







专栏目的及认识激光雷达SLAM
一、专栏目的
大家好!介绍一下博主自己,感知算法工程师,点云方向,但苦于初入职场,在学校学习的东西还是不能满足于工作的需要,因此创造本专栏进行学习,这个激光雷达SLAM方向是一个很不错的方向,前途和钱途都不错,最重要的是我感觉这个方向非常蒂花之秀,能够让人喊我大佬的秀,因为多方
多钱考虑之下选择这个方向。此外,为什么选择CSDN这个平台进行创造,因为我喜欢有读者问我问题,这样可以满足我的虚荣感,但是我不会的也不会特意再去看,然后回答,哈哈哈哈哈哈哈,问我问题就得看缘分,看我还记不记得。
二、初始激光雷达SLAM
激光雷达SLAM(Simultaneous Localization and Mapping,即同时定位与地图构建)是一种用于机器人和自动驾驶系统的技术。它的主要目标是在未知的环境中,通过使用激光雷达等传感器来同时确定机器人的位置(定位)和构建环境地图。特别说明一下,本文可能偏重于自动驾驶行业中的激光雷达SLAM,和用于机器人的激光雷达SLAM有少许不同:
- 定位(localization) :通过分析激光雷达扫描的数据,机器人可以估计自身相对于环境的位置。这是通过将机器人当前观察到的地标与事先构建的地图进行匹配来实现的。定位的准确性对于机器人在环境中正确导航至关重要;
- 地图构建(Mapping) :机器人利用传感器数据构建环境地图。这可以是二维地图或者三维地图,取决于所使用的的传感器和应用的需求,地图的构建可以是静态的,也可以随着时间的推移不断更新,来适应环境的变化;
- 在SLAM中,使用的传感器不仅仅局限于激光雷达,还可以包括相机、惯性测量单元——IMU等。不同的SLAM系统可能采用不同的算法和技术,例如扩展卡尔曼滤波(EKF-SLAM)、粒子滤波SLAM、图优化SLAM等,以处理不同的环境和传感器数据。
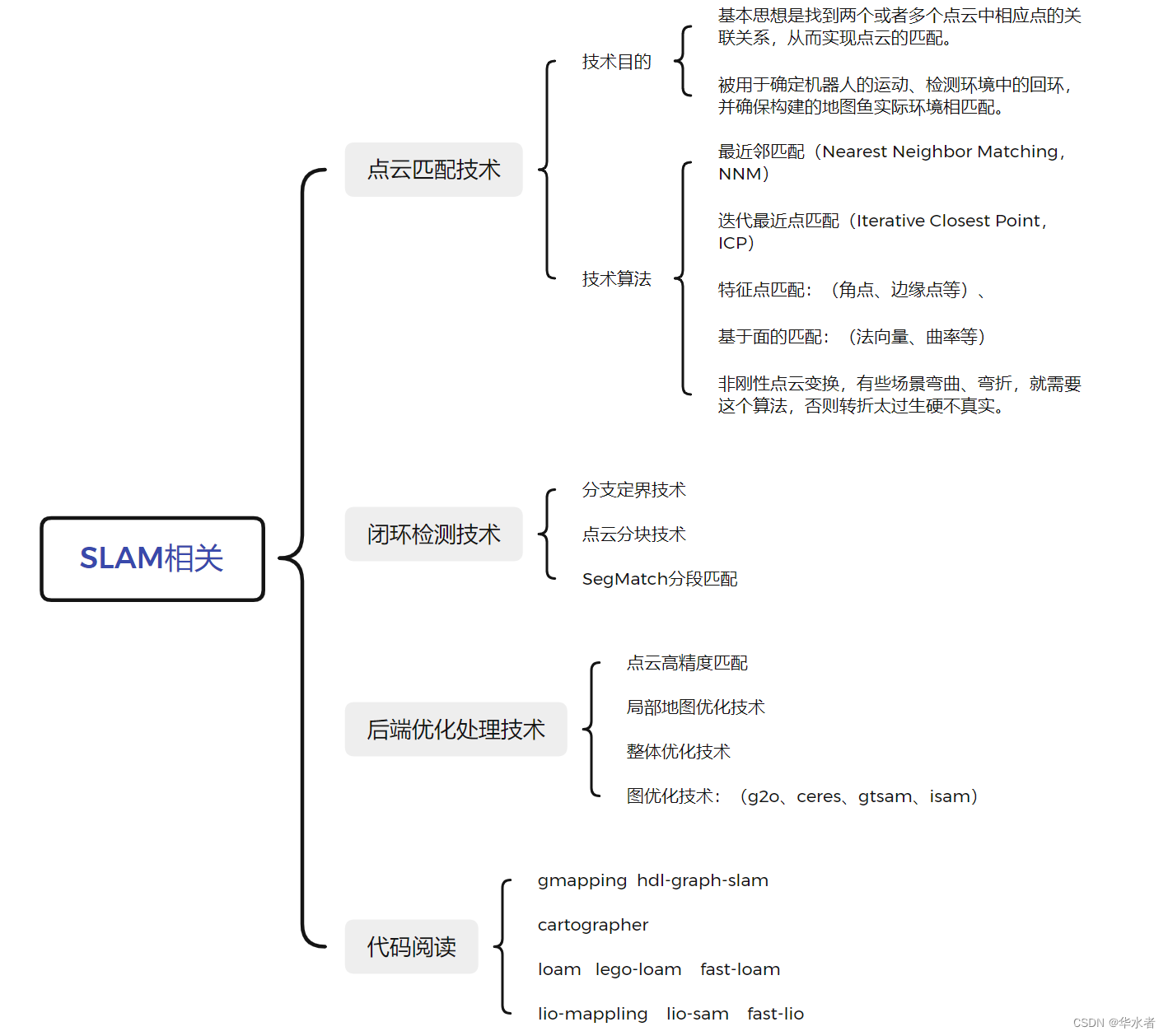
1、激光雷达SLAM算法相关知识点
主要有个大概了解就好,我一眼看上去也萌萌的,后面再具体了解
2、SLAM常见问题1
- 墙体分层
墙面有多个点云层,不符合场景。需要后处理优化 - 墙体过厚
墙体点云过厚。可以利用时间同步、标定、后处理优化,如果利用GPS效果会更好。 - 上下对齐
多次采集的区域,或者有上下两层的区域,经常出现地面分层的问题,需要经过后处理优化。 - 回环错位
重复采集的区域容易出现重复,回环错位的问题。 - 通道后退
