







系列文章目录
ros系统的安装
ros系统的安装
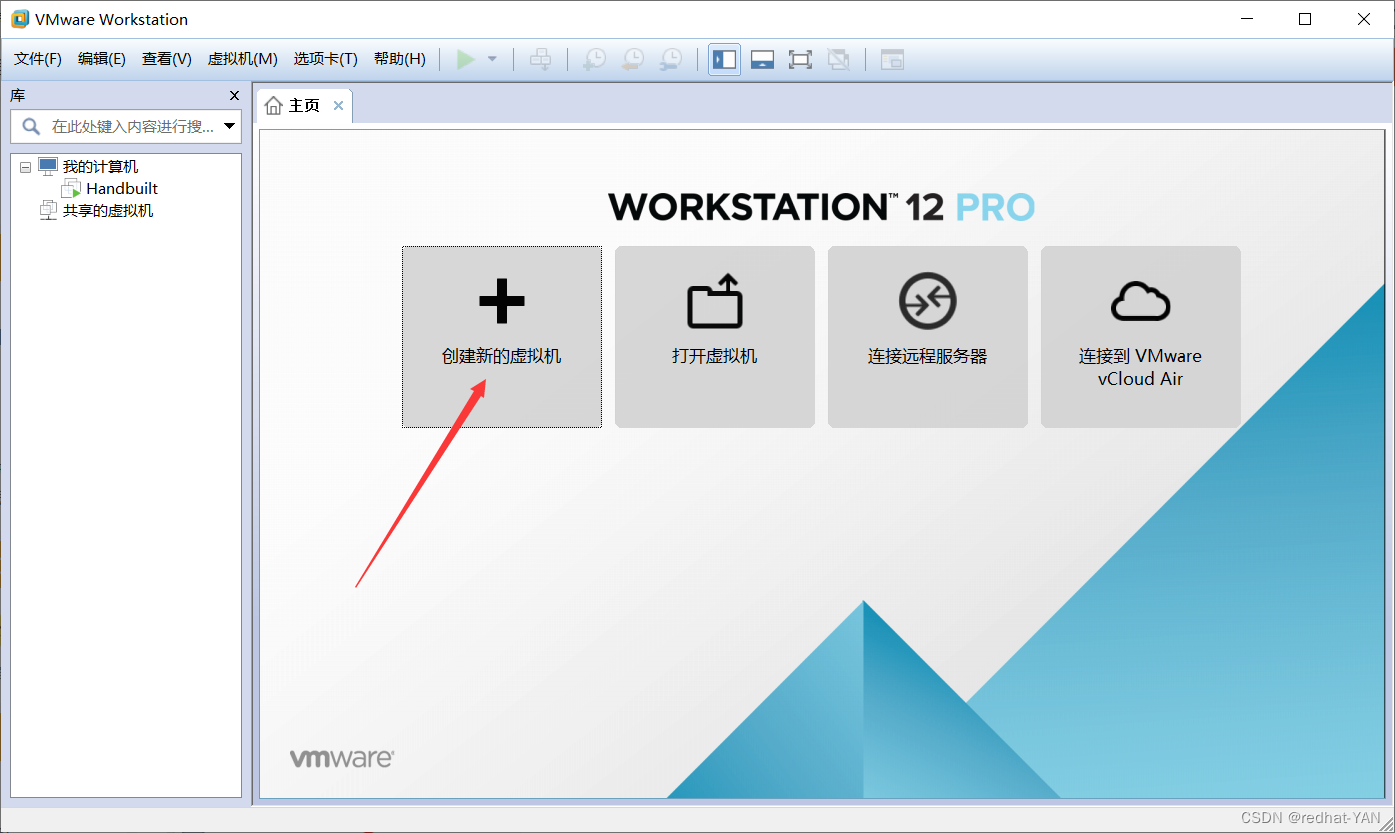
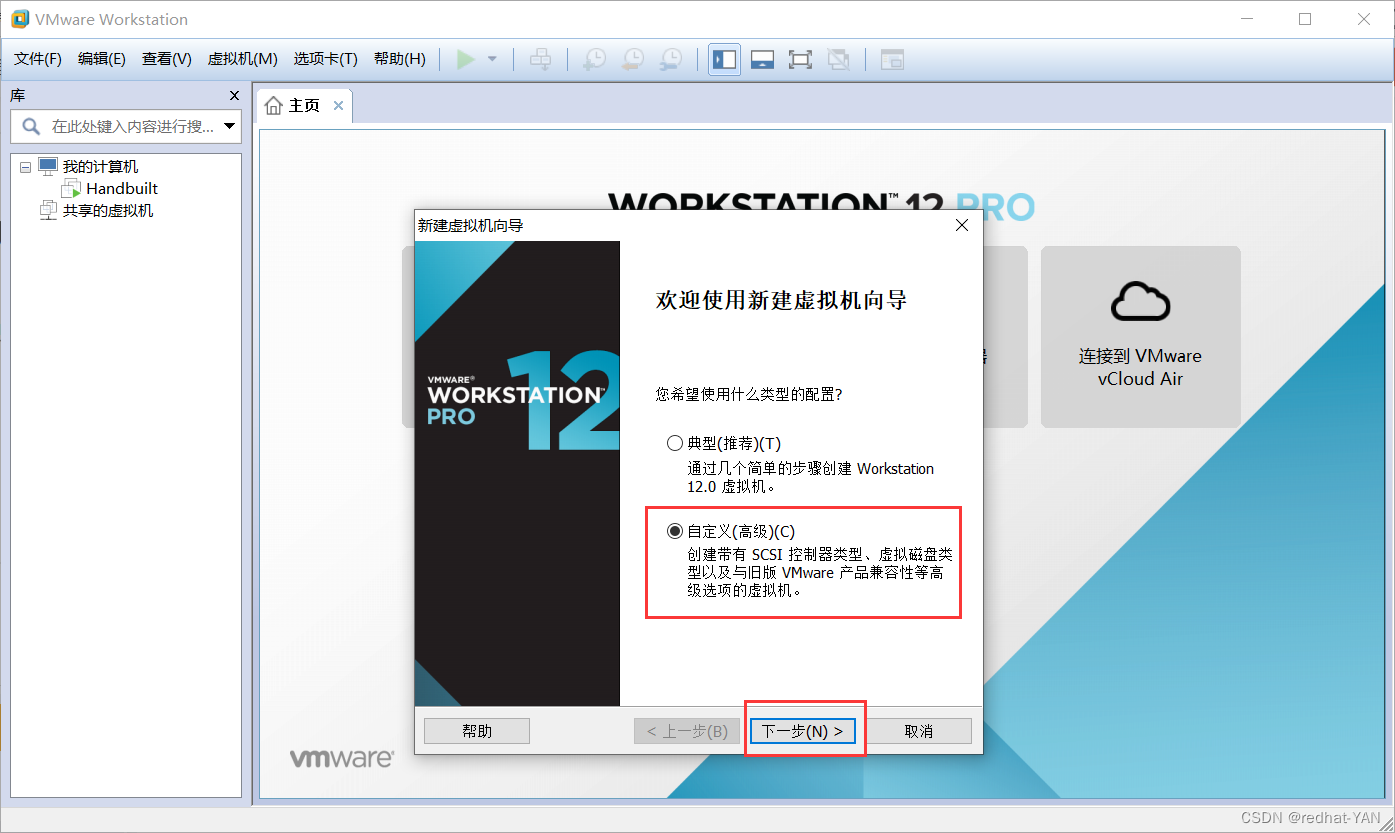
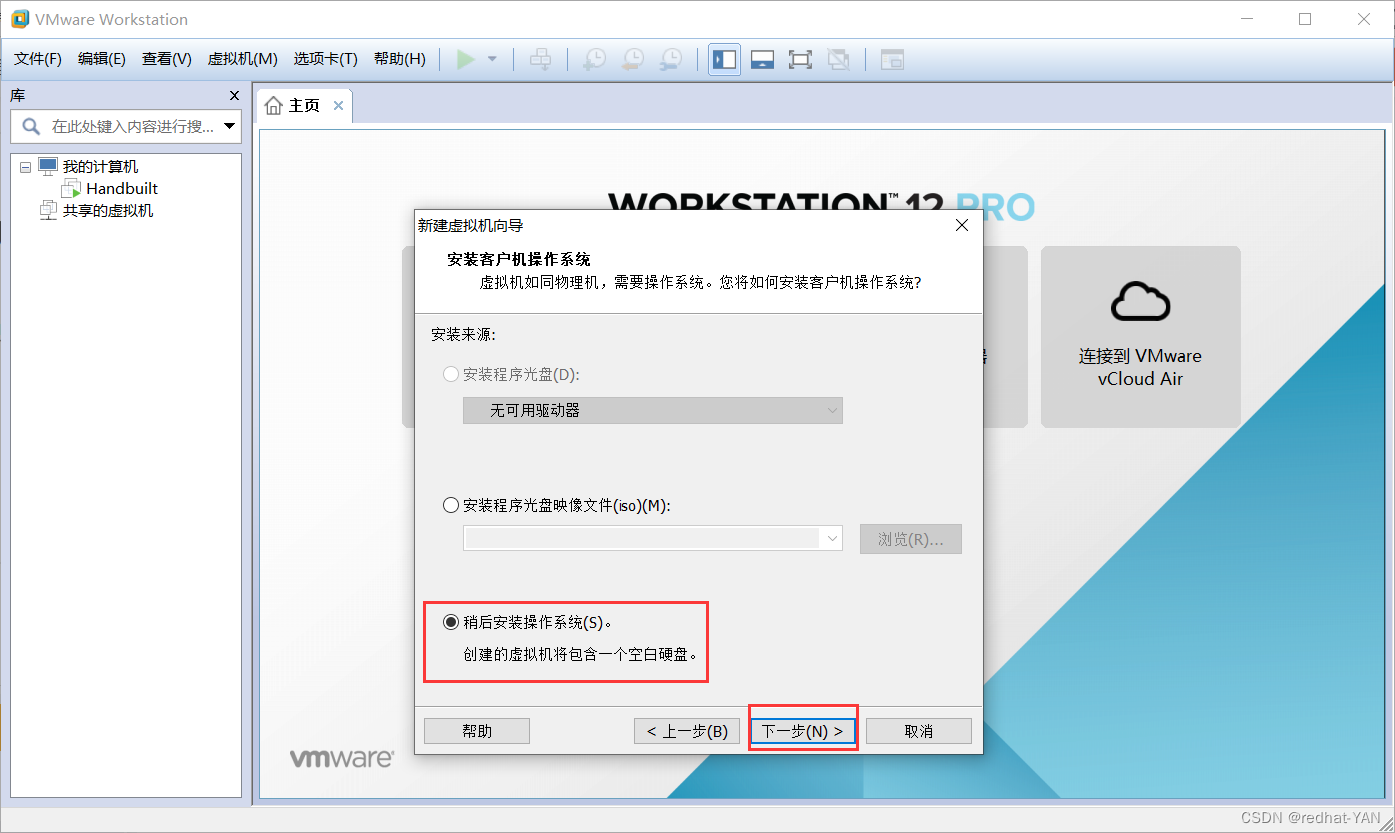
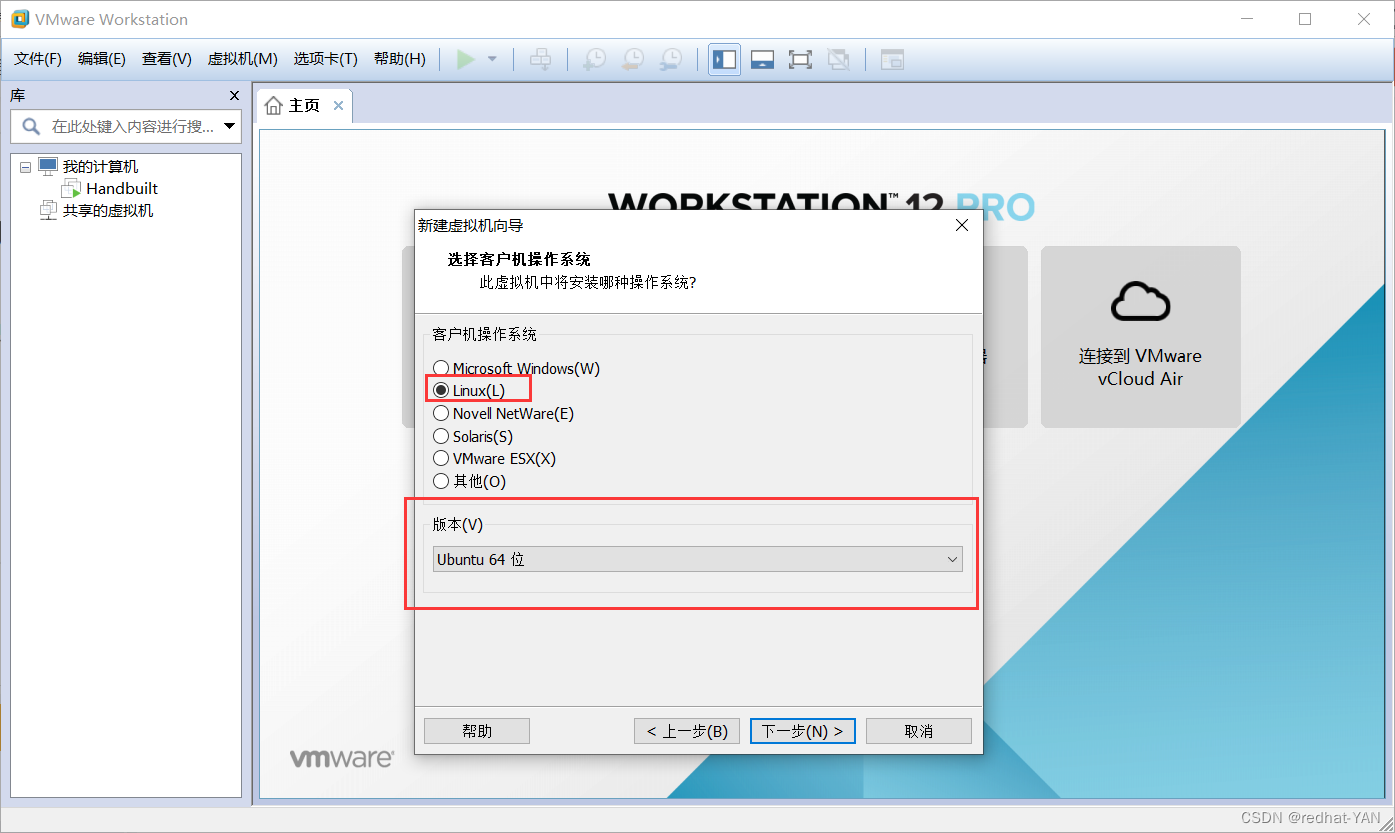
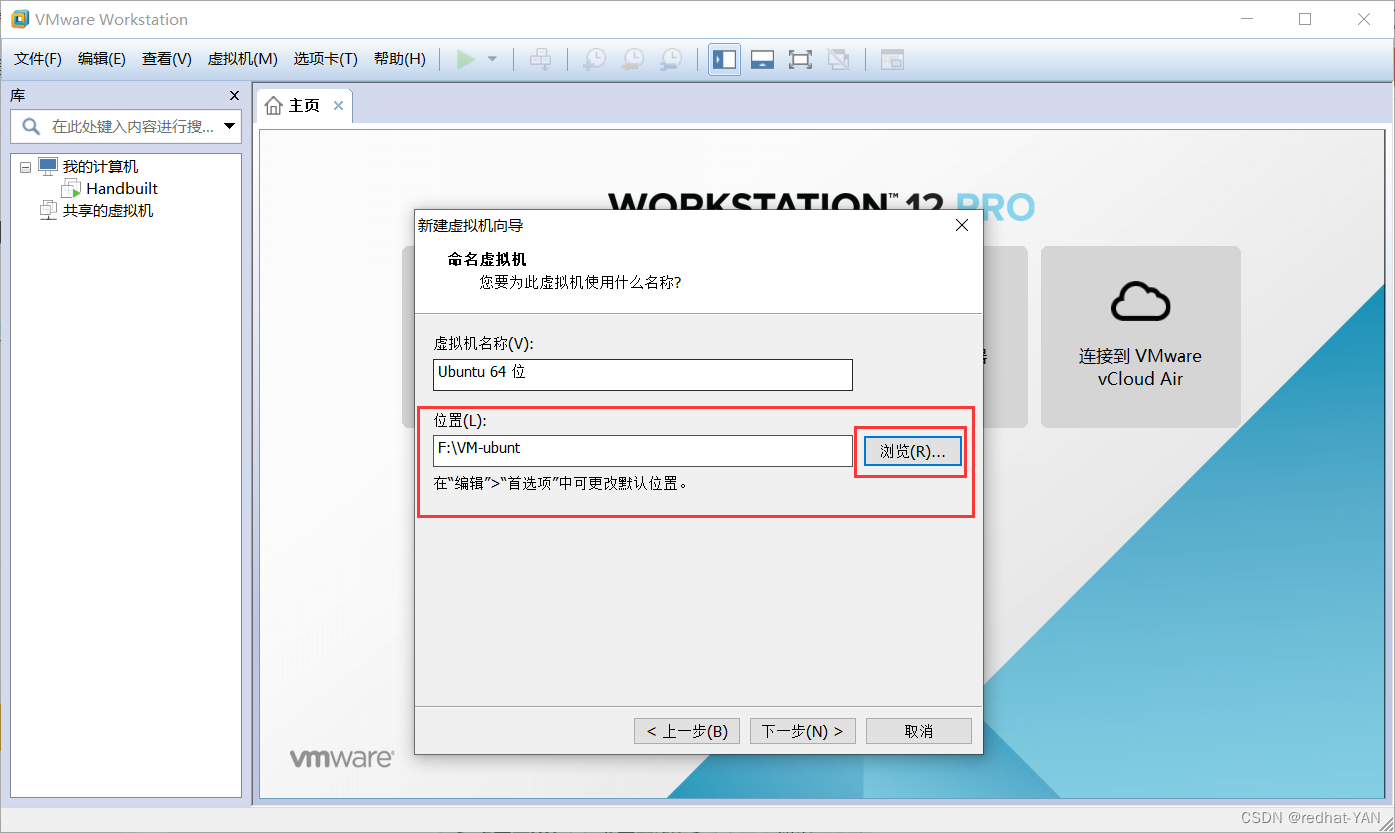
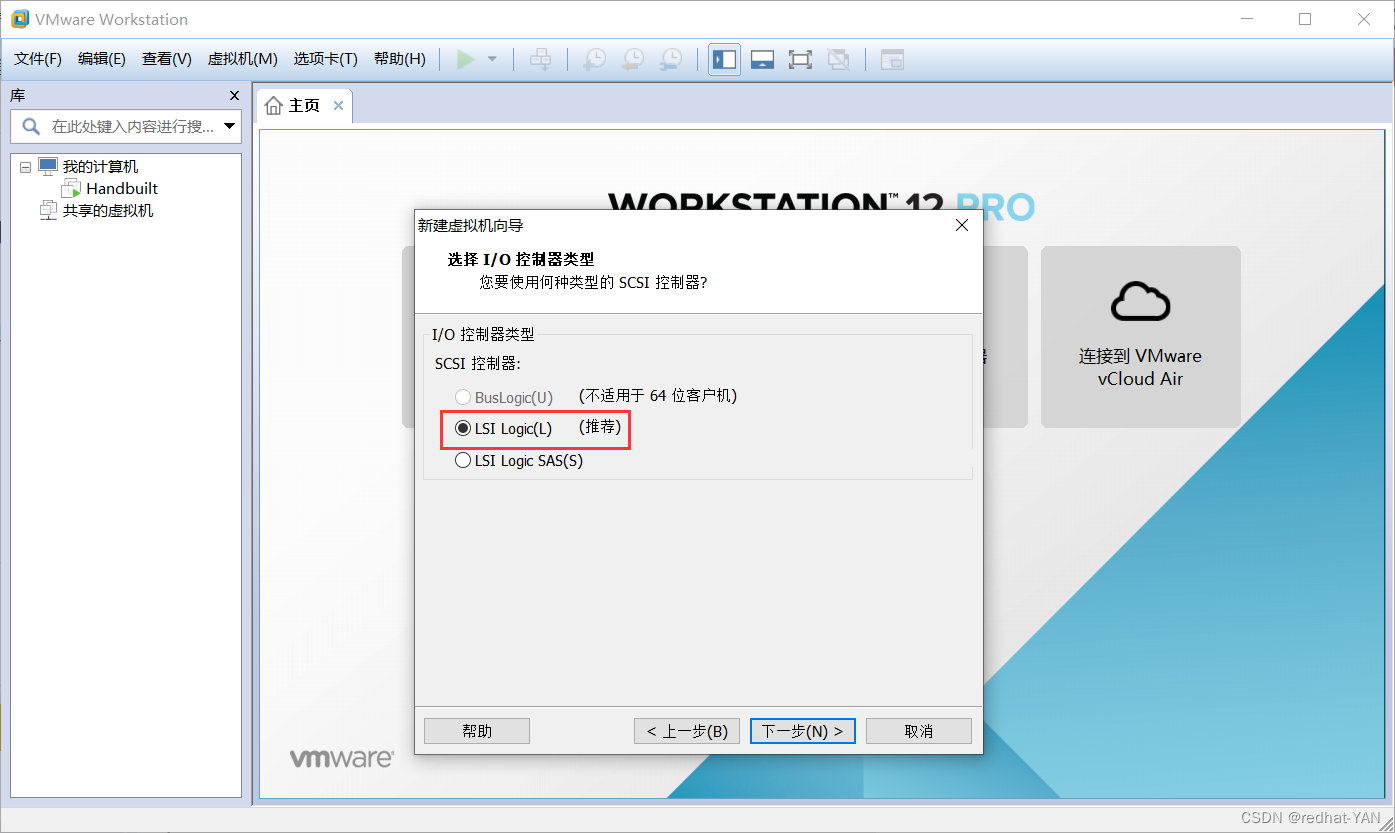
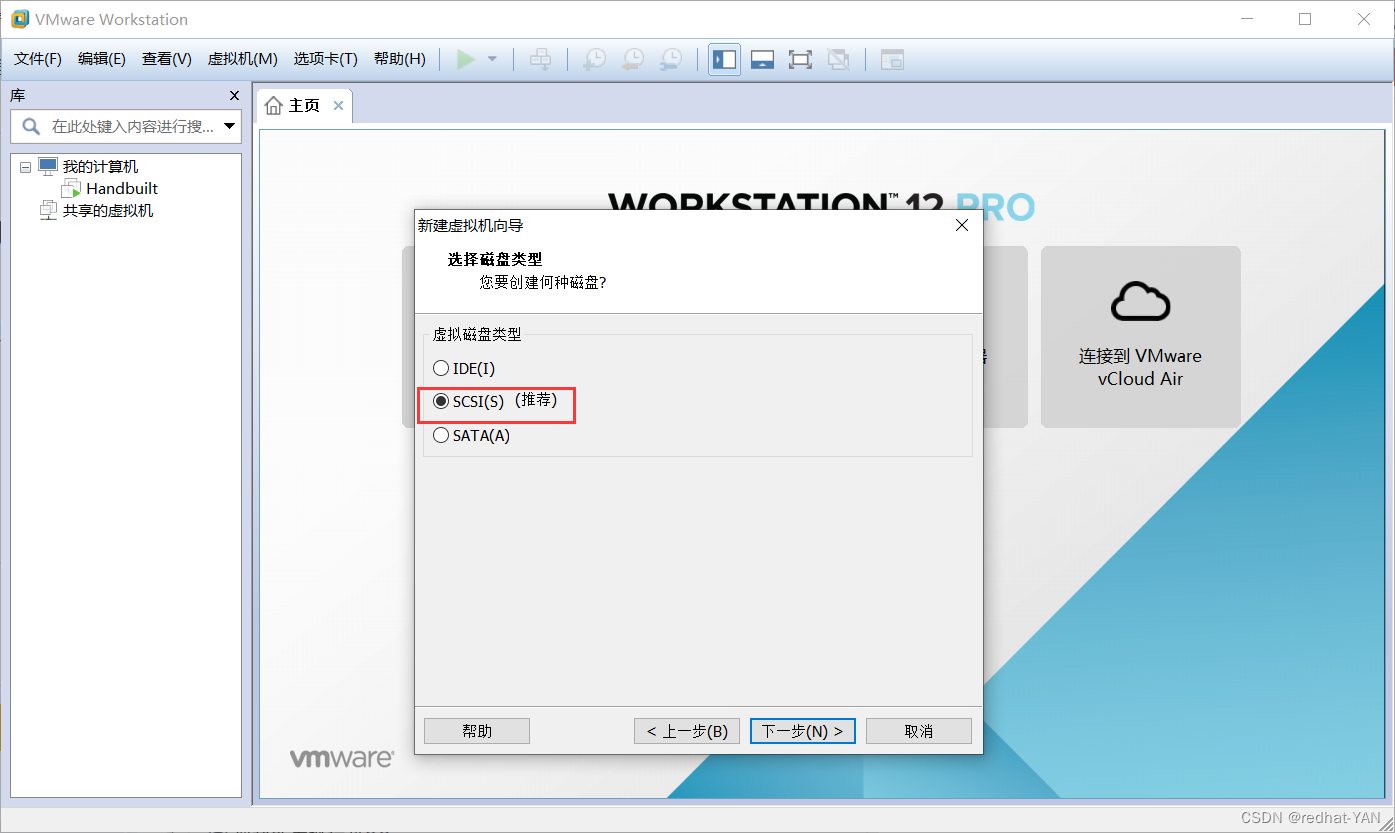
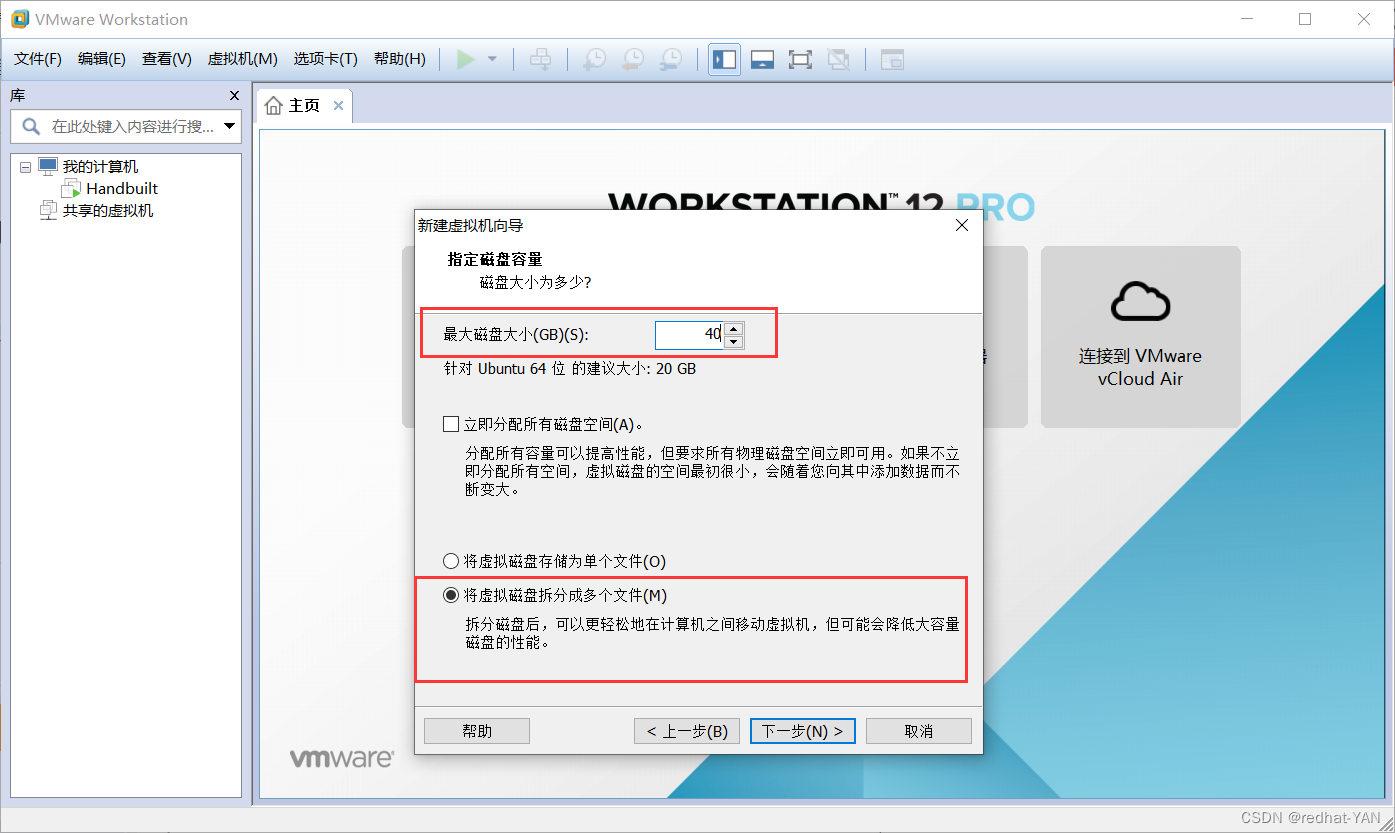
一、 VM安装ubuntu
