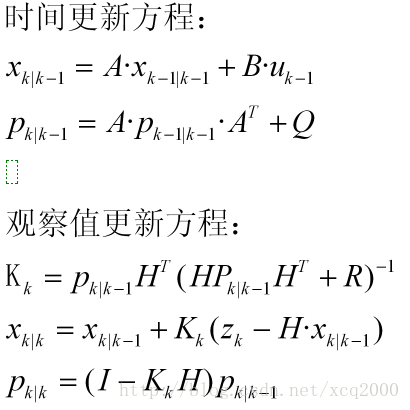
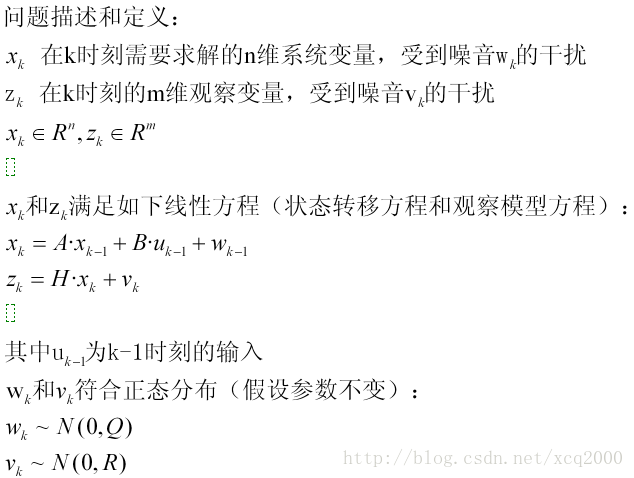
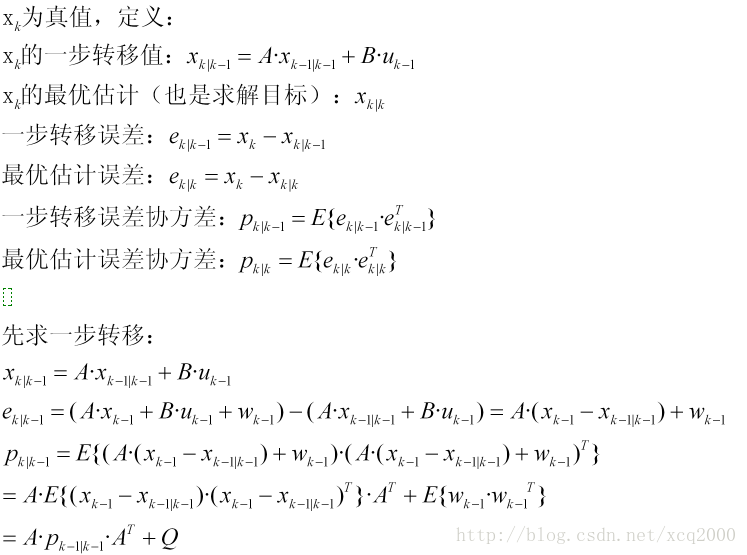
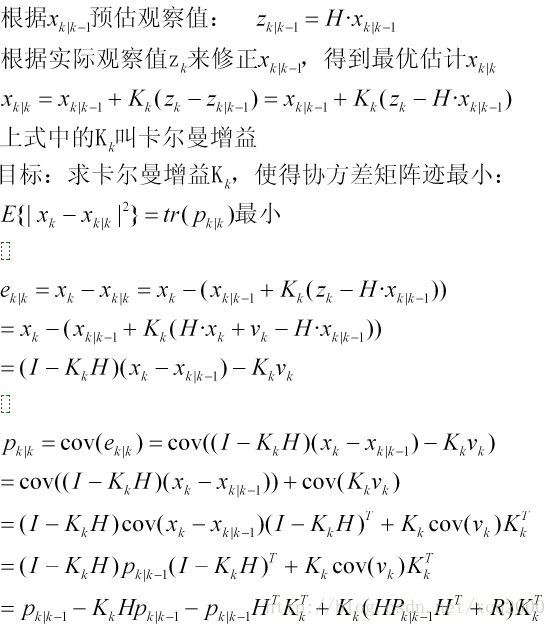
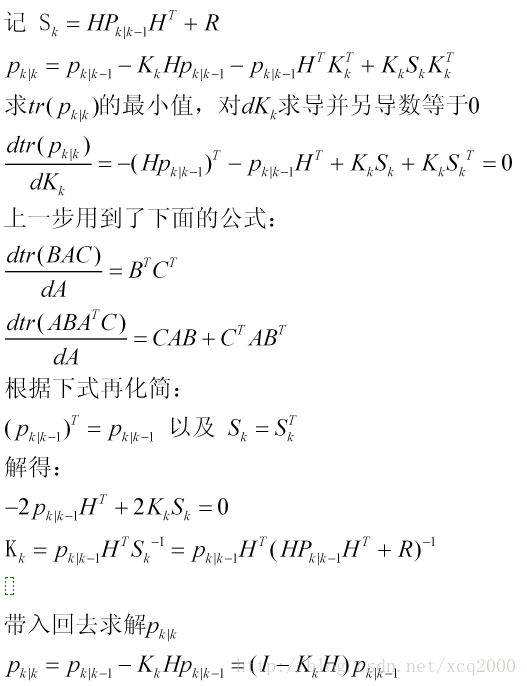
卡尔曼滤波在机器人定位,SLAM等方面需要用到,公式自己推一遍能更加深入理解。这个是基于线性系统的基本公式,实际应用中需要把非线性系统通过泰勒公式求导展开近似线性化。
总结:
卡尔曼滤波在机器人定位,SLAM等方面需要用到,公式自己推一遍能更加深入理解。这个是基于线性系统的基本公式,实际应用中需要把非线性系统通过泰勒公式求导展开近似线性化。
总结:
 1万+
4012
1万+
4012











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言