






一.直流无刷电机(BLDC)
(1).极对数
27N30P指有27个槽,30的极数,它的极对数:30/2=15,所以是15对极。
N必须是3的倍数,P必须是偶数,
(2)电角度与机械角度
电角度是电气特性,机械角度是空间特性,必须指明是谁的。
电角度=机械角度*极对数
一个电角度周期是360,那么它的机械角度就是24(360/15),
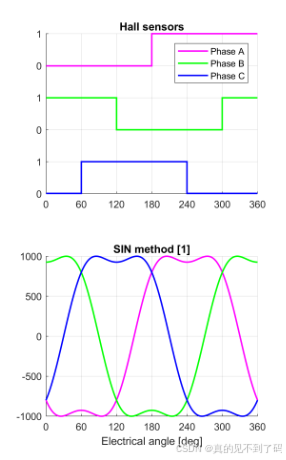
两个霍尔传感器事件(比如霍尔信号从101到001)的电角度是60(360/6)
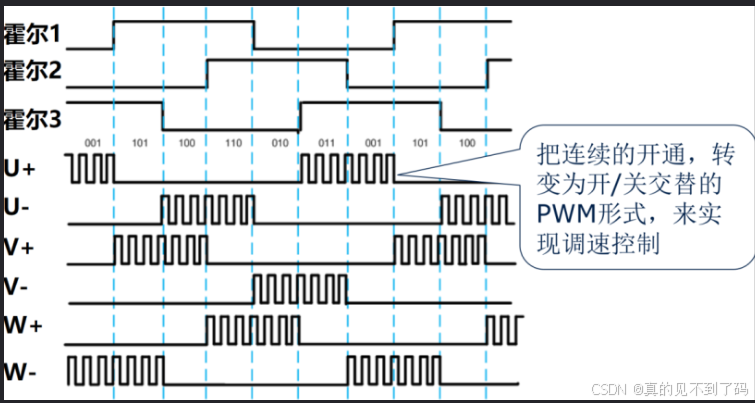
(3)六步换向
所以六步换向换一次向是机械角度4(24/6),电角度60

在六步换向中,实际上每换一次向,电机旋转了多少,跟它的磁场变化相关,
在常见的27N30P的电机中,换一次向电机旋转4°,所以他需要换向90次也就是15次六步换向的操作才会旋转一圈。其中的4°表示换向一次的机械角度,换向一次的电角度为60°。
电周期:从N极到S极再到N极,不同结构的电机需要的换向次数不同,而当前的电机要6次换向才过一个磁极对,所以60*6=360°。

上图中的霍尔信号是:101 也就是5 正转的话待让霍尔信号变成 001也就是1;所以我们此时控制AC项导通即可。正转:451326 反转:623154 右手定则判断磁场方向。左手判断通电导线在磁场中的运动方向。
每换向一次三相电动势变化60°。
所以旋转一圈需要15次六部换向,也就是三相电动势15个周期。
1rpm=2 * rad/min
1rps=2 * rad/s
1 rad/s=30/ rpm
霍尔信号采集的是转子磁铁磁场,所以转子不转,那么换向动作就不会发生。原理就是根据霍尔信号确定当前转子磁场(磁铁磁场,也就是转子位置),然后控制绕组产生想对应的牵引磁场。如果不转,那就加大电压和电流,可以通过调节占空比来实现。
有一个非常重要的事情,那就是如果程序没有调好不要轻易的的再硬件上跑,很容易烧板子,驱动板的上臂mos和下臂mos一定不能同时打开,否则短路报销2个mos管。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









