









考虑一个在三维平面x—y—z内运动的质点M,其在某一时刻A的位置、速度和加速度可用矢量表示为∶
X
(
k
)
=
[
r
x
(
k
)
r
y
(
k
)
r
z
(
k
)
v
x
(
k
)
v
y
(
k
)
v
z
(
k
)
a
x
(
k
)
a
y
(
k
)
a
z
(
k
)
]
X(k)= [r_x(k) \quad r_y(k) \quad r_z(k) \quad v_x(k) \quad v_y(k) \quad v_z(k) \quad a_x(k) \quad a_y(k) \quad a_z(k) ]
X(k)=[rx(k)ry(k)rz(k)vx(k)vy(k)vz(k)ax(k)ay(k)az(k)]
质点M可以在三维空间内做任何运动,同时假设三个x—y—z 方向上运动具有加性系统噪声
W
(
k
)
W(k)
W(k),则在笛卡儿坐标系下该质点的运动状态方程为∶
X
(
k
+
1
)
=
f
(
X
(
k
)
,
W
(
k
)
)
X(k+1)=f(X(k),W(k))
X(k+1)=f(X(k),W(k))
通常情况下,上述方程为线性的,即能表示为如下方式∶
X
(
k
+
1
)
=
Φ
X
(
k
)
+
T
U
(
k
)
+
W
(
k
)
X(k+1)= \Phi X(k)+\Tau U(k)+W(k)
X(k+1)=ΦX(k)+TU(k)+W(k)
考虑一个带有观测器的飞行中的导弹。假设其为质点 M。对移动的目标进行观测。导弹与目标的相对位置依然可用x—y—表示,如图 所示。
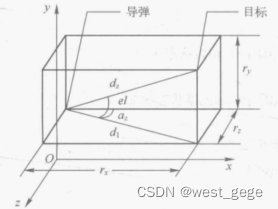
导弹对目标采用纯方位角观测,观测量为俯仰角和水平方向偏向角、实际测量中雷达具有加性测量噪声
V
(
k
)
V(k)
V(k),在笛卡儿坐标系下,观测方程为
X
(
k
+
1
)
=
h
[
X
(
k
)
]
+
V
(
k
)
X(k+1)=h[X(k)]+V(k)
X(k+1)=h[X(k)]+V(k)
式中∶
h
[
X
(
k
)
]
=
[
arctan
r
y
(
k
)
r
x
2
(
k
)
+
r
y
2
(
k
)
arctan
−
r
x
(
k
)
r
z
(
k
)
]
T
h[X(k)]=[\arctan{\frac{r_y(k)}{\sqrt{r^2_x(k)+r^2_y(k)}}} \quad \arctan\frac{-r_x(k)}{r_z(k)}]^T
h[X(k)]=[arctanrx2(k)+ry2(k)ry(k)arctanrz(k)−rx(k)]T
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%% %%%%%%%%%%%
% 程序说明:目标跟踪程序,实现运动弹头对运动物体的三维跟踪,主函数
%状态方程:x( t)= Ax( t-1)+Bu( t-1)+w(t)
%。参考资料:《寻的导弹新型导引》第5.5和5.6节中仿真参数设置
%%%%%%% %%%%%%%%%% %%%%%%%%%% %% %%%% %%%%%%%%%% %%%function main
%%%%%%%%%%% %%% %%%%%% %%%%%%% %%%%%% % %% %%%%%%%%%%
delta_t=0.01; %测量周期,采样周期
longa= 10000; %机动时间常数的倒数,即机动频率
tf=3.7;
T= tf/ delta_t;%时间长度3.7秒钟,一共采样T=370次
%状态转移矩阵fai
F=[eye(3) , delta_t * eye(3) , ( exp(-1 * longa * delta_t )+...
