈误差信号的变化趋势(预测基于误差的导数增益)。这里的
和P控制里面的
是同一个。
2.公式:
2.PD控制器
1.核心思想
D控制和P控制共同组成了PD控制。
2.转向角度
小车PD控制运动轨迹:
 图5
图5
3.I控制(积分控制)和PID控制器
1.I控制
这里的I取之英文单词Integral的首字母译为积分的。I控制具有滞后和稳定作用。
1.核心思想:
稳态误差随时间积累,I控制提高系统稳定精度。
2.公式:
,这里的
和P控制里面的
是同一个。
2.PID控制器
1.核心思想:
I控制加入PD控制,会得到PID控制
2.转向角度:
误差牺牲
小车PID控制运动轨迹(红色为PID控制器的运动轨迹,紫色是PD控制器的运动轨迹):
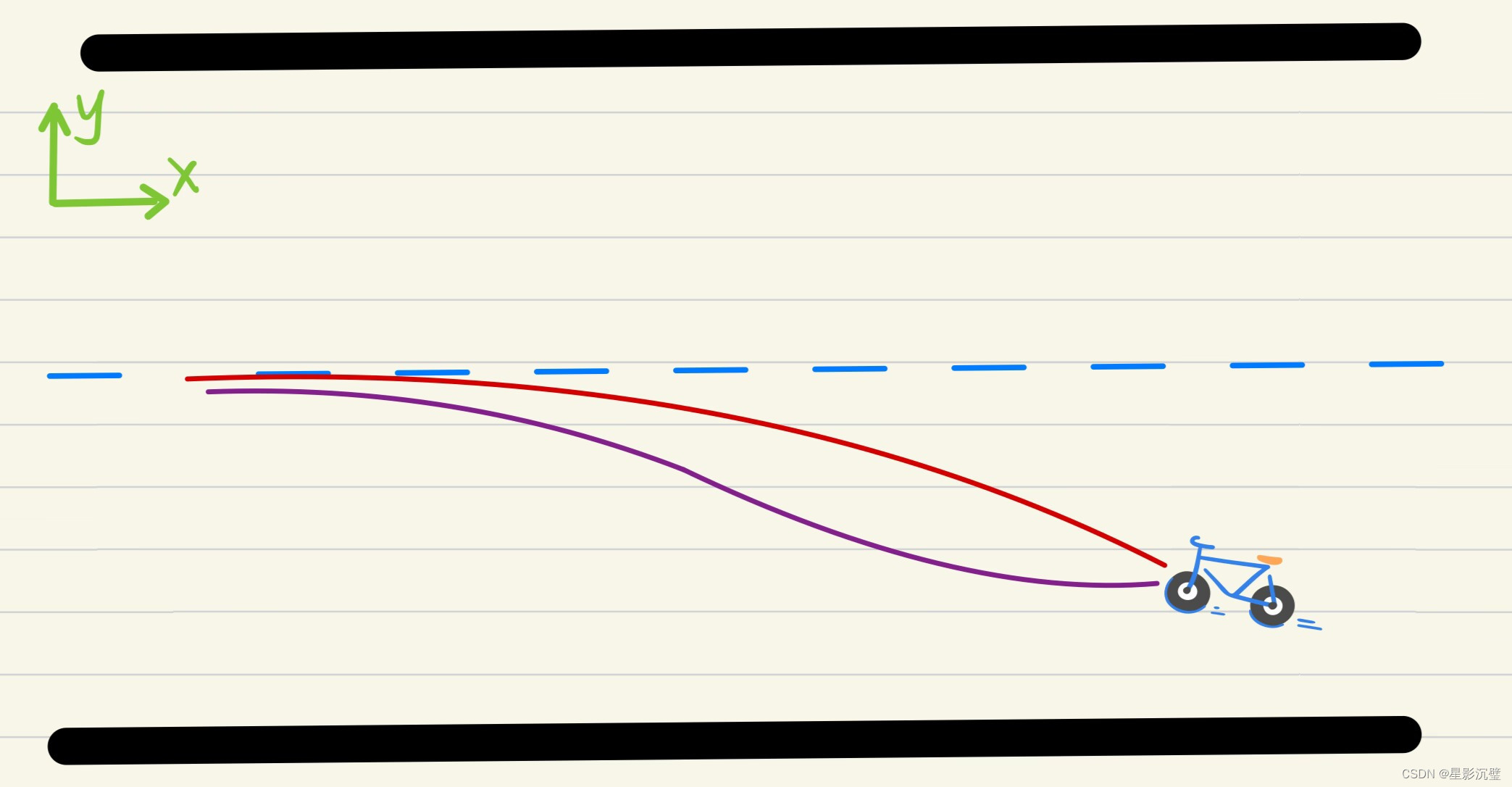 图6
图6
其实本来还应该有个PI控制器的,但我们的核心是PID控制器嘛,所以能得出PID控制器就好了,现在回头看PID的图1,会不会有新的思考?
我又在维基百科上找了一个小视频帮助大家认识PID