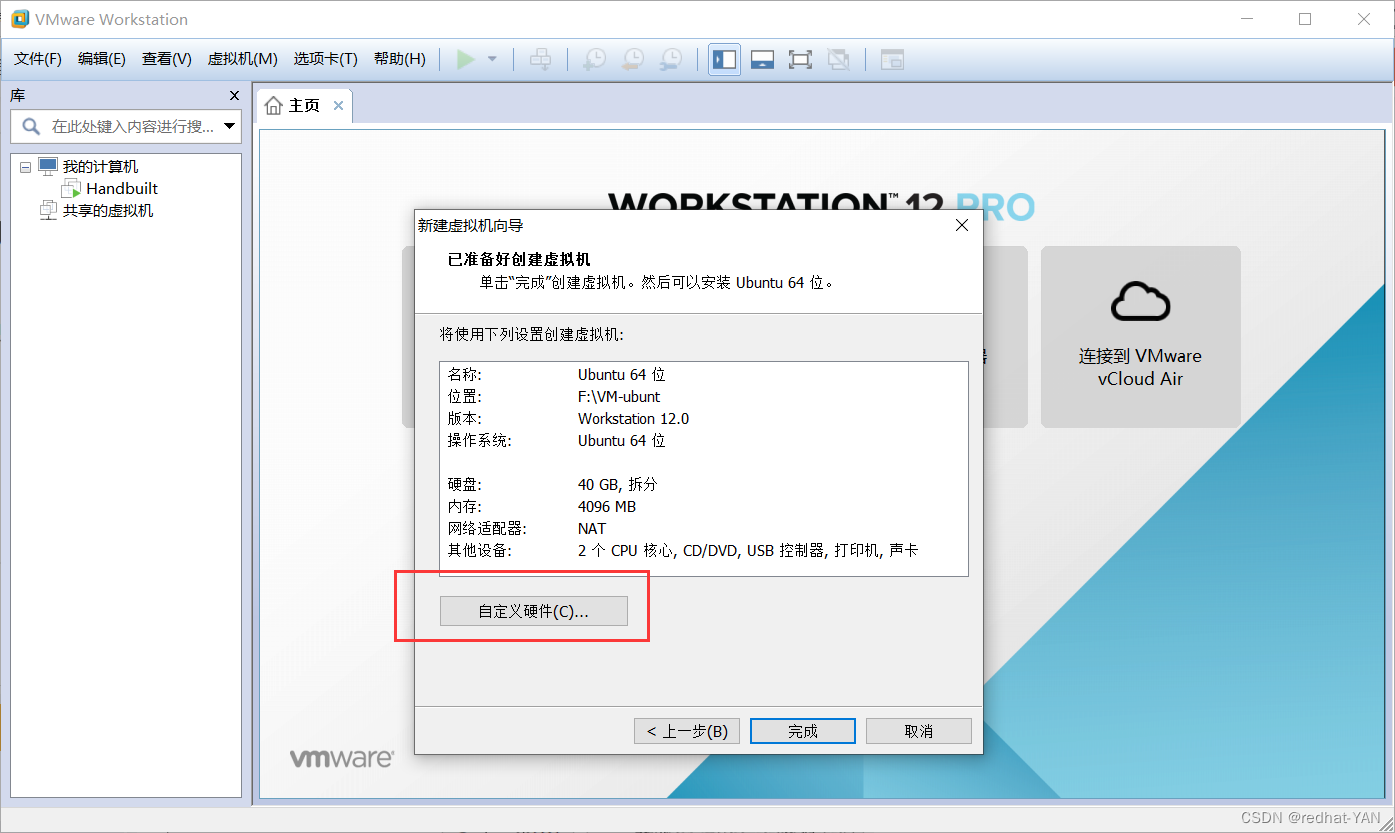
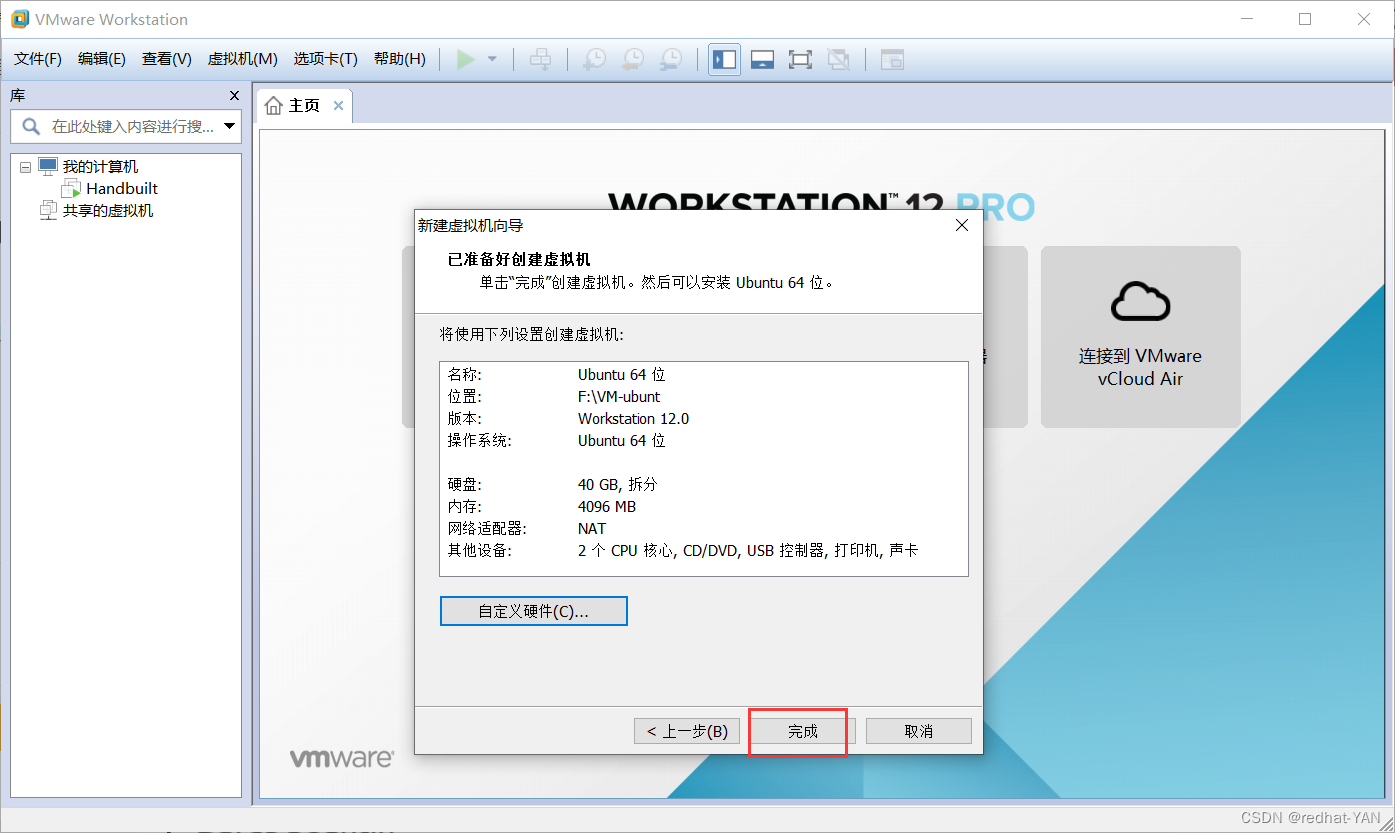
虚拟机名称可随意更改,位置:可随意设置。
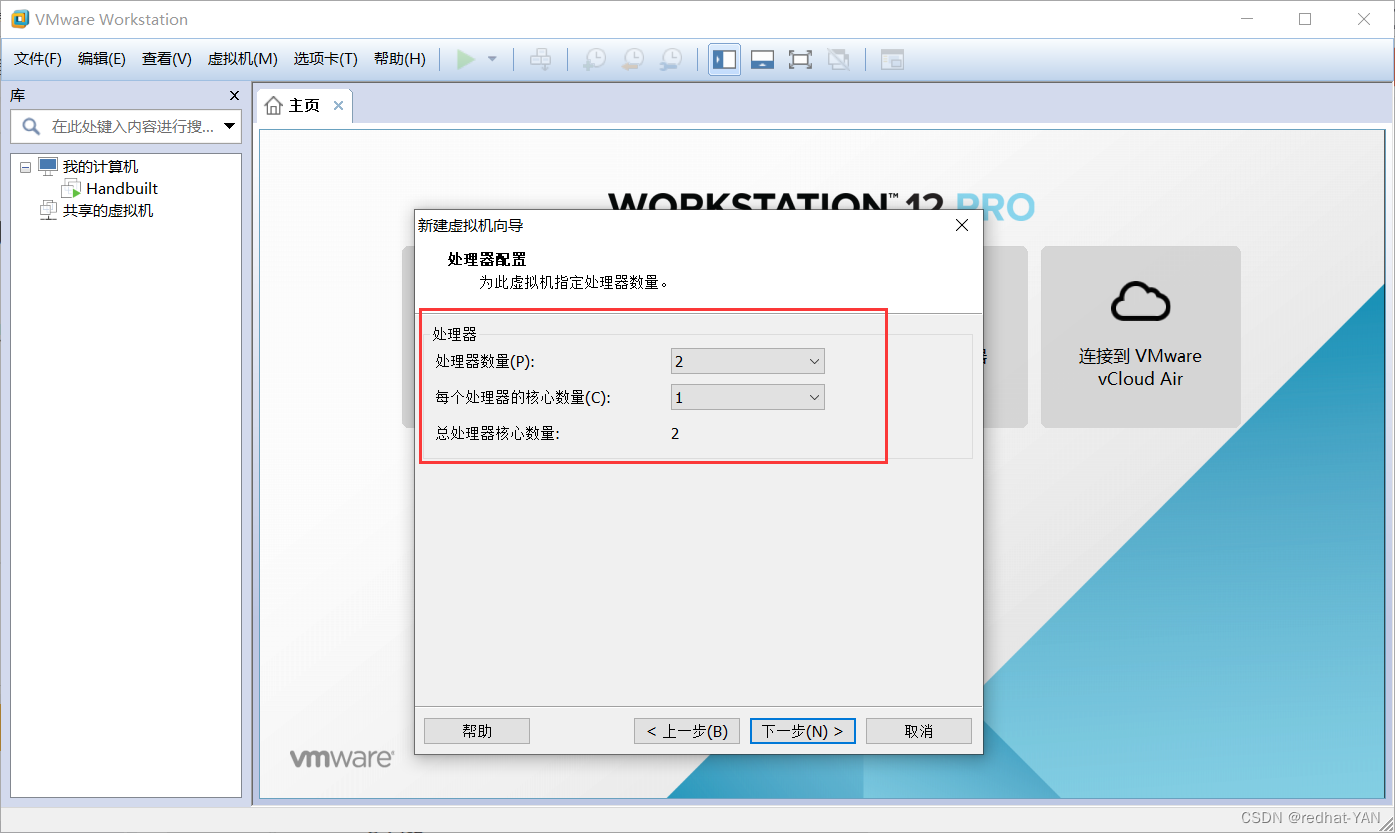
处理器数量至少选择1个, 我的选择为2个,根据自己电脑选择
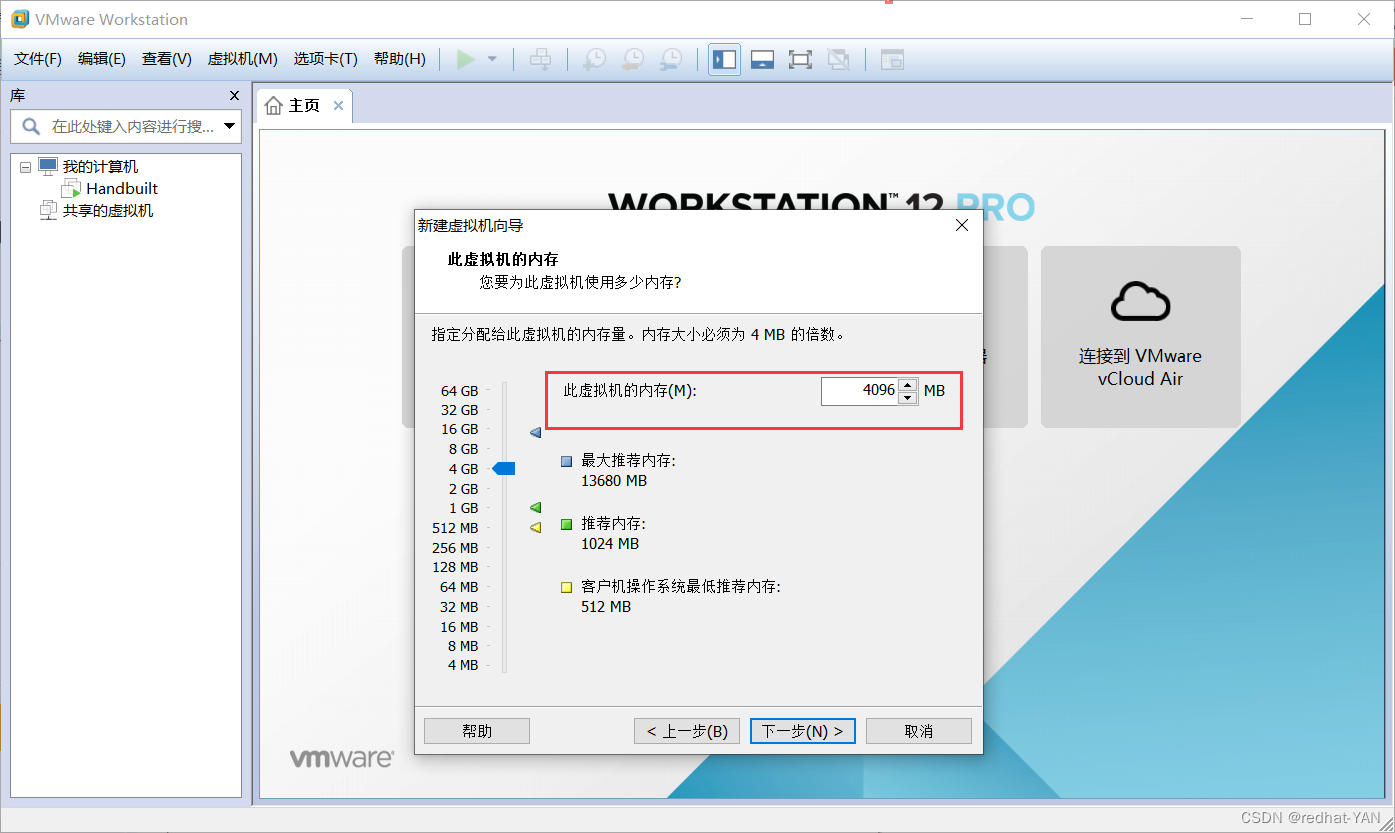
内存分配4G,根据自己物理机分配内存,最多不能大于物理机内存。
我的内存是16G,分配4G能运行ubunt快点(包括安装)
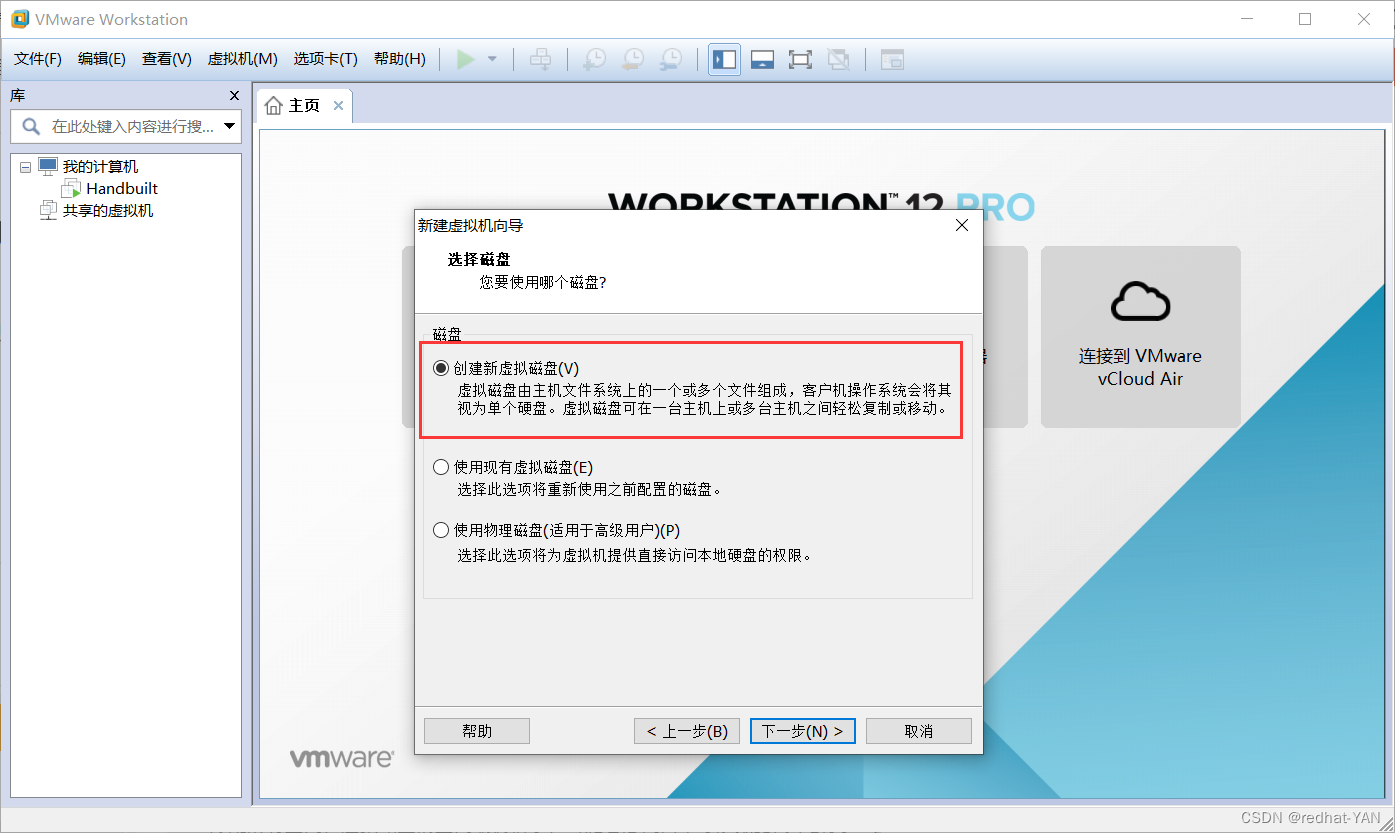
我将其放置在预先创建的文件夹下,可随意更改,这个是你的母盘,到时候可以把母盘迁移给别人
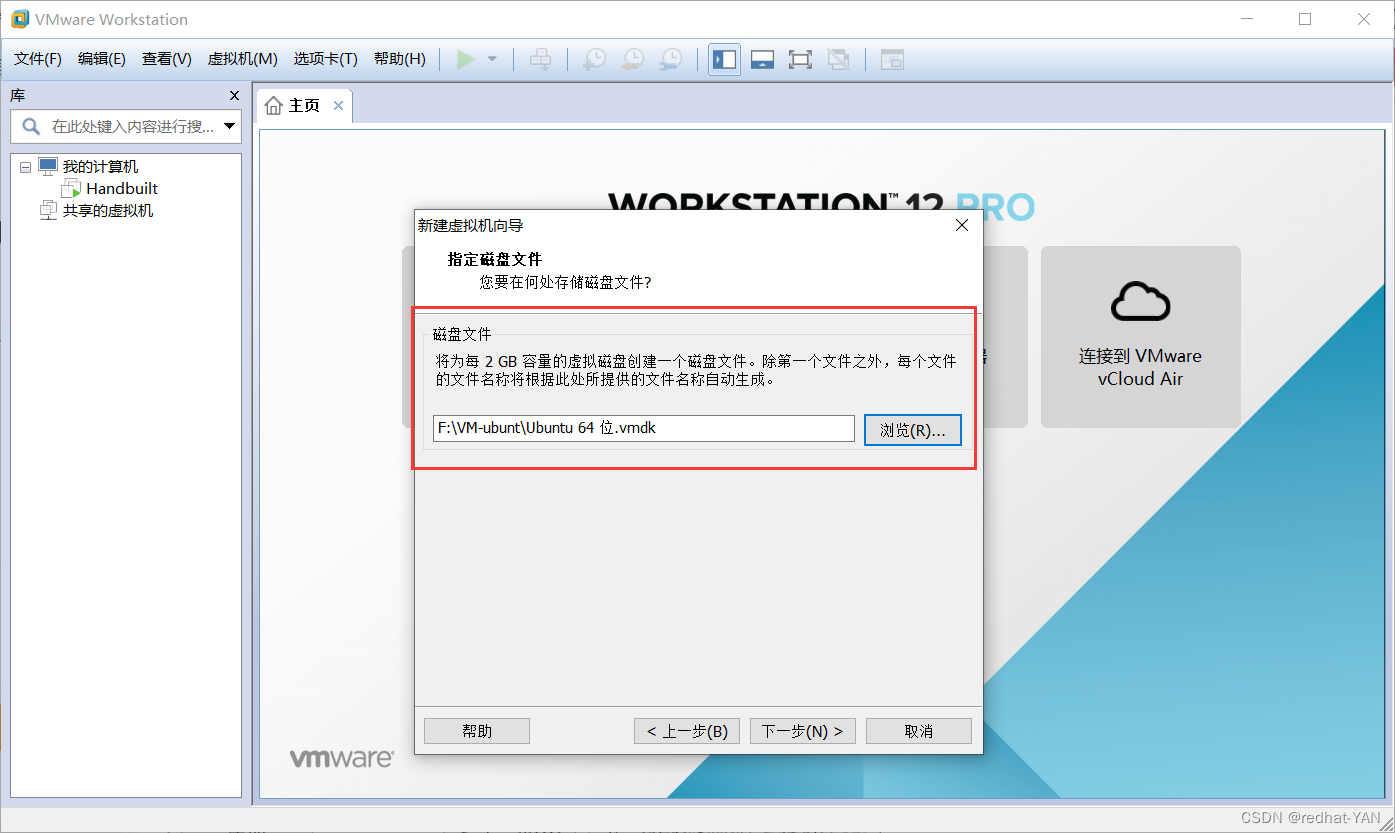
