







-
背景:
导航坐标系:东-北-天
载体坐标系:右-前-上
欧拉角定义:3-1-2旋转,(航向角-俯仰角-滚转角),其中航向角北偏西为正,范围【-pi pi】
地球自转引起的导航系旋转:

因地球表面弯曲,载体在地球表面运动,导致导航系旋转:

重力矢量在地理坐标系的投影为:
-
对准条件:
初始对准一般是在运载体对地静止的环境下进行的, 即运载体相对地面既没有明显的线运动也没有角运动,且对准地点处的地理位置准确已知, 也就是说重力矢量 g 和地球自转角速度矢量ωie 在地理坐标系(初始对准参考坐标系)的分量准确已知,分别如下:

一、解析粗对准 alignsb.m
1、捷联惯导姿态微分方程和比力方程为:


又因为:


一般实际情况中,选择主矢量的原则通常是选择两个矢量中的重要性较大者(或者测量误差较小者),在对准中,一般加速度计测量误差优于陀螺仪,选择重力矢量和加速度计测量值作为主矢量;同时在计算矩阵之前,为了防止出现不正交现象,一般先将矢量进行正交化:


最终计算公式如下:

对准的极限精度为:

即:水平失准角的对准误差取决于加速度计的等效水平测量误差![]()
方位失准角的对准误差取决于陀螺的等效东向测量误差
[-imuerr.db(2);imuerr.db(1)]/glv.g0;-imuerr.eb(1)/(cos(avp(7))*glv.wie)]
- 仿真数据实现:
glvs
ts = 0.1; % sampling interval
T = 1000; %总时长1000秒、即16分钟.40秒
avp0 = avpset([0;0;0], [0;0;0], [30;108;380]); %初始姿态为0
imuerr = imuerrset(0.01, 100, 0.001, 1);
% imuerr = imuerrset(0.01, 100,0,0);
imu = imustatic(avp0, ts, T, imuerr); % IMU simulation
davp = avpseterr([-30;30;30], [0.01;0.01;0.01]*0, [1;1;1]*0); %只存在初始姿态误差;速度、位置误差为0
avp = avpadderr(avp0, davp);- 解析粗对准实现代码;
%% coarse align
[attsb, qnb] = alignsb(imu, avp(7:9));
phi = [aa2phi(attsb,[0;0;0]), [[-imuerr.db(2);imuerr.db(1)]/glv.g0;-imuerr.eb(1)/(cos(avp(7))*glv.wie)]]- 其中初始姿态角为[0 0 0 ],结果如下:

二、间接粗对准: aligni0.m
- 初始时刻载体惯性系(b0 ): 与初始对准开始瞬时的载体坐标系( b 系)重合, 随后相对于惯性空间无转动;
- 初始时刻导航惯性系(n0 ): 与初始对准开始瞬时的导航坐标系( n 系,即地理坐标系)重合, 随后相对于惯性空间无转动;
间接初始对准方法的关键是求解b0 系与 n0 系的方位关系,即Cnobo。

1、重力矢量在n0系上的投影为:
![]()
因为:
![]()

2、加速度计的比力输出在b0系投影为:

因为 Cb0为惯性系,而且IMU的输出是基于惯性系,所以Wbb0b=Wbib;

根据前述微分方程,如下:

将方程7.1-21b两边同时左乘Cn0n,得:

最终计算如下:

三、Kalman精对准:alignvn.m& alignfn.m
1、alignvn.m 以速度为量测的Kalman精对准
静基座下,捷联惯导速度更新解算即为速度误差,将其作为观测量,同时也是测量误差量;利用kalman量测方程完成对失准角的估计。
(1)简化的姿态、速度更新算法:


(2)简化的姿态、速度误差方程:

(3)初始对准状态空间模型:
将陀螺仪和加速度计的常值零偏扩展为状态量,状态空间模型如下:
系统的状态量为:[失准角、速度误差、陀螺仪逐次启动零偏稳定性、加速度计零偏]


