









 该研究介绍了一个用于鸟类行为分析的多视角数据集,包含15只八哥的125个时刻的1000张照片,以及详细的标注。此外,作者构建了一个3D鸟类模板模型,并提出了一个从单视角图像进行3D重建的四步方法,包括多视角对齐、模型参数预测、语义特征预测和单视角优化。此工作为鸟类形态学研究和计算机视觉提供了新工具。
该研究介绍了一个用于鸟类行为分析的多视角数据集,包含15只八哥的125个时刻的1000张照片,以及详细的标注。此外,作者构建了一个3D鸟类模板模型,并提出了一个从单视角图像进行3D重建的四步方法,包括多视角对齐、模型参数预测、语义特征预测和单视角优化。此工作为鸟类形态学研究和计算机视觉提供了新工具。
标题:3D Bird Reconstruction: a Dataset, Model, and Shape Recovery from a Single View
链接:https://arxiv.org/pdf/2008.06133
本文首先是提供了一个可以用于分析鸟类行为学的数据集,然后为鸟类设计了一套精细的3D参数化模型,最后提出了一套算法来将3D模型拟合到单视角鸟类图像。
数据集
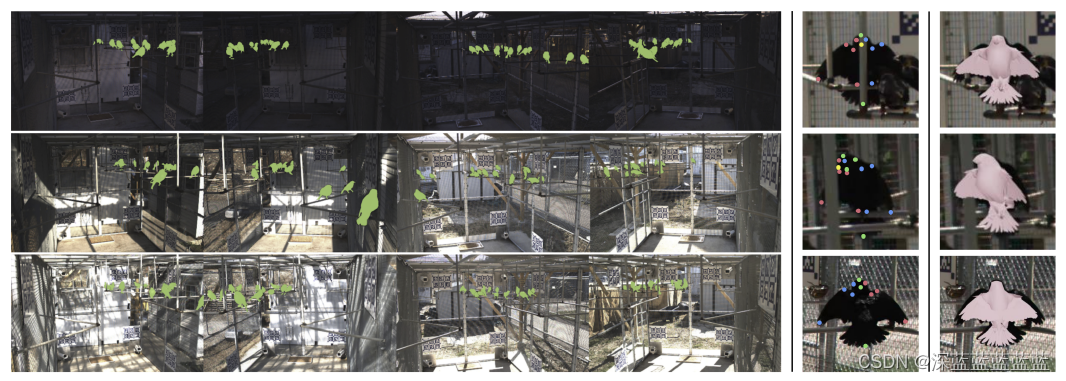
这个数据集是由8个在同一鸟笼中的相机捕获的,所有的鸟都是八哥(共15只)。 一共有125个时刻,1000张照片。所有照片中的个体都有对应的mask和bbox标注(6355个)。其中18个时刻中的1031个mask还标注了keypoints(12个语义点:嘴尖,左右眼,脖子,后颈,左右翅根,左右翼尖,左右爪,尾尖)。其余信息参见原文。
3D模板
作者首先从CGTrader Marketplace website上下载了一个可动的3D鸟模型。原模型包含了18k个顶点,13k个面。作者在此基础上移除了如羽毛,眼镜等描述细节的顶点,最后将模板删减为3932个顶点,5684个面和25个关节点(其中有一个根节点用于表示相机角度)。关节点对应的蒙皮权重用的是原模型的(即人工设定的)。除此以外,作者还提取了16个基于网格的3D关键点,对应的位置由选定的四个网格顶点位置的均值决定。
在此基础上,作者设定了几组参数用于描述这个模型:
alpha:骨骼长度,即子节点与父节点间的距离
theta:姿势参数
gamma:物体的全局位移
K,R,t:相机的内参(焦距等),旋转和位移
由于作者发现翅膀张开的情况使用LBS难以拟合,因此作者在实际操作中使用了两套模板,一个张开翅膀一个合起翅膀的。但是他们除了姿态以外别的参数全都一样。
3D重建
这里作者通过四个步骤构建出了可以对单视角图像进行重建的模型。主要包括: 多视角对齐,模型参数预测,语义特征预测,单视角优化。
多视角对齐
这里作者先使用多视角图像进行拟合,从而获得对应的相机和模型参数。在一开始,我们有的就是在基准状态下的模型及其对应的特征点,通过渲染器还可以得到模型的剪影。另外还有2D图像上手动标注的特征点和剪影,因此很直观的我们就可以构建关键点和剪影的约束。在此基础上作者又增加了三个先验保证了模型拟合的效果:
关键点约束:把标注的关键点和模型上的关键点投影做l2损失
剪影约束:把标注的剪影和渲染模型得到的剪影做l2损失
形变先验:使用l1约束对齐结果的姿势(theta)不要比原模型偏离太多
关节先验:约束关节的旋转角度不要超过设定的范围
骨骼先验:约束骨骼的长度不要超过设定的范围
模型参数预测
这一步主要是为了后续的单视角优化做准备。这里作者主要的目的是将上节中获得的结果作为ground truth,用来训练出一个端到端的网络来直接预测模型参数。
具体来说,作者先将获得的相机参数(姿势,视角,位移)拟合到一个高斯分布,然后从分布中对每个个体随机采样100套相机参数,将模型对应的关键点和剪影按照对应的相机参数投影,从而构建(模型参数:关键点&剪影)的训练样本对。
之后作者分别使用了独立的网络来预测姿势和形状。其中姿势预测网络的输入是关键点,输出就是关节旋转角度(25*6个旋转角度+3个位移参数)。形状预测网络的输入是剪影,输出是骨骼的长度(24个骨骼)。
语义特征预测
这一步也是为了后续的单视角优化做准备。这里作者的目的是训练一套检测网络来从输入的图像中检测到鸟的bbox和mask。主要分为了两步:1.使用R-CNN检测图像中每个鸟的位置,即bbox,2.根据bbox裁剪图片,再使用HRNet预测剪影和关键点。
单视角优化
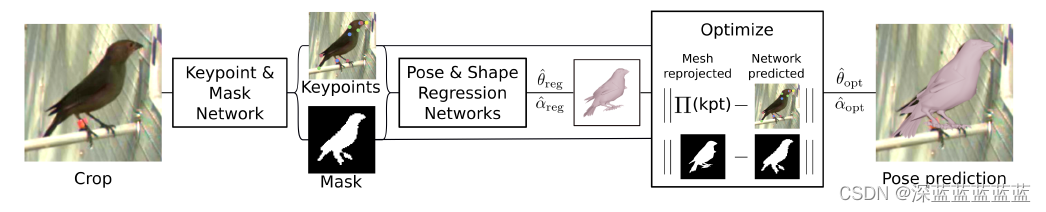
有了以上几步做基础,终于就可以进行单视角的3D重建了。流程如上图所示:
1.从图像中检测关键点和剪影(语义特征检测)
2.使用检测出的关键点和剪影预测模型参数(模型参数预测)
3.按照模型参数构建模型,并通过渲染得到模型剪影,然后按照3D模板那节中提到的方式找到模型上对应的关键点,并与检测出的关键点和剪影做损失,就和多视角对齐中的关键点约束和剪影约束一样。不过这里作者没有使用另外的三个先验,而是改成了对姿势和形状做了基于马氏距离的约束。

















 331
331

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