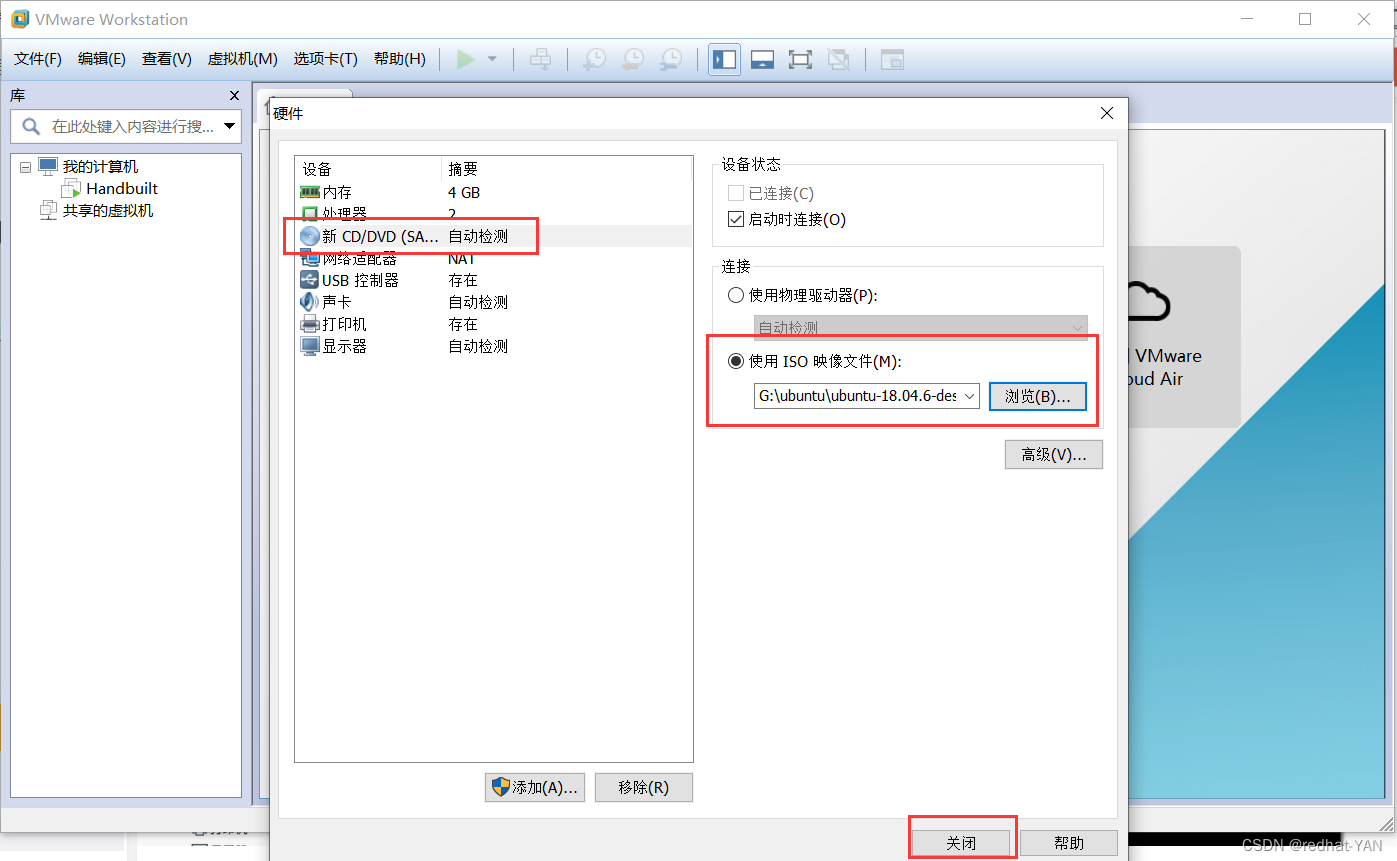
这块填写你的镜像文件(我发的压缩包解压后的文件地址)
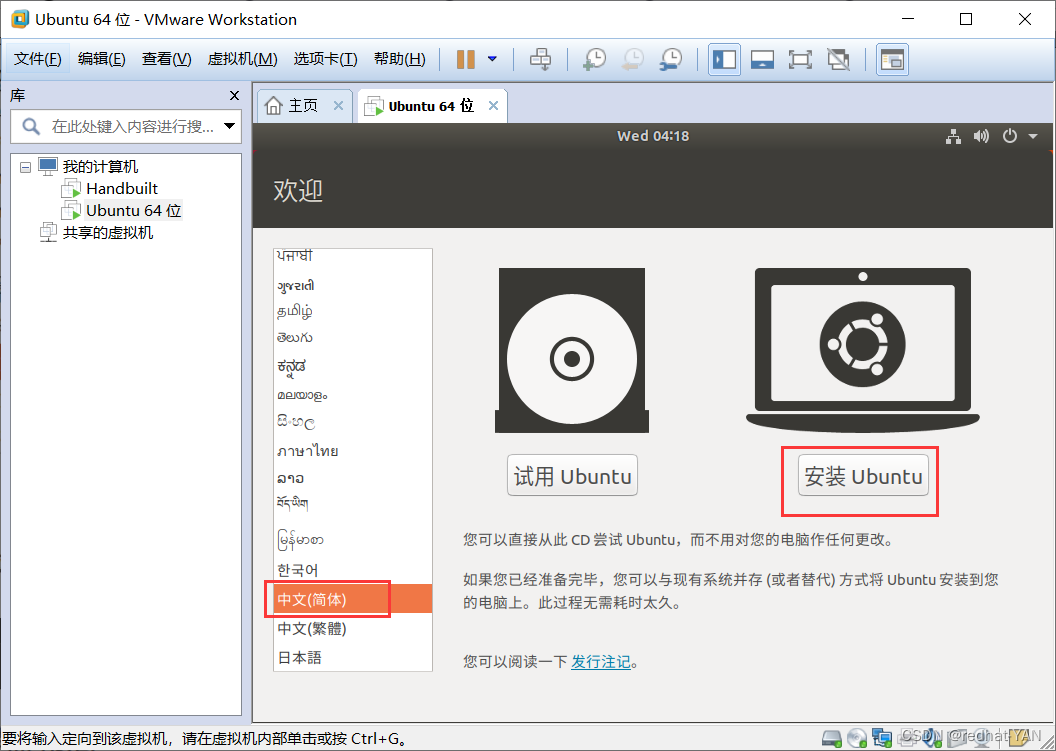
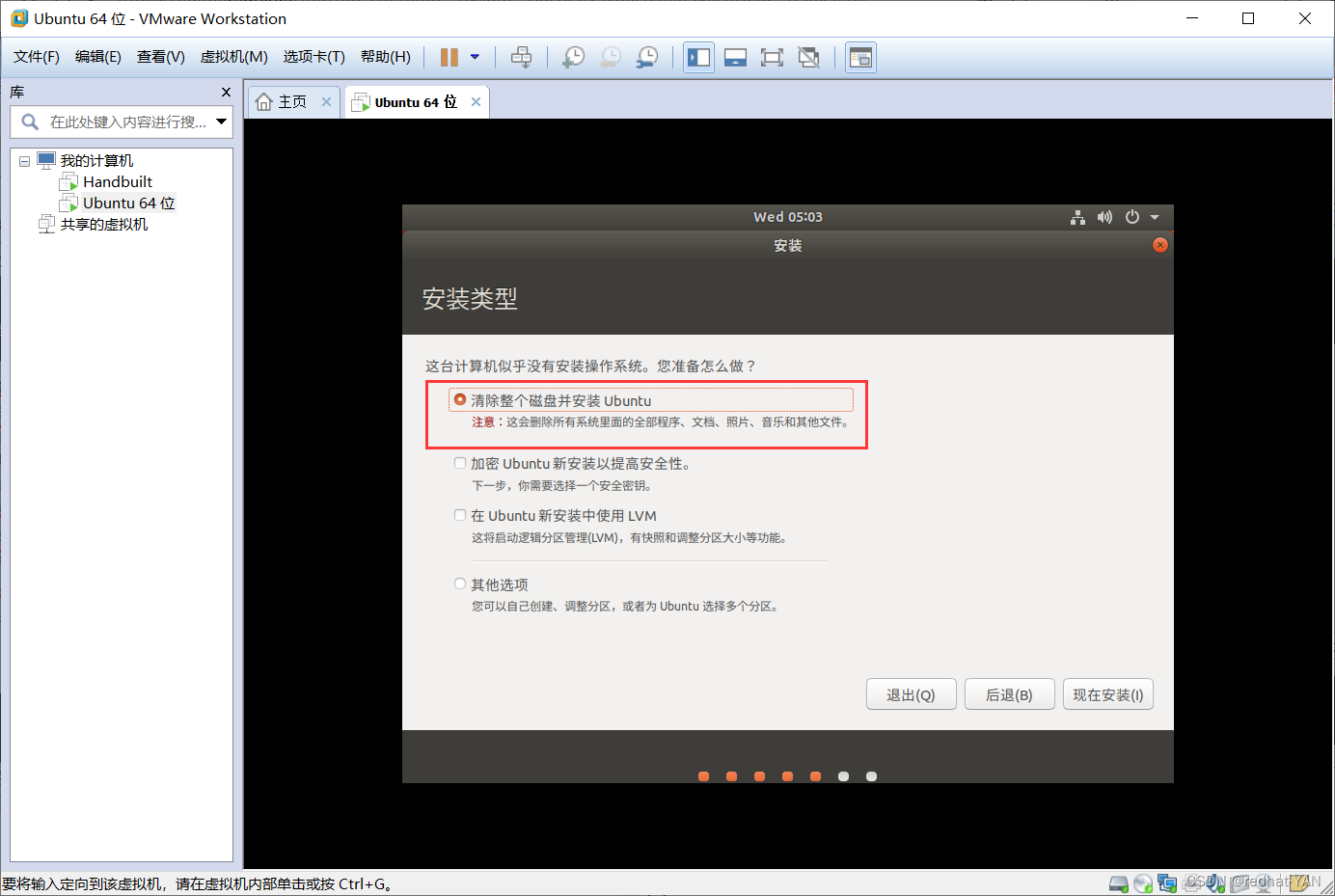
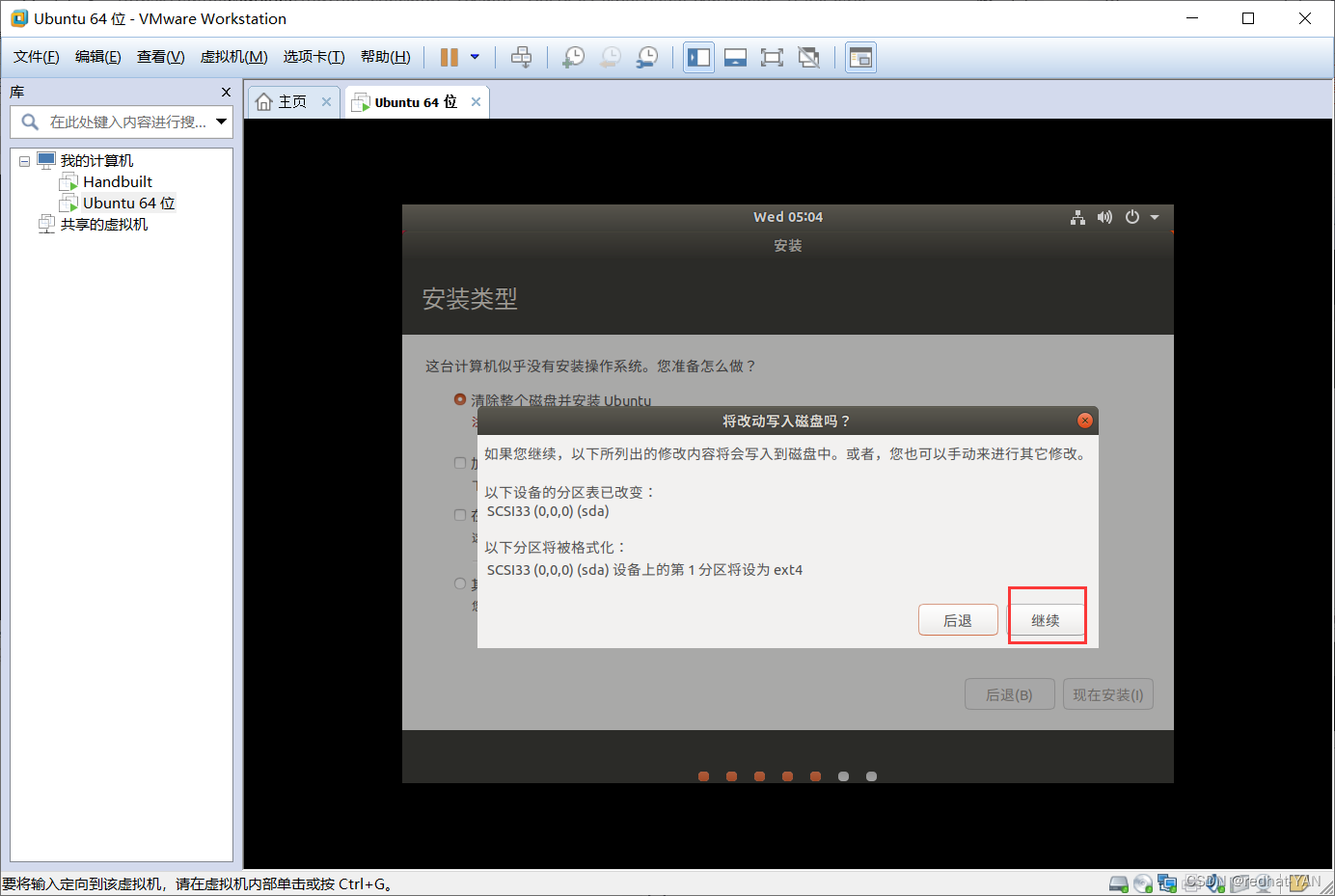
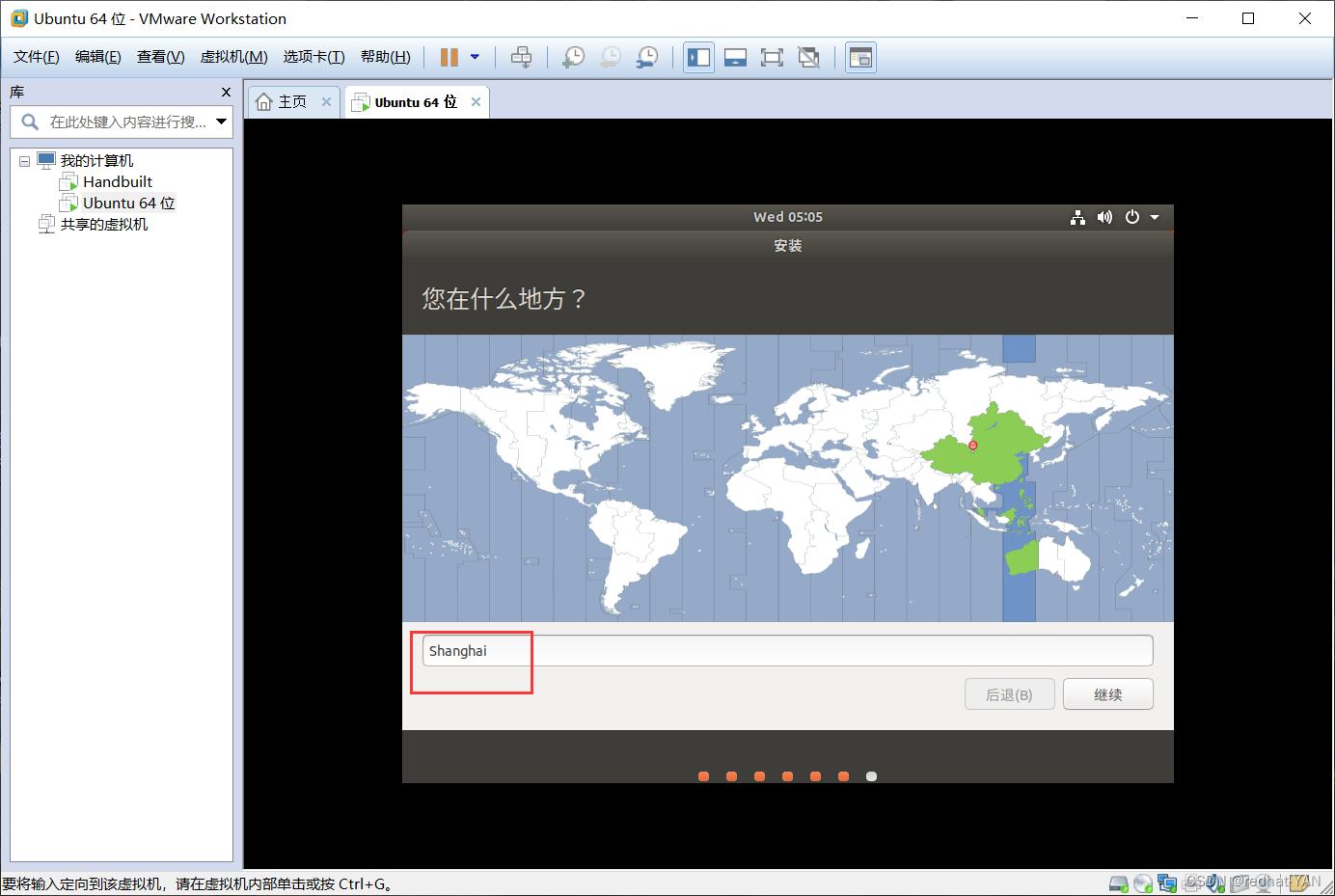
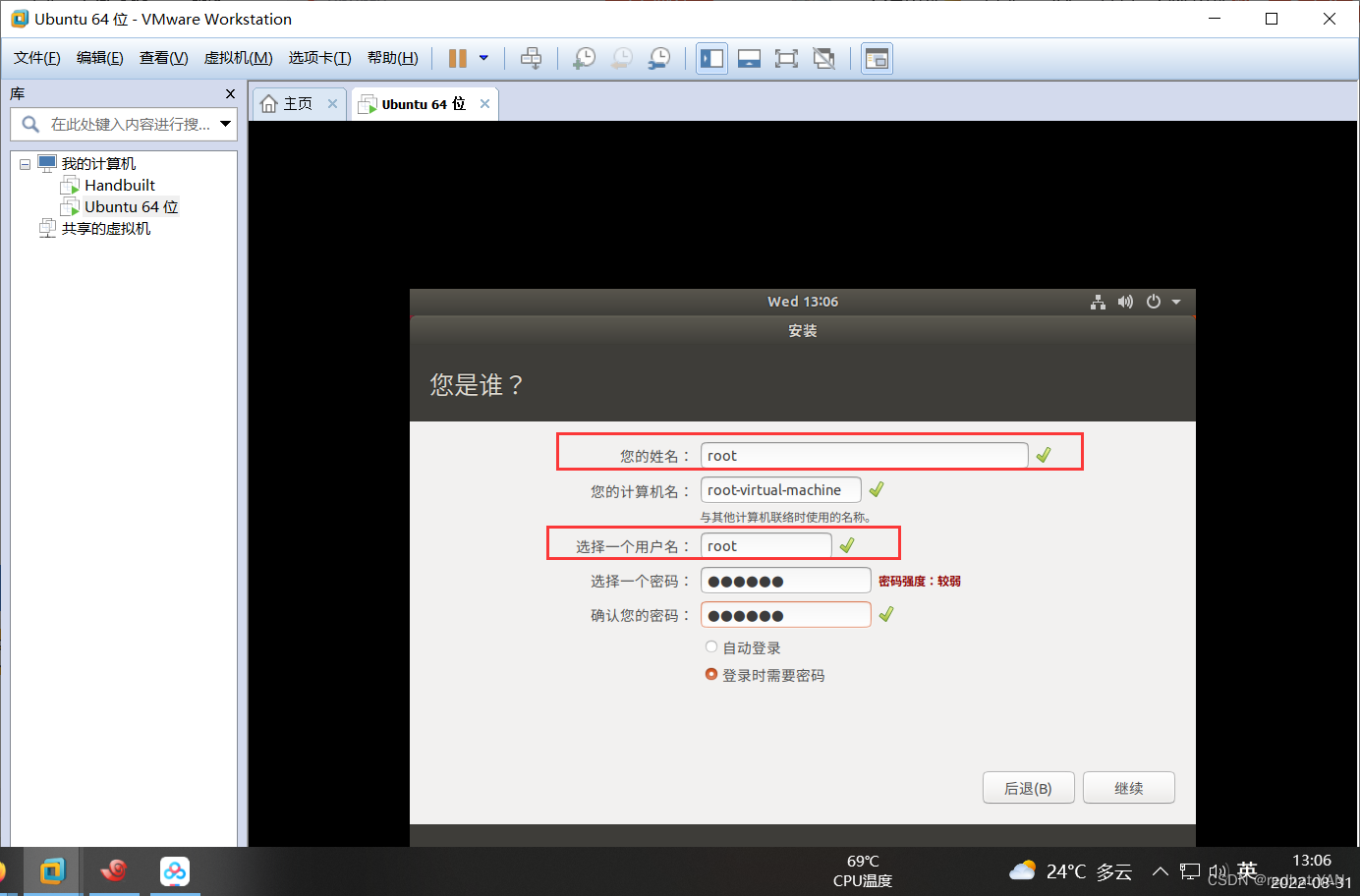
二、unbunt系统的安装
写成root第二个红框我写的yan
三、ros的部署
打开终端ctrl+shift+t
3.1软件仓库的导入
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 40976EAF437D05B5
