




DesnowNet: Context-Aware Deep Network for Snow Removal
1. 论文的研究目标与实际意义
1.1 研究目标
论文旨在解决单幅图像雪粒去除(Single Image Snow Removal)的复杂问题。与传统雨雾去除不同,雪粒(Snow Particles)具有多尺度、形状多样、半透明与不透明混合等特性。传统方法依赖手工设计的特征(如HOG、频率分离),而本文提出DesnowNet,通过多阶段深度网络分别处理半透明雪粒(Translucent Snow)和不透明雪粒(Opaque Snow),并结合颜色畸变图(Chromatic Aberration Map)和残差生成(Residual Generation)实现高精度去雪。
1.2 实际问题与产业意义
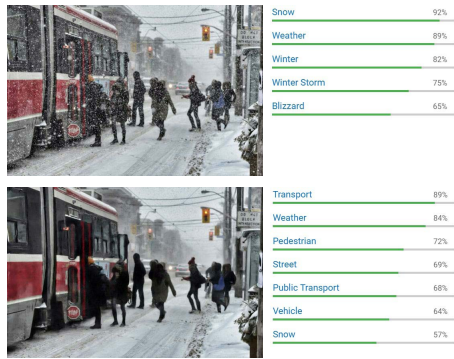
雪粒会严重降低图像可见性,影响自动驾驶、监控系统等计算机视觉应用的可靠性。例如,图1展示了Google Vision API对雪天图像(行人、车辆)的识别置信度显著下降:
高效去雪技术对以下领域至关重要:
- 智能交通:提升雪天环境下车辆感知能力;
- 安防监控:减少雪粒遮挡导致的误检漏检;
- 消费摄影:改善恶劣天气下的拍摄效果。
2. 论文的创新方法、模型与公式
2.1 DesnowNet的整体架构
DesnowNet由透射恢复模块(TR Module)和残差生成模块(RG Module)组成,其核心架构如图2所示:
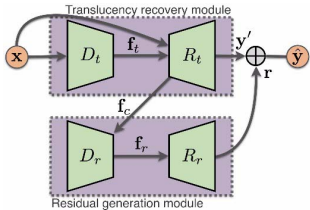
2.1.1 图像建模与核心公式
输入雪图 x x x可分解为:
x = a ⊙ z + y ⊙ ( 1 − z ) ( 1 ) x = a \odot z + y \odot (1-z) \qquad (1) x=a⊙z+y⊙(1−z)(1)
其中:
- y y y为无雪图像(目标输出),
- z z z为雪掩膜(Snow Mask)表示雪粒的透射率,
- a a a为颜色畸变图描述雪粒引起的颜色偏移,
- ⊙ \odot ⊙为逐元素乘法。
通过估计 z ^ \hat{z} z^和 a a a,恢复无雪图像 y ^ \hat{y} y^的公式为:
y ^ = y ′ + r ( 2 ) \hat{y} = y' + r \qquad (2) y^=y′+r(2)
其中 y ′ y' y′由TR模块生成, r r r由RG模块生成。
2.1.2 透射恢复模块(TR Module)
TR模块通过多尺度特征提取和金字塔最大输出(Pyramid Maxout)估计雪掩膜 z ^ \hat{z} z^和颜色畸变图 a a a:
-
多尺度特征提取:采用改进的Inception-v4作为骨干网络,结合空洞空间金字塔池化(Atrous Spatial Pyramid Pooling, ASPP)增强多尺度建模能力:
f t = ∥ n = 0 γ B 2 n ( Φ ( x ) ) ( 3 ) f_t = \left\|_{n=0}^{\gamma} B_{2^n}(\Phi(x)) \right. \qquad (3) ft=∥n=0γB2n
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2568
2568

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