3.巡墙驾驶理论
在PID当中我们提到牺牲误差,那实际运用当中我们要如何得到牺牲误差呢?在何时去获取误差(这是一个时域问题)?
回答:我们可以在当前时间利用雷达获取到右墙的距离,而现在这个时刻的距离认为是
,参看下图将小车当前速度设定为
,与速度垂直的角度测得到墙距离
,距离
与
轴的角度为
,在该角度的基础上叠加一个角度
(
),测出一个距离
。

按下图我们可以计算出角度,这时我们也就知道了当前时刻我们所在的位置

既然我们得到了车和墙现在的距离,那我们设置一个我们的期望值(车和墙的距离),计算牺牲误差
,在低速档的时候按照这个方式计算转向是完全ok的,但当我们小车行驶在超高速度时(雷拉洛的AK-787极速能达到260km/h!),按照这样的测距方式是来不及的,换而言之,在工业上这时不安全的,我们更希望超前预测计算距离。
按下图,我们假设小车按当前速度会向前行驶一段距离,那我们计算的牺牲误差将会是

4. ROS实现巡墙驾驶关键解析
在PID计算中我们需要用到积分与微分,但在实际代码工程中如何实现积分和微分的计算呢?
1.微分(D控制器)
1.导数的定义
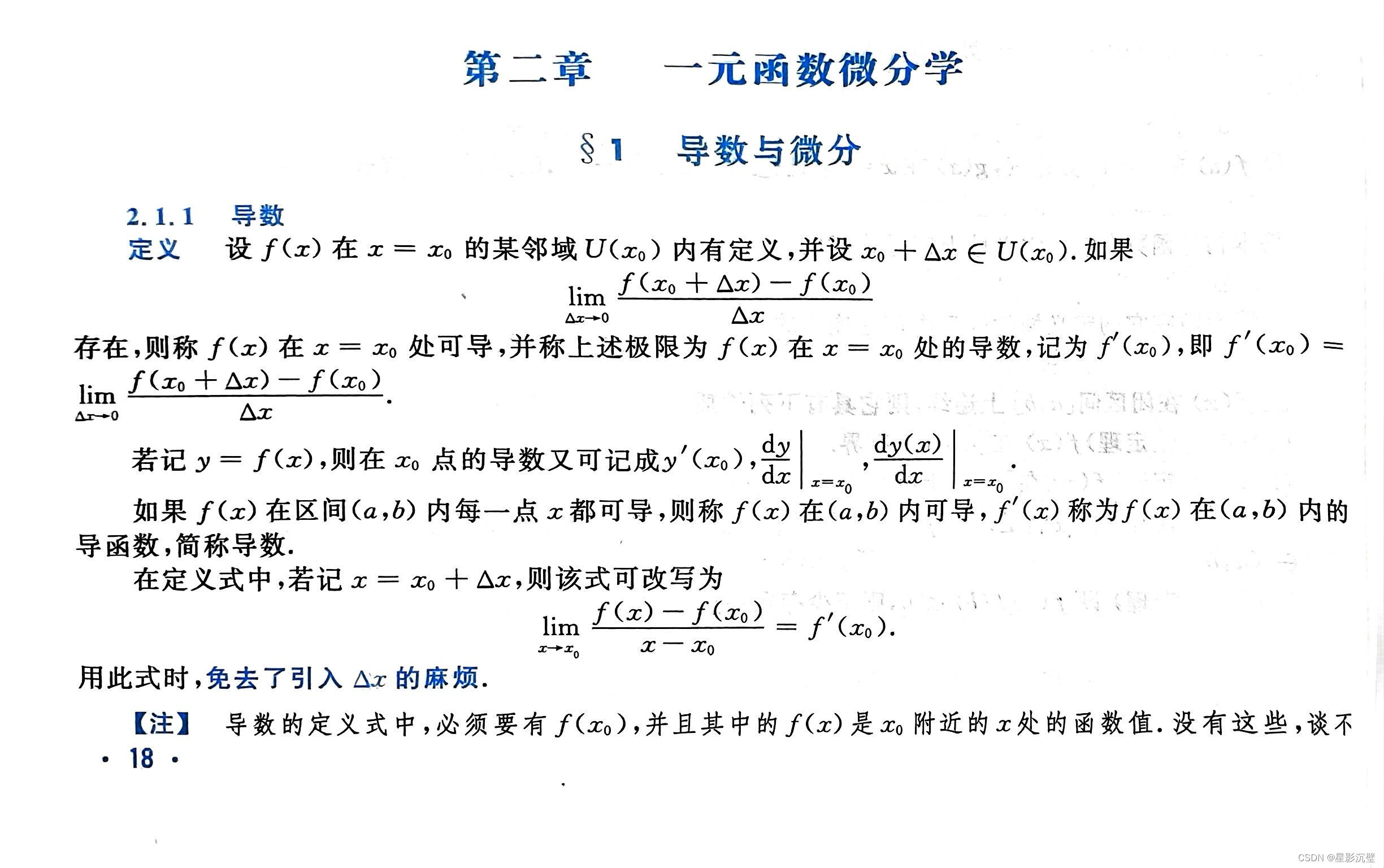