装上自己喜欢的工具,通过openssh可以xshell连接,net-tools可以查看ubunt的Ip (建议安装)
后续需要vim去修改文件
sudo apt-get install openssh-server
sudo apt-get install net-tools
sudo apt-get install vim
更新源(软件仓库)
sudo apt update
如果有解析错误:
DNS没有配置
修改DNS的配置文件
sudo vim /etc/resolv.conf
添加下面三行
nameserver 8.8.8.8
nameserver 8.8.4.4
nameserver 127.0.0.1
sudo service network-manager restart
再次更新源
sudo apt update
3.2安装ros
安装ros完全版
sudo apt install ros-melodic-desktop-full
3.3环境变量的设置以及依赖性问题(初始化前的准备)的处理
设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
初始化前需要安装python依赖包
但是安装python依赖包的时候,python依赖包也缺少依赖包
方法:
多加几个源sudo vim /etc/apt/sources.list.d
加上这些源

sudo apt install python3-catkin-pkg-modules 安装依赖包提醒缺少的包
sudo apt install python3-catkin-pkg 安装依赖包提醒缺少的包
sudo apt install python3-rospkg 安装依赖包提醒缺少的包
再安装需要的python依赖包

3.4初始化
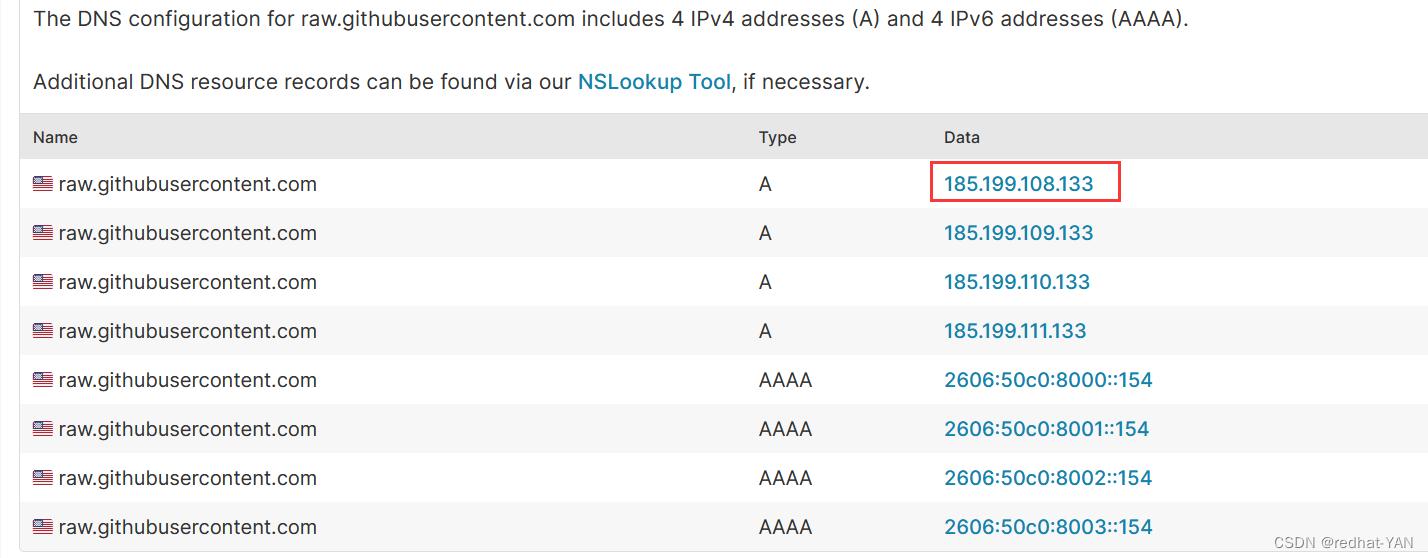
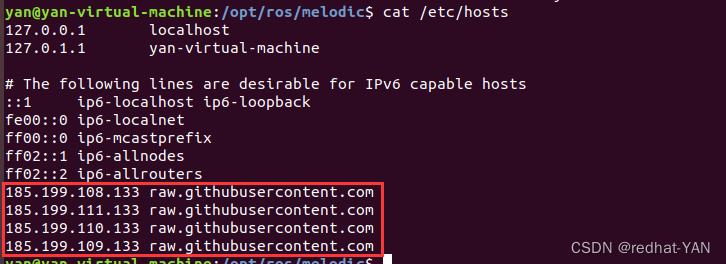
报错信息知道是解析不到,所以你需要到下面的地址搜索他的服务器Ip加到解析文件下/etc/hosts
服务器地址

这个就是他的DNS服务器,把ip和对应的域名加入你的解析中
多写点解析进去,这样后续就算其中某个域名服务器(raw.githubusercontent.com)挂掉也不需配置该解析了
再次运行初始化(前面报错了)
rosdep是一个用于安装系统依赖项的命令行工具
sudo rosdep init
初始化后发现需要更新这个工具

更新该工具
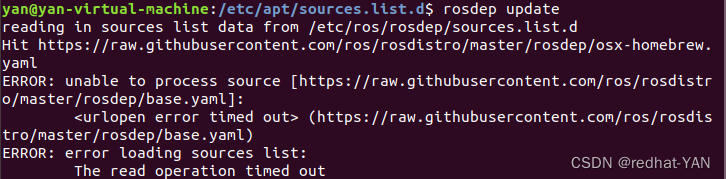
sudo rosdep update