(4)代码实现:
将粗对准得到的姿态角当作精对准的初始角度;
wvm = imu(k:k+nn-1,1:6);
[phim, dvbm] = cnscl(wvm);
Cnb = q2mat(qnb);
dvn = Cnn*Cnb*dvbm;
vn = vn + dvn + eth.gn*nts;
%qnb = qupdt(qnb, phim-Cnb'*eth.wnin*nts);
qnb = qupdt2(qnb, phim, eth.wnin*nts);
Cnbts = Cnb*nts;
kf.Phikk_1(4:6,1:3) = askew(dvn);
kf.Phikk_1(1:3,7:9) = -Cnbts; kf.Phikk_1(4:6,10:12) = Cnbts;
kf = kfupdate(kf, vn);
tag=0.4;tag1=1-tag;
qnb = qdelphi(qnb, tag*kf.xk(1:3)); kf.xk(1:3) = tag1*kf.xk(1:3);
vn = vn-tag*kf.xk(4:6); kf.xk(4:6) = tag1*kf.xk(4:6);
attk(ki,:) = [q2att(qnb)',imu(k+nn-1,end)];
xkpk(ki,:) = [kf.xk; diag(kf.Pxk)];function kf = avnkfinit(nts, pos, phi0, imuerr, wvn)
eth = earth(pos); wnie = eth.wnie;
kf = []; kf.s = 1; kf.nts = nts;
kf.Qk = diag([3*imuerr.web; 3*imuerr.wdb; zeros(6,1)])^2*nts;
kf.Gammak = 1;
kf.Rk = diag(wvn)^2;
kf.Pxk = diag([phi0; [1;1;1]; imuerr.eb; imuerr.db])^2;
Ft = zeros(12); Ft(1:3,1:3) = askew(-wnie); kf.Phikk_1 = eye(12)+Ft*nts;
kf.Hk = [zeros(3),eye(3),zeros(3,6)];
[kf.m, kf.n] = size(kf.Hk);
kf.I = eye(kf.n);
kf.xk = zeros(kf.n, 1);
kf.adaptive = 0;
kf.xconstrain = 0; kf.pconstrain = 0;
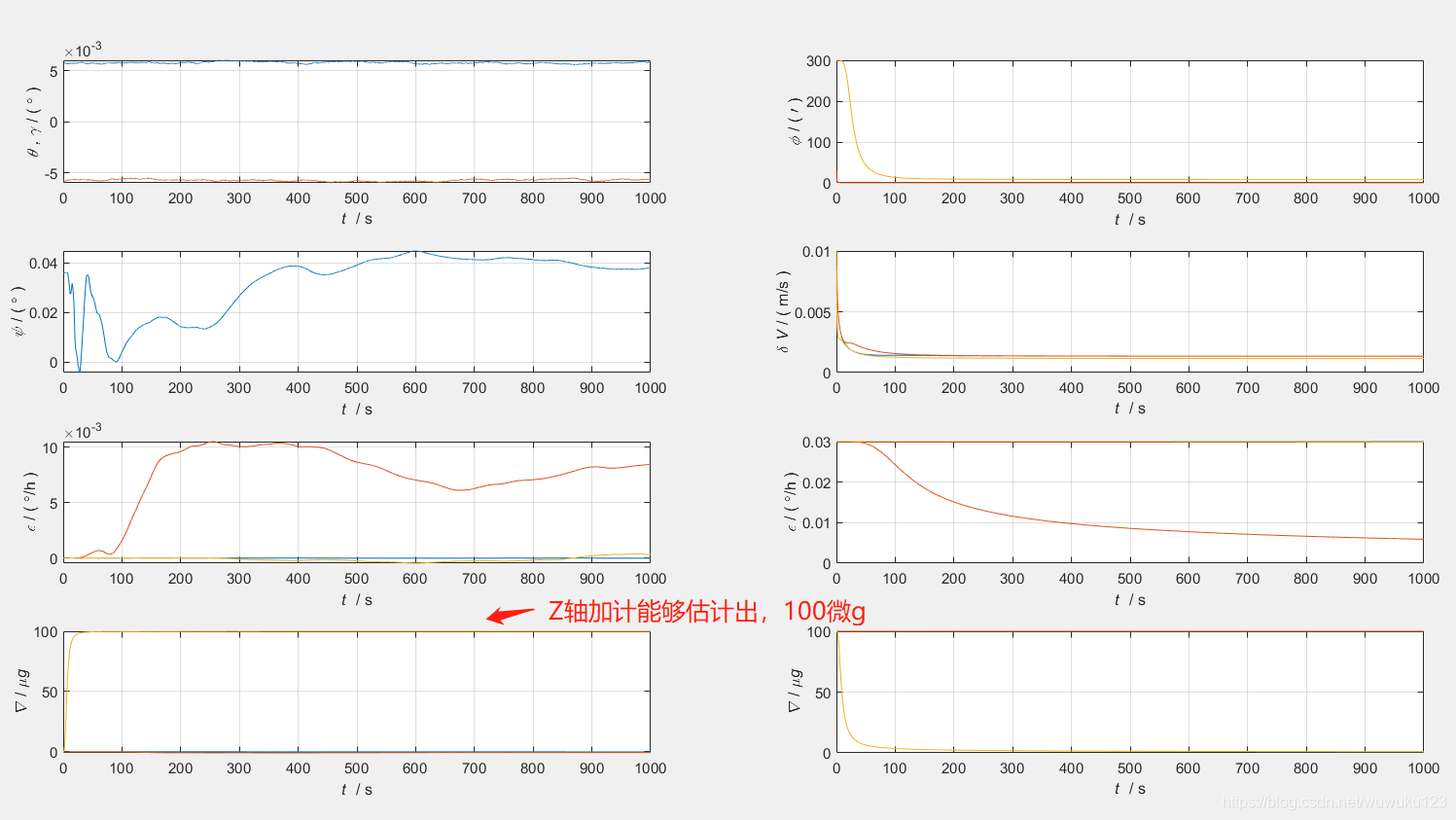
kf.fading = 1;(5)结果实现:
| 粗对准的结果(°) | 精对准的结果(速度为观测量)(°) |
| 0.005750544250598 | 0.005782319297423 |
| -0.005835008798230 | -0.005683278866238 |
| 0.038523957584313 | 0.045178296080427 |
2、alignvfn.m 以比力为量测的Kalman精对准
静基座下,加速度计输出比力作为观测量;测量误差量为:比力 - 速度误差方程;
(1)加速度计输出比力和捷联惯导更新的速度作为量测,其主要区别在于转移矩阵和量测矩阵的建立;
加速度计输出比力中,状态量为 [phiE, phiN, phiU, eby, ebz];
通常,静基座下,东、北向加速度计、东向陀螺仪是不可观的;因此,此处没有选择东向陀螺仪作为状态量;
- 转移矩阵为:
Ft = [ 0 wU -wN 0 0
-wU 0 0 -1 0
wN 0 0 0 -1
zeros(2,5) ];
- 量测矩阵为:
kf.Hk = [ 0 -g 0 0 0
g 0 0 0 0 ];
量测方程的建立,根据速度误差方程和静基座下(近似),fn=-gn;


