






基于扰动观测器的伺服系统摩擦补偿Matlab仿真
1.模型简介
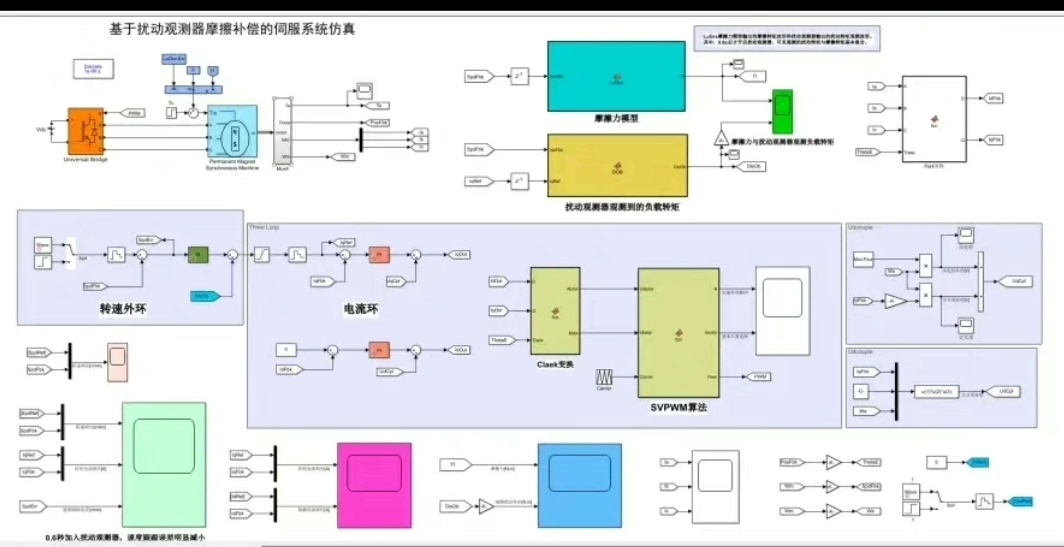
模型为基于扰动观测器的摩擦补偿仿真,仿真基于永磁同步电机速度、电流双闭环控制结构开发,双环均采用PI控制,PI参数已经调好。
仿真中主要包含抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM、逆变器和永磁同步电机模块等,其中抗饱和PI控制器、摩擦力模型、扰动观测器、坐标变换、SVPWM模块均采用matlab function编程实现,其与C语言编程较为相似,容易进行实物移植。
模型均采用离散化仿真,其效果更接近实际数字控制系统。
2.算法简介
伺服系统中,由于摩擦力的存在,会降低系统响应,因此对摩擦力进行补偿是有必要的。
本仿真通过增加LuGre摩擦力模型,模拟摩擦力对系统性能的影响。
通过扰动观测器对摩擦力进行观测并进行补偿,降低摩擦力对系统性能的影响。
3.仿真效果
① 加入摩擦力,速度给定为正弦波,模拟速度反复过零的情况。
由于摩擦力的存在,实际速度过零时不能很好的跟踪速度给定信号,如图1所示,0.6s前没有使用扰动观测器,速度过零时,速度跟踪误差很大。
0.6s后,开启扰动观测器,速度跟踪误差明显减小。
② 图2为电流环响应波形,可见电流环跟踪很好。
③ 图3为LuGre摩擦力模型输出的摩擦转矩波形和扰动观测器输出的扰动转矩观测波形。
其中,0.6s后才开启扰动观测器。
可见观测的扰动转矩与摩擦转矩基本重合。
4.
可提供模型内相关算法的参考文献,避免大 量阅读文献浪费时间。
【注】 模型已搭建完毕,原则上不会做任何修改。
ID:93100817267072965
法国干瞪眼的红参
相关的代码,程序地址如下:http://matup.cn/817267072965.html
















 939
939

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