超时是因为连接的外网,外网连接不稳定,多试几次就行了(重复执行该更新指令)sudo rosdep update
更新成功
初始化完成

3.5验证ros安装是否成功
验证ros安装是否成功
发现没有该指令

安装指令包rosbash(命令行工具)
和节点启动的脚本文件(可以一次性启动)
parameter全部写入一个*.launch文件,然后用roslaunch一次性的启动*.launch文件
sudo apt install rosbash
sudo apt install ros-melodic-roslaunc

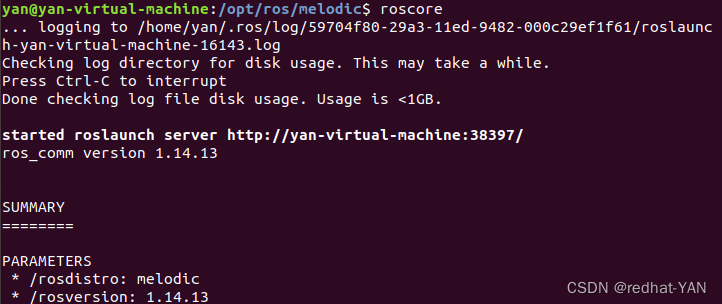
测试成功ros成功安装好了
四、运行小海龟
第一个终端运行roscore(终端打开快捷方式:ctrl+shift+t)
