






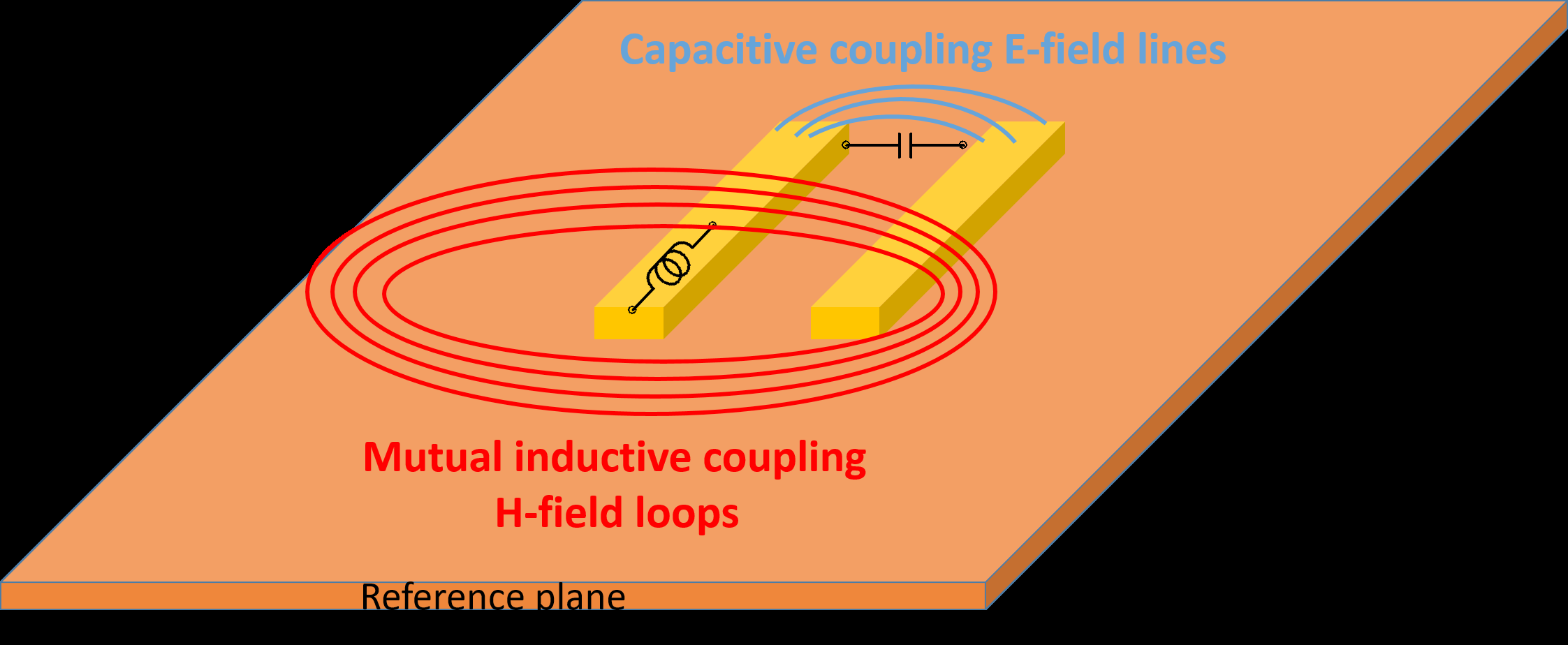
串扰是三个重要的噪声源之一,它会使接收信号失真并使电压噪声引起误码。多大算大显然取决于我们实际的应用。但是,如果只需要粗略估计的话,应该是多少呢?
在单端系统中,从所有源头设计的最大串扰量应小于信号摆幅的5%,在高速串行链路中,要设计的最大串扰的安全值应小于-50dB,即0.3%。
有两个普遍的问题会在接收器上引起误码:垂直方向的噪声(称为电压噪声)和水平方向的噪声(称为抖动)。
通常将引起噪声的原因分为损耗、反射噪声、串扰、电源噪声,在差分对的特殊情况下,模式转换也是如此。这些也会引起抖动,与随机抖动不同,我们将其归入确定性抖动的一般类别。
在损耗通常不重要的单端系统中,电压噪声的主要影响是波形垂直方向的影响。来自反射、串扰和电源噪声的电压噪声有多少?答案取决于噪声容限。
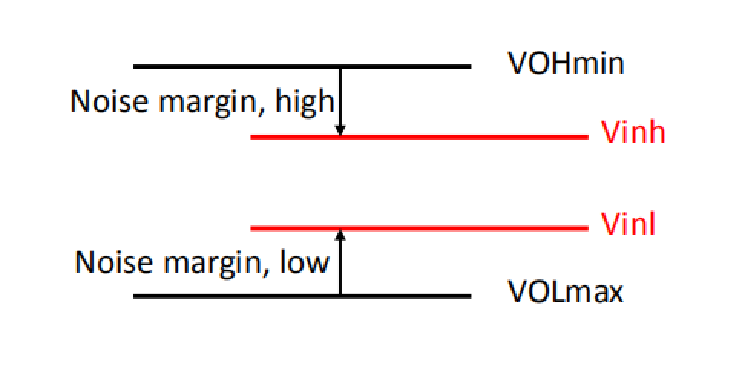
来自Tx的最差电压与Rx的最差电压之间的差是可用的“摆动”空间量。在Rx信号超出准确接收到的1或0的限制之前,可以容忍的噪声量。我们将此差异称为“噪声容限”。
它因技术而异。对于2.5V CMOS技术,它大约占信号摆幅的15%。对于1.8V CMOS,约为18%。
当然,该可接受的电压电平也必须存在于实际或恢复的时钟沿附近,在沿之前的建立时间内以及沿之后的保持时间内。这些边界定义了可接受的眼图。
为了稳定运行,上述所有噪声源中Rx处的所有噪声之和必须小于噪声余量。每个源的噪声幅度分配就是噪声预算。
如果总体噪声预算是信号摆幅的15%,并且设计团队中的每个人都是很好的谈判者,否则没有令人信服的理由,分配噪声预算的一种方法是将其平均分配在反射噪声、串扰和电源噪声。
这是经验法则的起点,该经验法则作为一个粗略的起点,将所有来源的串扰保持在信号摆幅的5%以下。
在高速串行链路中,如果存在很多损耗,则奈奎斯特频率处的Rx信号幅度可能低至-25dB,并且仍然可以打开均衡。某些规格(例如10Gbase-KR)建议在奈奎斯特(Nyquist)的信噪比(SNR)优于23dB。如果信号可能低至-25dB,则意味着总噪声应低于-25dB。这大约是0.3%。
在交错架构的最坏情况配置中,应将近端串扰保持在信号的约-50dB以下,以保持可接受的SNR。当然,如果Rx处的信号大于-25dB,则最大允许串扰可能会更大。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









