







捷联惯导误差方程的推导前提是:
- 惯性传感器误差模型
前提是:IMU设备经过出厂标定之后,对所谓IMU传感器存在的“残差”的考虑;主要是:失准角、非正交角、零偏、刻度系数、二次项误差等;
- 姿态误差方程
假定载体坐标系是重合的, 理想导航坐标系和计算导航坐标系之间存在失准角;基于失准角旋转矢量,对姿态微分方程进行推导,得到姿态误差方程;
- 速度误差方程
描述和姿态误差方程推导一致;
- 位置误差方程
描述和姿态误差方程推导一致;
通过以上可以看出,IMU由于自身存在缺陷(各种误差源),导致输出的角速率、加速度的数据内含误差;又因为捷联惯导的姿态、速度、位置方程是相互耦合的,即”我中有你,你中有我“,因此,在积分推算的过程中,误差会逐渐增大;从其本质上看,误差的缠身就是IMU自身的缺陷、以及数字计算机计算精度和捷联惯导算法精度等所导致。
一、SINS线性误差模型精度验证
需要指出的是:在误差模型中,只考虑了误差量的一阶小量,忽略误差量的二阶小量;忽略了重力异常、重力偏差;忽略其他参数(根据载体机动情况而定)
详细误差方程见:捷联惯导基础知识解析之二(捷联惯导更新算法和误差方程)
1、psinstypedef(346) 即状态为34,量测为6
采用双子样解算、设置IMU误差源、设置初始姿态、速度、位置误差;
% initial settings
psinstypedef(346);
[nn, ts, nts] = nnts(2, trj.ts); %双子样
imuerr = imuerrset(0.01, 100, 0, 0, 0,0,0,0, 10, 10); %初始零偏和比例因子误差(ppm)
imu = imuadderr(trj.imu, imuerr);
davp0 = avpseterr([10;-10;30], 0.1, [10;10;30]);
ins = insinit(avpadderr(trj.avp0,davp0), ts);(1)纯惯导解算:
k1 = k+nn-1;
wvm = imu(k:k1,1:6); t = imu(k1,end);
ins = insupdate(ins, wvm); ins = inslever(ins);(2)采用346方式的线性误差传递方程:
首先将误差状态(34个)赋初值:其中初值就是添加的误差项
xk = [davp0; imuerr.eb; imuerr.db; zeros(4,1); imuerr.dKga]; % init state error 34个状态 3+3+3+3+3+4+15=34
然后利用kalman滤波的状态预测方程和量测预测方程,对姿态、速度、位置误差进行预测:
最优一步估计:

量测一步预测:

代码如下:
Fk = kffk(ins); Hk = kfhk(ins); Hk(1:3,1:3) = -askew(ins.vn); % ??
xk = Fk*xk; zk = Hk*xk;
avp(ki,:) = [ins.avp', t]; %纯惯导更新
xkk(ki,:) = [xk(1:9)', t]; %kalman预测方程,预测更新
zkk(ki,:) = [zk', t]; ki = ki+1; %kalman量测预测方程(3)画图、误差传递方程精度验证
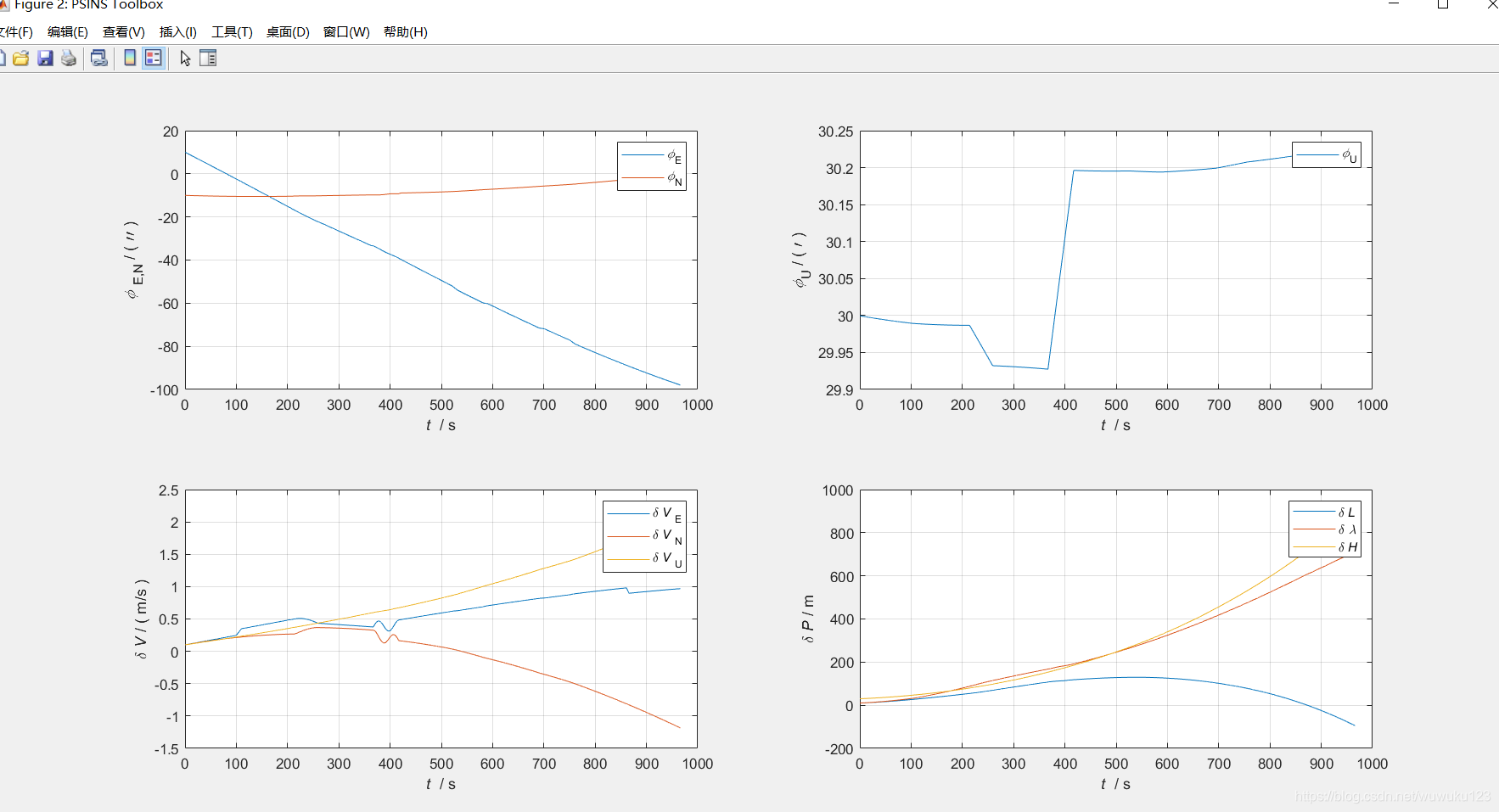
纯惯导解算:姿态、速度、位置误差
avperr = avpcmp(avp, trj.avp);
inserrplot(avperr);
姿态、速度、位置误差方程,误差状态传递求解 减去 纯惯导解算姿态、速度、位置参数得如下图:
inserrplot(avpcmp(xkk, avperr));
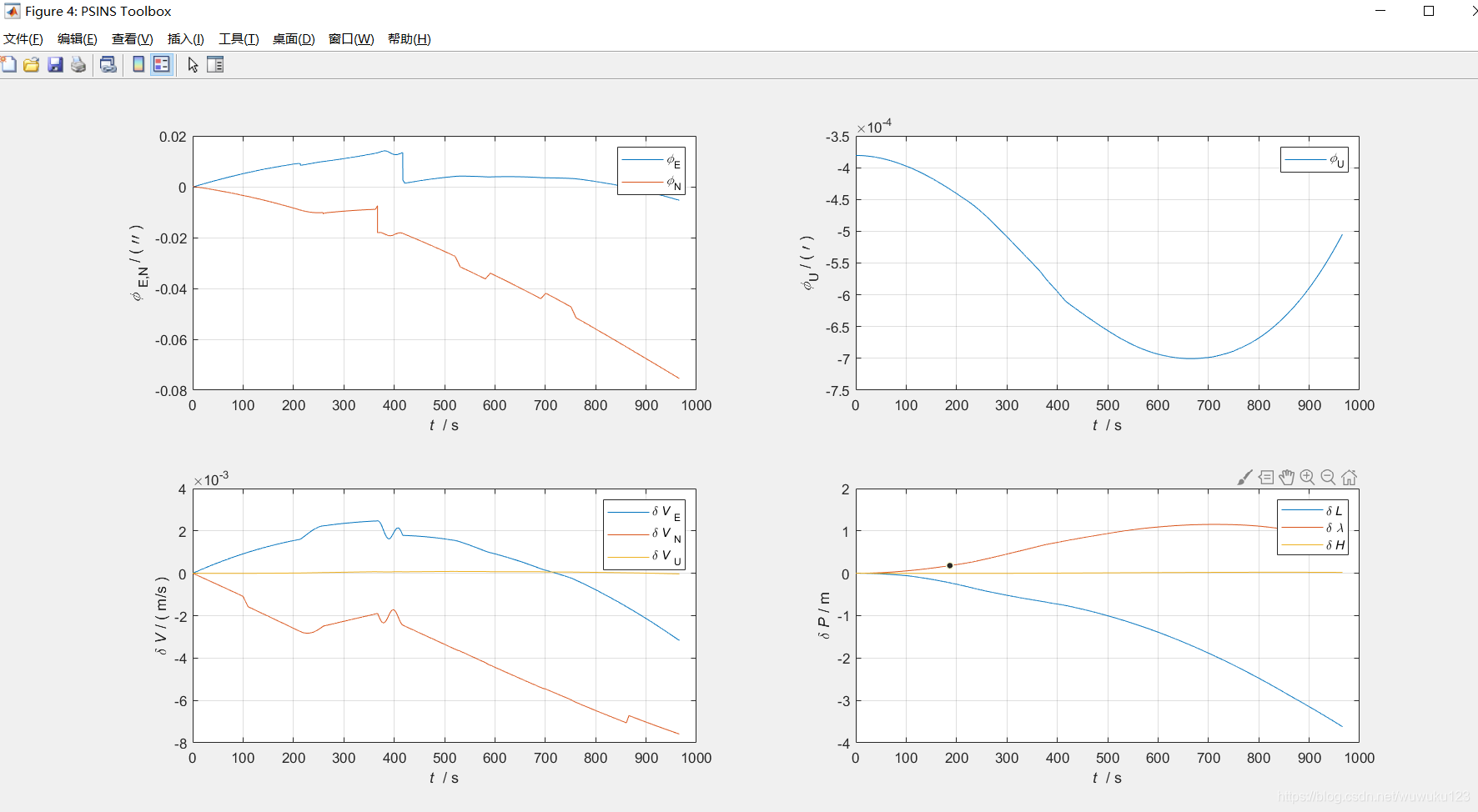
总结:两者相减误差比较小,可以忽略,验证误差传递方程的正确性!

















 328
328

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