第二个终端运行rosrun turtlesim turtlesim_node
运行第二个终端发现该包没有

安装该包sudo apt-get install ros-$(rosversion -d)-turtlesim

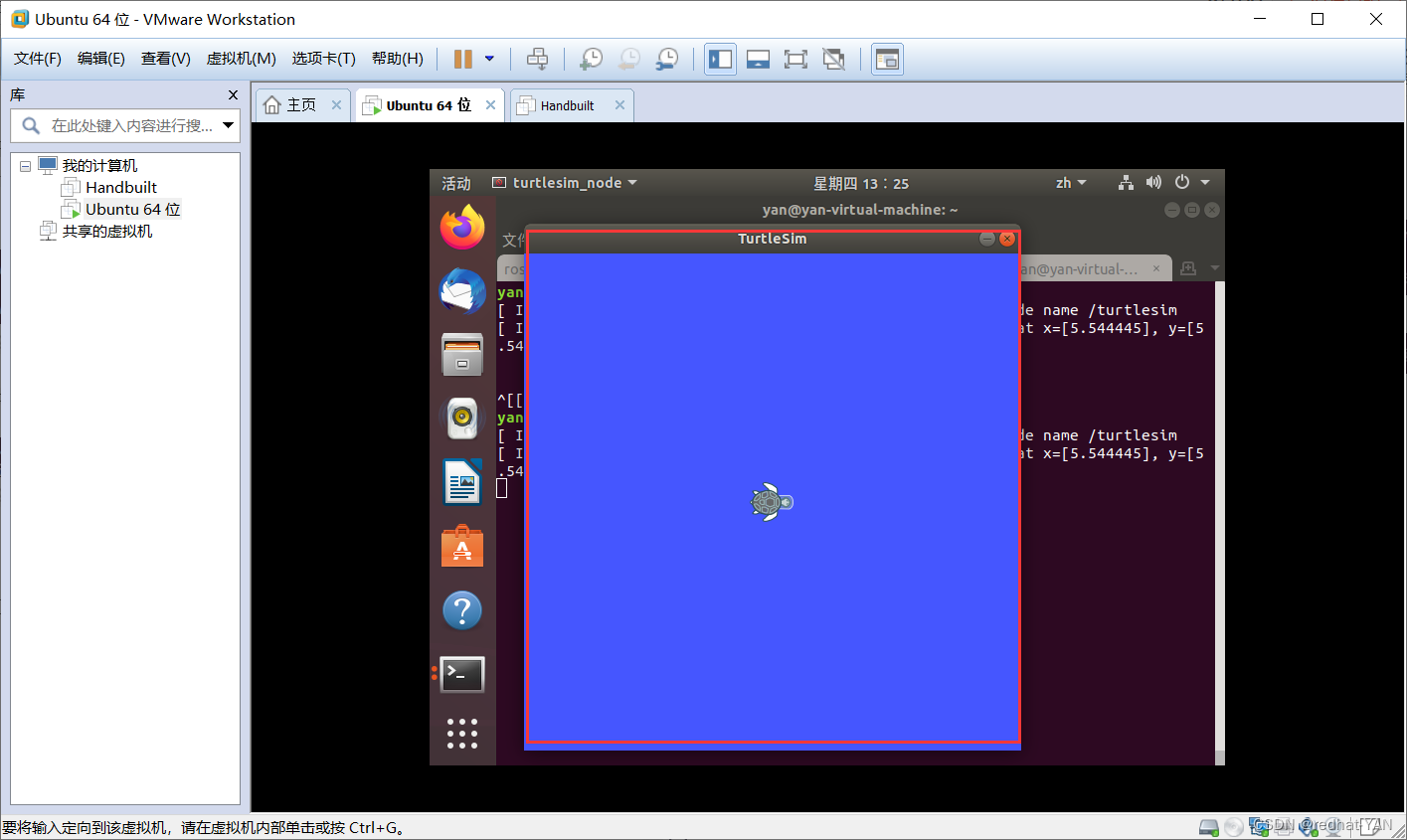
第二个终端运行该指令成功后,出现小海龟
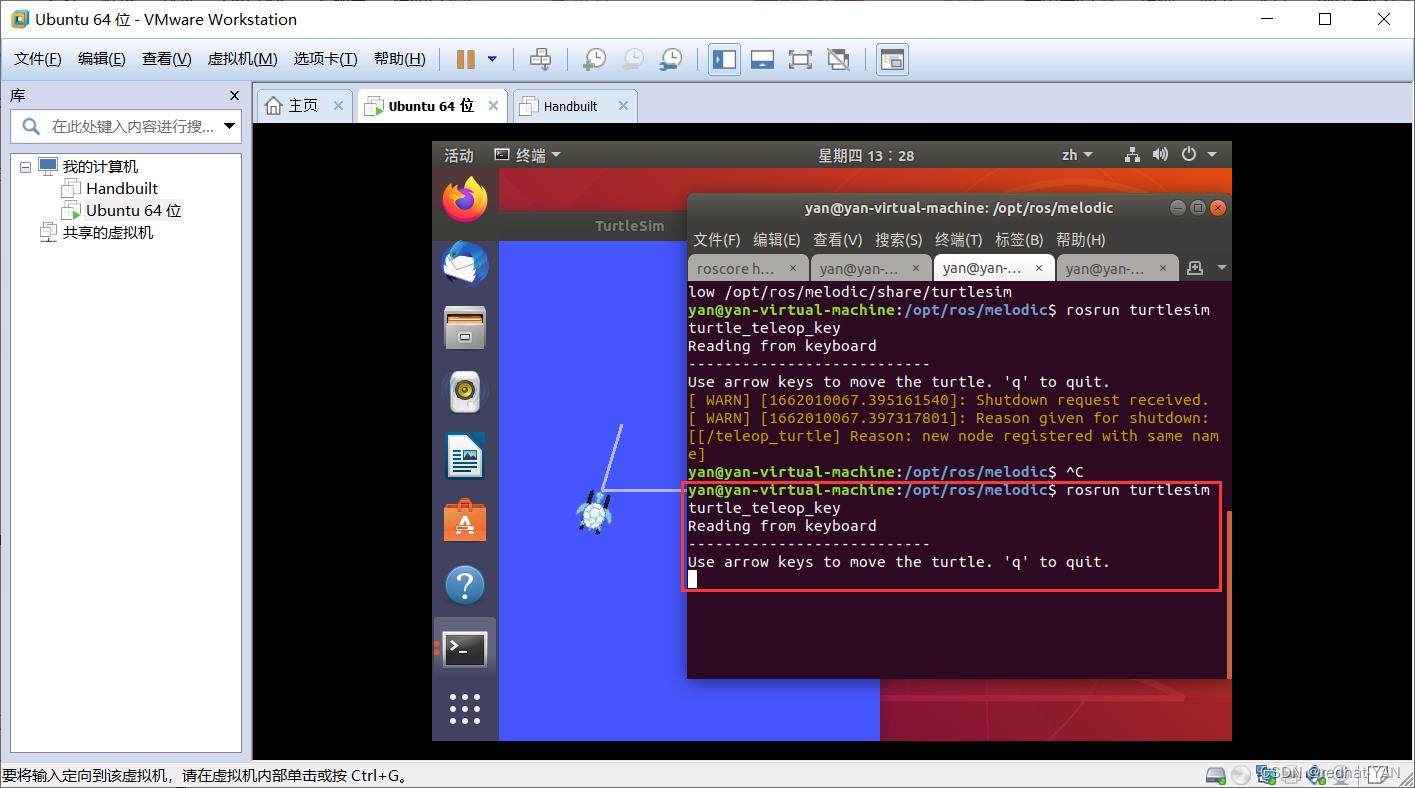
第三个终端运行rosrun turtlesim turtle_teleop_key
第三个终端可以控制小海龟运动了,在第三个终端上控制小海龟的运动(用键盘上下左右键控制)
END
祝同学们前程似锦!















 56
56











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