采集的通道点云数据,经常出现通道缩短现象,需要经过后处理优化。
3、激光雷达SLAM的需求点
- 实时性
实时处理数据建图与定位; - 强调现在
不管我之前SLAM准不准,我要求现在是准确的。 - 定位精度
机器人SLAM更多要求定位精度,其他测绘SLAM强调建图精度。 - 相对位置
机器人SLAM一般要求相对位置,测绘SLAM要求带地图投影的绝对坐标。
4、RTK在SLAM中的作用
RTK是实时运动定位(Real-Time Kinematic),一种高精度的全球定位系统(GNSS)技术。RTK系统使用差分GPS或者北斗信号,通过基站或者移动站之间的差分测量,实现对移动站位置的高精度实时定位。在SLAM中,RTK可以用作辅助传感器,提供更精确的全局定位信息。SLAM通常使用如激光雷达、相机、和IMU来感知环境并构建地图,但这些传感器的测量容易受到累计误差的影响,导致定位不准确。
通过结合RTK提供的高精度全球定位信息,SLAM系统可以更好的纠正传感器误差,并提高定位的准确性。
- 全局定位增强
RTK提供的高精度定位信息可以作为全局定位的基准,帮助SLAM系统更准确地估计机器人在整个地图中的位置; - 闭环检测
RTK可以用于检测机器人是否返回到了先前访问过的位置,从而实现闭环检测。这对于减小SLAM系统中累积的定位误差非常重要。 - 地图校准
RTK观测值可以作为地面真值,对SLAM绝对精度进行验证。 - 导航和路径规划
高精度的定位信息有助于机器人更精确地导航和规划路径,特别是在需要遵循精确轨迹的应用中。 - RTK与SLAM的联用
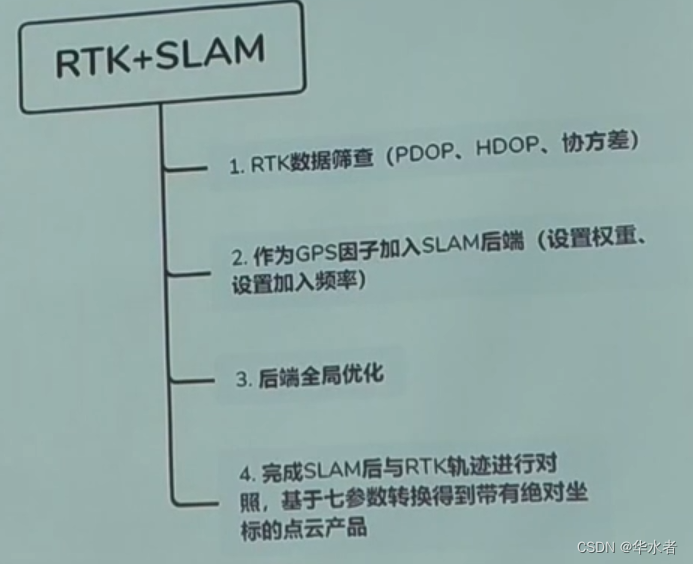
- RTK的缺点
- RTK结果包含,无效解、浮点解、固定解,即使固定解也不一定能够达到定位精度,甚至存在跳变,需要在使用前,对数据精度进行筛查。
-
5、激光雷达视觉紧耦合+图优化滤波紧耦合
- 在结构特征丰富的环境,充分利用激光雷达信息
- 在纹理特征丰富的环境,充分利用视觉信息
- 在GNSS信号良好情况下,用组合导航
- 在GNSS信号确实的情况下,用SLAM
引自第七届全国激光雷达大会,首都师范大学钟若飞教授的演讲。 ↩︎















 3161
3161











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