longa * delta_t-1 ) / longa^2 * eye(3);
zeros( 3 ) , eye( 3 ) , ( 1-exp(-1 * longa * delta_t) ) /longa * eye( 3 );
zeros( 3 ) , zeros( 3 ) , exp(-1 * longa * delta_t) * eye( 3 )];
%控制量驱动矩阵gama
G=[-1* 0.5 * delta_t^2 * eye( 3 ) ;
-1 * delta_t * eye( 3 ) ;
zeros(3)];
N=3;%导航比(制导律)
%%%%%%%%%%%%%%% %% %%% %%%%%%%%%%%%%% % %%%%% % %%%
% u= 10 * ones( 3,T);
for i= 1 :50 %做50次蒙特卡罗仿真
x =zeros ( 9,T);
x( :, 1)= [ 3500,1500,1000,-1100,-150,-50,0,0,0]';%初始状态X(0)
ex =zeros( 9,T);
ex(:, 1 )= [ 3000 , 1200,960,-800 ,-100,-100,0,0,0]'; %滤波器状态Xekf(0)
cigema= sqrt( 0.1);
w = [ zeros( 6,T) ; cigema * randn( 3,T)];%过程噪声
Q = [ zeros( 6) , zeros( 6,3 ); zeros(3,6) , cigema^2 * eye( 3) ];
z=zeros( 2,T); %观测值
z( :,1)= [atan(x(2,1)/sqrt(x(1,1)^2+x(3,1)^2) ), atan(-1 * x(3,1)/x(1,1))]';
v=zeros(2,T);%观测噪声
for k=2:T-3
tgo= tf-k*0.01+0.0000000000000001;
c1=N/tgo^2;%制导律的系数
c2=N/tgo; %制导律的系数
c3=N* ( exp(-longa * tgo )+longa * tgo-1 )/ ( longa * tgo) ^2;%制导律的系数
% X,Y,Z三个方向的导弹加速度
u( 1,k-1)=[ c1 , c2, c3]*[x( 1,k-1), x(4, k-1), x( 7,k-1)]';
u( 2,k-1)=[ c1 , c2, c3]*[x( 2,k-1), x(5, k-1), x( 8,k-1)]';
u( 3,k-1)=[ c1 , c2, c3]*[x( 3,k-1) ,x(6, k-1), x( 9,k-1)]';
x( : ,k)=F* x( : ,k-1)+G * u( : ,k-1 )+w( : ,k-1);%目标状态方程
d= sqrt(x(1,k)^2+x( 2,k)^2+x( 3,k)^2);
D= [ d,0;0,d];%参考书中公式
R=inv( D)* 0.1 * eye( 2 ) * inv(D)' ; %观测噪声方差
v( : ,k )= sqrtm(R) * randn(2,1);%观测噪声模拟%目标观测方程
z( : ,k )= [ atan( x(2,k) / sqrt(x(1 ,k)^2+x(3,k)^2) ),...
atan(-1*x(3,k)/x( 1,k))]'+v( : ,k ) ;
end
% 下面根据观测值开始滤波
P0=[ 10^4 * eye( 6 ) , zeros(6,3 ) ; zeros( 3,6) ,10^2 * eye(3 ) ];%协方差初始化
eP0=P0;
stop=0.5/0.01;
span= 1/0.01 ;
for k=2:T-3
dd= sqrt(ex( 1,k-1)^2+ex(2,k-1)^2+ex(3,k-1)^2);
DD= [ dd,0;0,dd];
RR=0.1 * eye(2)/ ( DD * DD') ;
tgo = tf-k *0.01+0.0000000000000001 ;
c1 =N/tgo^2;
c2=N/tgo;
c3=N * ( exp( -longa*tgo ) +longa * tgo-1 ) / ( longa * tgo)^2;
u( 1,k-1)= [c1 , c2,c3] * [ ex( 1,k- 1 ) , ex( 4 ,k-1 ) , ex( 7,k-1)]';
u( 2,k-1)= [c1 , c2,c3] * [ ex( 2,k- 1 ) , ex( 5 ,k-1 ) , ex( 8,k-1)]';
u( 3,k-1)= [c1 , c2,c3] * [ ex( 3,k- 1 ) , ex( 6 ,k-1 ) , ex( 9,k-1)]';
%调用扩展卡尔曼算法子函数
[ ex( : ,k ) , eP0] =ekf(F,G,Q, RR , eP0 , u( : , k- 1 ) ,z( : , k ) ,ex( : ,k-1 ) ) ;
