







加减速算法是运动控制中的关键技术之一,也是实现高速、高效率的关键因素之一。在工业控制中,一方面要求加工的过程平滑、稳定,柔性冲击小;另一方面需要响应时间快,反应迅速。在保证控制精度的前提下来提高加工效率,实现机械运动平滑稳定,是目前工业加工中一直要解决的关键问题。当前运动控制系统中常用的加减速算法主要有:梯形曲线加减速、S形曲线加减速、指数曲线加减速、抛物线曲线加减速等。
1、“梯形”加减速
定义:指按直线方式(从启动速度到目标速度的加减速),以一定的比例进行加速/减速
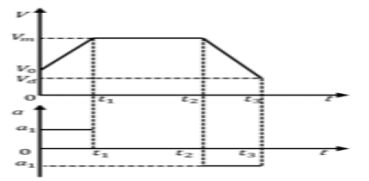
图1: “梯形”加减速速度及加速度曲线
计算公式:
![]()
优缺点: 梯形曲线其特点是算法简便,占用时少、响应快、效率高,实现方便。但匀加速和匀减速阶段不符合步进电机速度变化规律,在变速和匀速转折点不能平滑过渡。所以这种算法主要应用在对升降速过程要求不高的场合。
“指数形”加减速
定义:指按指数函数方式进行加减速。
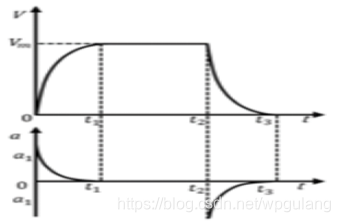
图2: “指数型”加减速速度及加速度曲线
计算公式:
 <
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









