







前言
复现sx的代码,记录一下需要修改的地方以及遇到的问题。复现之前,一定要把相应环境配置好。
提示:以下是本篇文章正文内容,下面案例可供参考
一、第三章实验
1.DynaYOLO
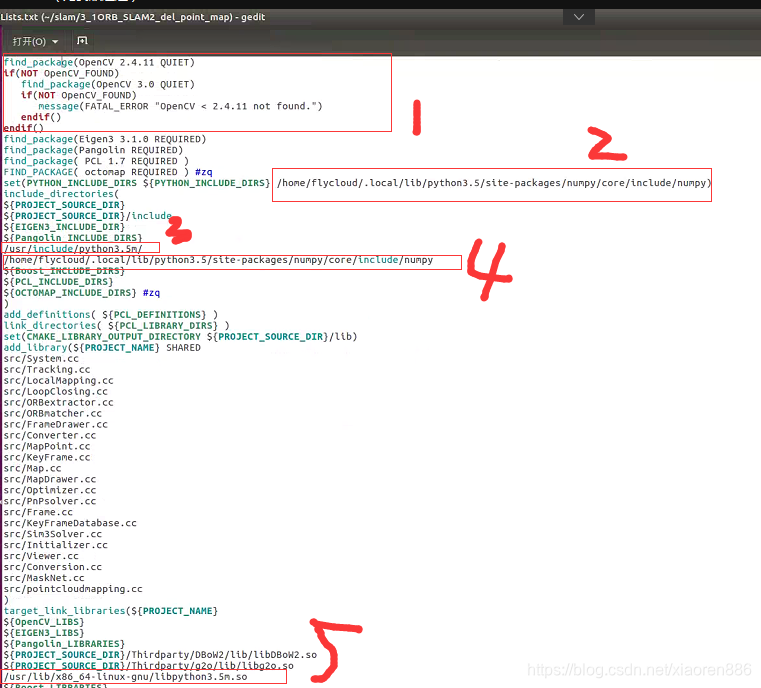
1.修改CMakeList.txt文件(5处)
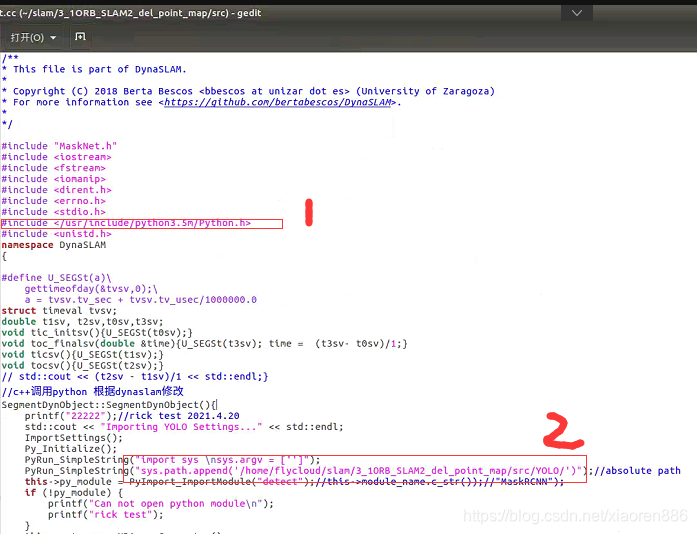
2.src/MaskNet.cc修改(两处)
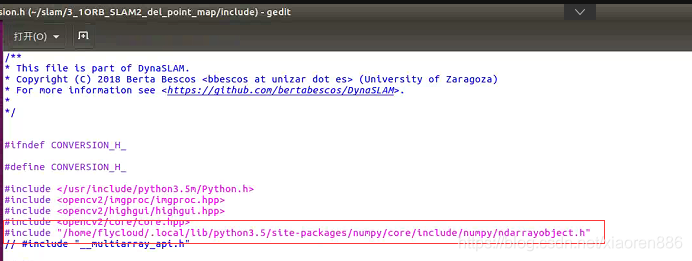
3.include/Conversion.;h修改(1处)
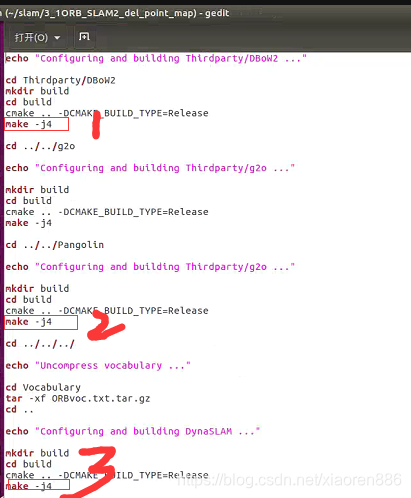
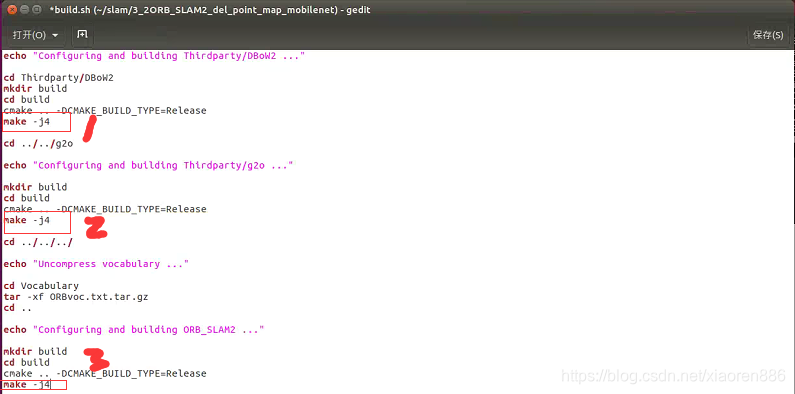
4.修改build.sh(三处)
make -j 修改为 make -j4
我运行make -j时机器会卡死,所以换成make -j4
5.删除当前文件中的build文件,删除/Thirdparty三个库中的build文件(共四处)

6.修改上述文件后,在当前目录下打开终端运行如下命令:
sh build.sh