end
for t= 1:T-3%求每个时间点误差的平方
Ep_ekfx( i , t )= sqrt( ( ex( 1,t)-x( 1 ,t))^2);
Ep_ekfy( i ,t )= sqrt ( ( ex(2 , t )-x( 2,t))^2);
Ep_ekfz( i ,t )= sqrt ( ( ex( 3 , t ) -x( 3 , t) )^2);
Ep_ekf( i ,t )= sqrt( ( ex( 1 ,t) -x( 1 ,t) )^2+( ex(2 , t )-x(2,t))^2+( ex( 3,t)-x(3,1))^2 );
Ev_ekf( i , t )= sqrt( ( ex( 4 , t)-x(4, t) )^2+( ex(5 , t)-x(5 ,t))^2+( ex( 6,t)-x(6,t))^2 );
Ea_ekf( i,t ) = sqrt( ( ex( 7, t )-x(7,t ) )^2+( ex( 8 , t)-x( 8,t ))^2+(ex( 9 ,t)-x(9,t))^2 );
end
for t= 1 :T-3 %求误差的均值,即 RMS
error_x( t ) = mean(Ep_ekfx( : ,t ) ) ;
error_y( t )= mean(Ep_ekfy( : ,t ) ) ;
error_z( t ) = mean( Ep_ekfz( : , t ) ) ;
error_r( t ) = mean(Ep_ekf( : ,t ) ) ;
error_v( t ) = mean(Ev_ekf( : ,t ) ) ;
error_a( t )= mean(Ea_ekf( : ,t ) ) ;
end
end
t=0.01 :0.01 :3.67;
figure
hold on; box on ; grid on;
plot3(x( 1, : ) ,x( 2,: ) ,x( 3,: ) ,'-k. ')
plot3( ex( 1 , : ) , ex( 2 , : ) , ex( 3 , : ) ,'-r.' , 'MarkerFace' , 'r')
legend( 'real' , ' ekf') ;
view(3)
title( 'position')
figure
hold on ; box on ; grid on;
plot ( t , error_r, 'b' );
xlabel('飞行时间/s');
ylabel('弹目相对距离估计误差/m');
figure
hold on; box on ; grid on;
plot( t, error_v, 'b');
xlabel( '飞行时间/s');
ylabel('速度估计误差m/s') ;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 函数说明:扩展卡尔曼滤波算法,子函数
%函数参数:ex为扩展卡尔曼估计得到的状态
function [ ex , P0] =ekf( F,G,Q,R , P0, u ,z, ex)
%状态预测
Xn=F* ex+G*u;% 观测预测
Zn= [ atan( Xn( 2)/ sqrt( Xn( 1 )^2+Xn( 3) ^2) ) , atan( -1 * Xn( 3 )/Xn( 1 ) )]';%协方差阵预测
P=F * P0* F'+Q;
%计算线性化的H矩阵
dh1_dx= -1 * Xn(1) * Xn(2)/(Xn( 1 )^2+Xn(2)^2+Xn(3)^2)/ sqrt( Xn( 1 )^2+Xn(3)^2);
dh1_dy= sqrt(Xn( 1)^2+Xn( 3)^2)/ (Xn( 1)^2+Xn( 2) ^2+Xn( 3)^2);
dh1_dz=-1 * Xn(2) * Xn(3)/(Xn( 1)^2+Xn(2)^2+Xn(3 )^2 ) / sqrt(Xn( 1)^2+Xn(3 )^2);
dh2_dx =Xn( 3)/ ( Xn( 1)^2+Xn( 3)^2);
dh2_dy=0;
dh2_dz=-1 * Xn( 1)/(Xn( 1)^2+Xn( 3)^2);
H= [ dh1_dx, dh1_dy , dh1_dz,0,0,0,0,0,0 ;dh2_dx , dh2_dy , dh2_dz,0,0,0,0,0,0];
%kalman增益
K= P*H'/(H*P* H'+R);%状态更新
ex =Xn+K*(z-Zn) ;%协方差阵更新
P0=( eye( 9)-K* H)*P;
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%% % %%















 1469
1469











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