导数其实本质上就是关于的函数
和
间的除法关系求极限。
2.D控制器公式
换个方式表达:
其中表示当前时间,
表示之前时间。涉及到时间的函数在ROS中如何获取?
这里我只给出c++的ROS获取当前时间:
roscpp/Overview/Time - ROS Wiki
2.积分(I控制器)
1.积分的定义
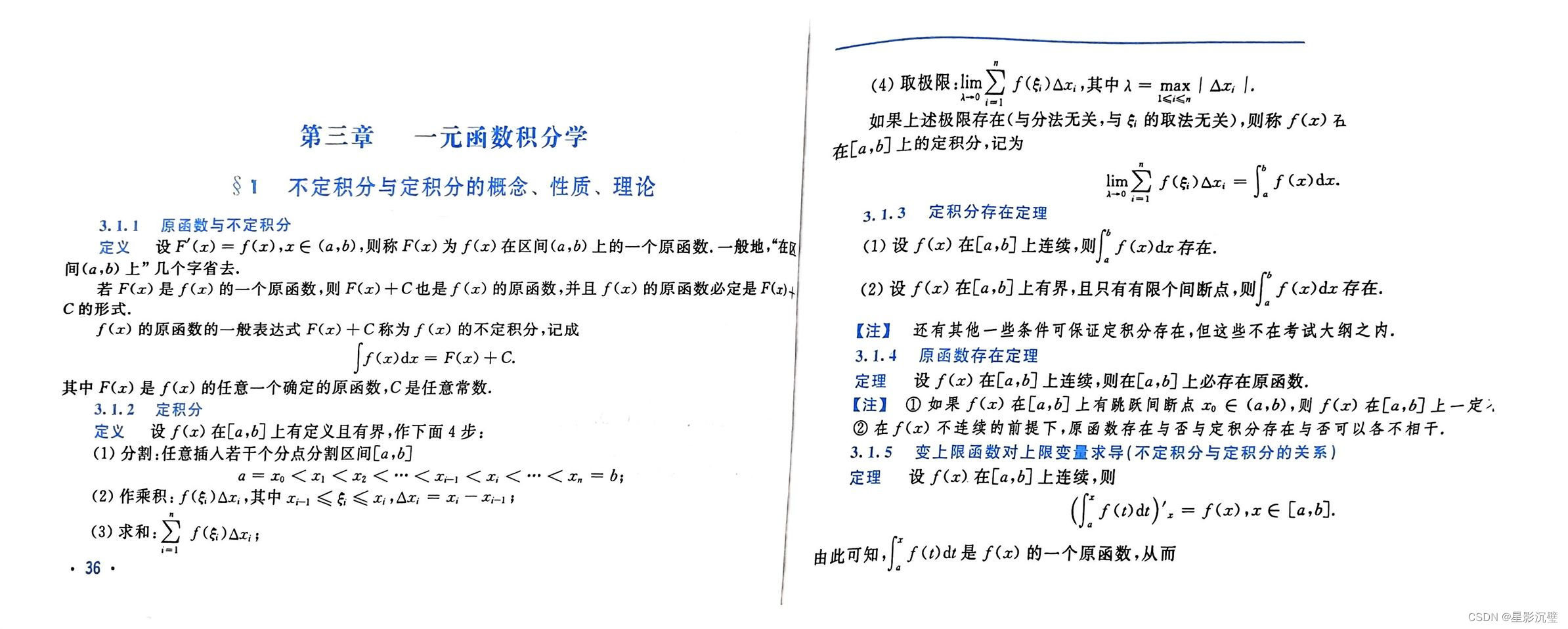
积分其实本质上就是关于的函数
和
间的乘法法关系和求极限。
2.积分控制器公式
换个方式
其中表示当前时间,
表示之前时间。
3.PID
最后的PID公式
转向角:
其中表示当前时间,
表示之前时间。
误差牺牲:
5.总结
好了PID的理论和一些代码思路我就讲到这里了,接下来就是大家自己去实践了。
这里是我的演示视频:wall_follow_哔哩哔哩_bilibili
这玩意越看越像bug算法。















 1541
1541











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