将上式误差状态方程展开如下:

(2)代码实现:
- 状态转移矩阵和量测矩阵:
function kf = afnkfinit(nts, pos, phi0, imuerr)
eth = earth(pos);
kf = []; kf.s = 1; kf.nts = nts;
kf.Qk = diag([imuerr.web; 0;0])^2*nts;
kf.Rk = diag(imuerr.wdb(1:2)/sqrt(nts))^2;
kf.Pxk = diag([phi0; imuerr.eb(1:2)])^2;
wN = eth.wnie(2); wU = eth.wnie(3); g = -eth.gn(3);
Ft = [ 0 wU -wN 0 0
-wU 0 0 -1 0
wN 0 0 0 -1
zeros(2,5) ];
kf.Phikk_1 = eye(5)+Ft*nts;
kf.Hk = [ 0 -g 0 0 0
g 0 0 0 0 ];
[kf.m, kf.n] = size(kf.Hk);
kf.I = eye(kf.n);
kf.xk = zeros(kf.n, 1);
kf.adaptive = 0;
kf.fading = 1;
kf.Gammak = 1;
kf.xconstrain = 0;
kf.pconstrain = 0;- Kalman滤波器时间和量测更新:
wvm = imu(k:k+nn-1, 1:6);
[phim, dvbm] = cnscl(wvm);
fn = Cnn*qmulv(qnb, dvbm/nts);
qnb = qupdt(qnb, phim-qmulv(qconj(qnb),eth.wnie)*nts); % att updating
kf = kfupdate(kf, fn(1:2));
tag=0.1;tag1=1-tag;
qnb = qdelphi(qnb, tag*kf.xk(1:3)); kf.xk(1:3) = tag1*kf.xk(1:3); % feedback
attk(ki,:) = q2att(qnb)';
xkpk(ki,:) = [kf.xk; diag(kf.Pxk)];(3)结果实现:
| 粗对准的结果(°) | 精对准的结果(速度为观测量)(°) |
| 0.005722167719818 | 0.005687376038254 |
| -0.005724676591646 | -0.005754972245868 |
| 0.029101368855361 | 0.030922843858521 |

参考:
《捷联惯导系统静基座初始对准精度分析及仿真》














 663
663











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