7.编译成功后运行命令:
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTI00-02.yaml /home/flycloud/slam/00 ../data/output/
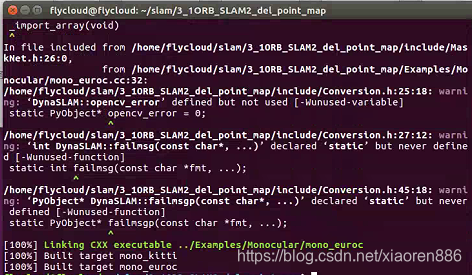
8.运行结果如下:
3
2.mobilenet
1.修改CMakeList.txt文件(4处)

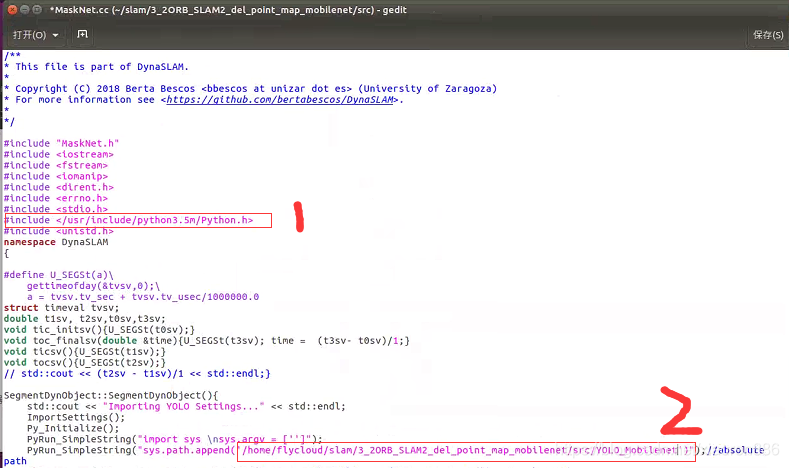
2.src/MaskNet.cc修改(两处)
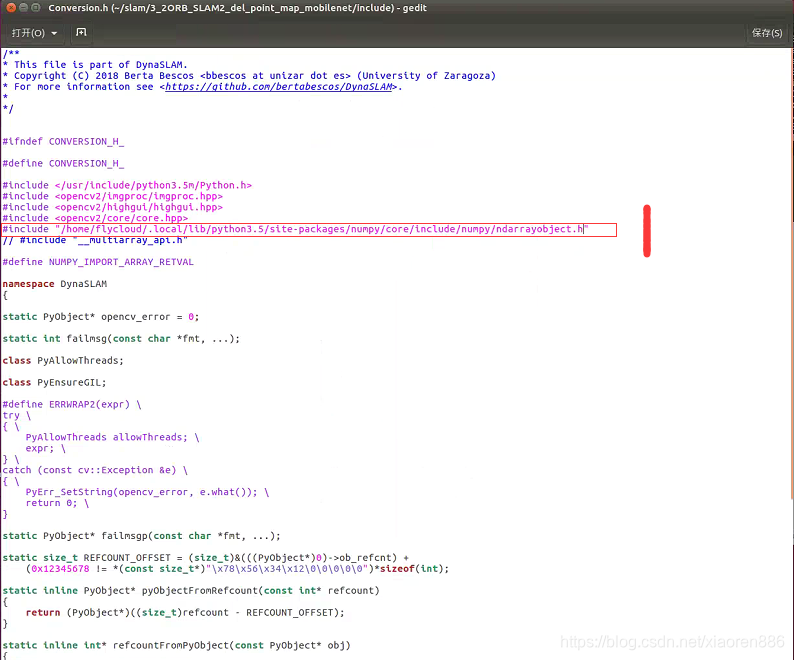
3.include/Conversion.;h修改(1处)
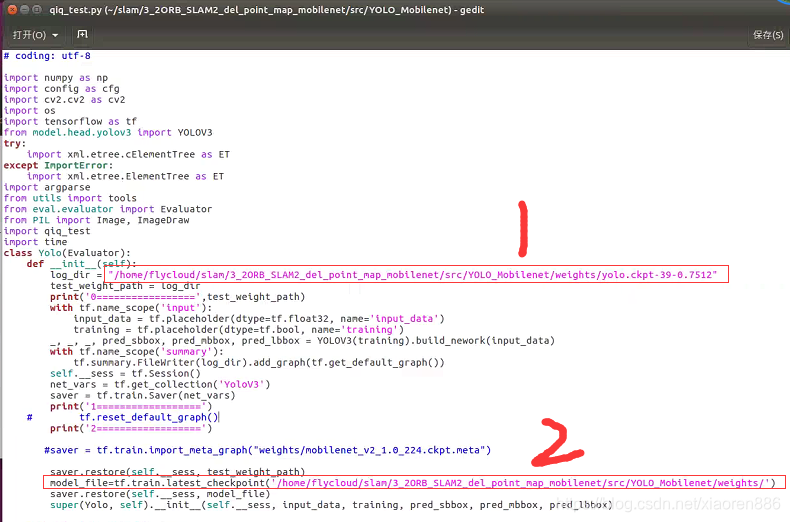
4.修改src/YOLO_Mobilenet/qiq_test.py(两处)
4.修改build.sh(三处)
make -j 修改为 make -j4
5.删除当前文件中的build文件,删除/Thirdparty三个库中的build文件(共四处)
6.修改上述文件后,在当前目录下打开终端运行如下命令:
sh build.sh
7.编译成功后运行命令:
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTI00-02.yaml /home/flycloud/slam/00 ../data/output/
8.运行结果如下:
ORB_SLAM2_del_point_map_mobilenet
二、第四章实验
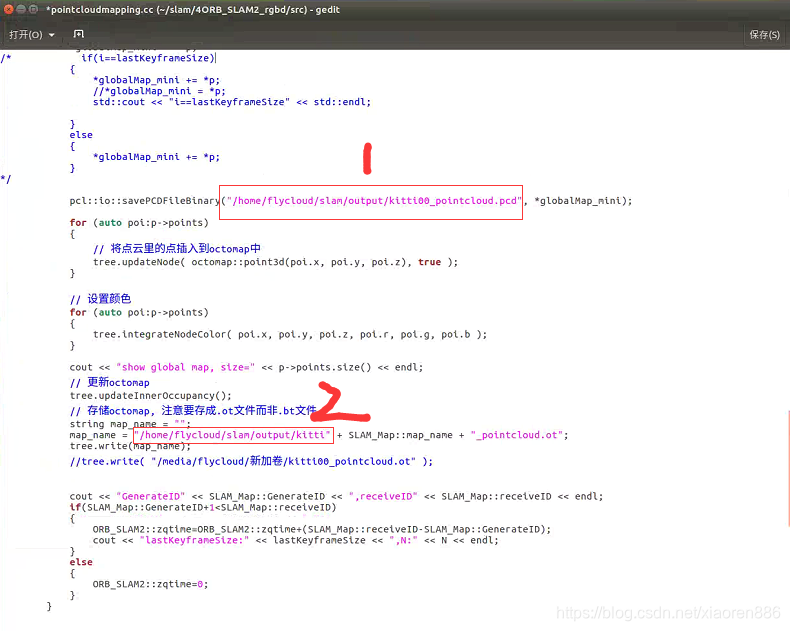
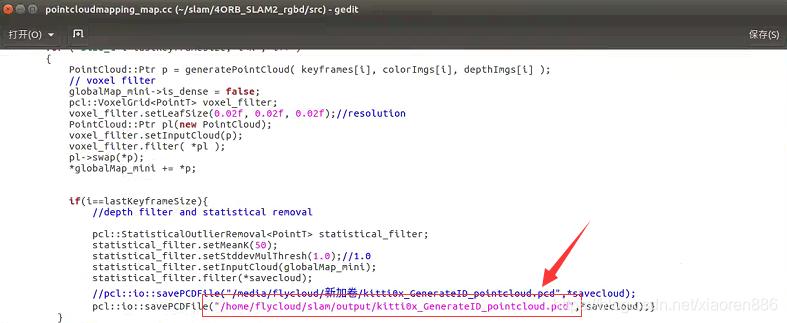
编译之前的工作和第三章实验差不多,只需要修改四个关于点云库的路径即可。
1.pointcloudmapping.cc
2.pointmapping_map.cc
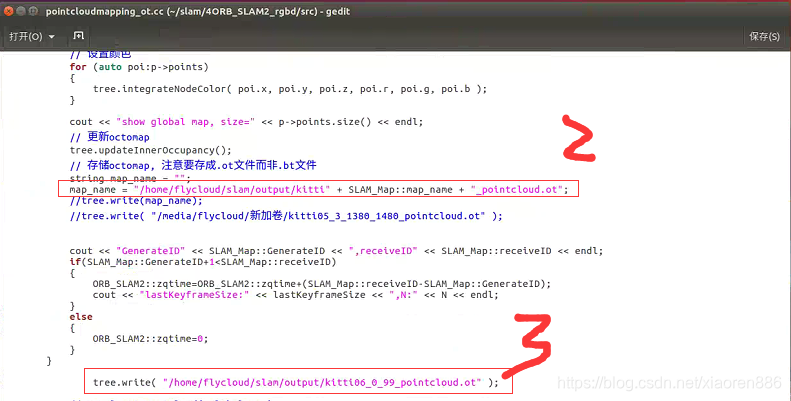
3.pointmapping_ot.cc
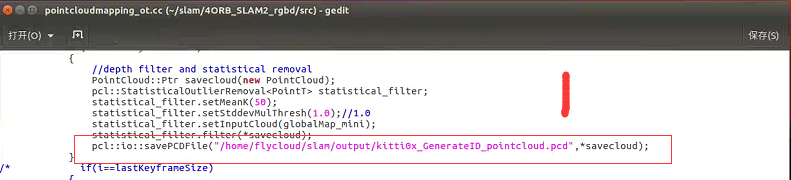
4.运行结束后,在/output文件下生成kitti00_pointcloud.pcd点云文件.
5.用pcl_viewer打开该文件。
pcl_viewer kitti00_pointcloud.pcd

6.跑程序过程
4ORB
二、第五章实验
编译之前的工作和第三章实验差不多,只需要修改四个关于点云库的路径即可。
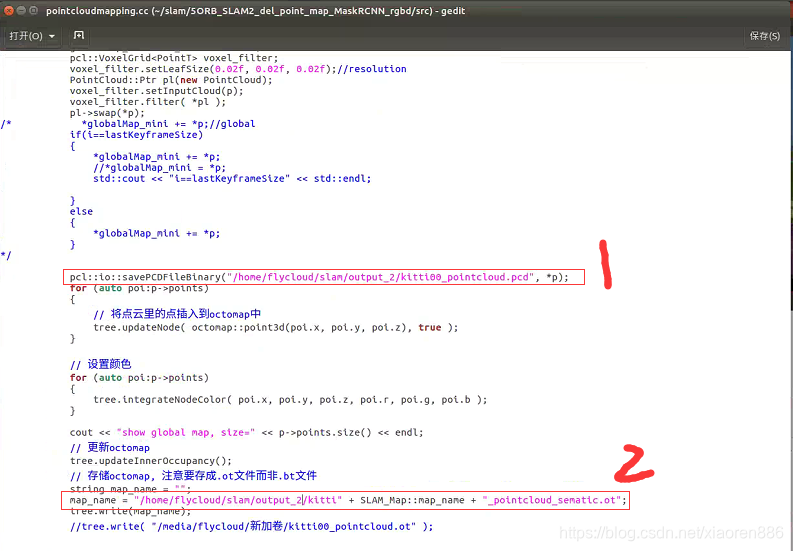
1.修改pointmapping.cc文件
2.执行下面命令运行程序
./Examples/RGB-D/rgbd_kitti Vocabulary/ORBvoc.txt Examples/RGB-D/kitti00-02.yaml /home/flycloud/slam/kitti_rgbd/01/ Examples/RGB-D/associations/kitti01.txt /home/flycloud/slam/kitti_rgbd/Mask_RCNN_result
3.输出结果,pcl点云库文件和.ot八叉树文件
4.跑代码过程
5ORB_SLAM2_del_point_map_MaskRCNN_rgbd
总结
以上就是对sx三个章节代码的复现。














 2159
2159











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









