






大疆tello无人机是一款微小型无人机,可以支持多种开发模式。这里用的是ROS1的kinetic版本进行开发。参考文档来自http://wiki.ros.org/tello_driver
1)kinetic下tello源码安装
打开终端,键入以下命令进行二进制文件安装:
sudo apt install ros-kinetic-tello-driver然后进入到ros工作空间,下载tello驱动源码
cd ./catkin_ws/src
git clone --recursive https://github.com/appie-17/tello_driver.git
返回上一级进行编译
cd ..
catkin_make
source devel/setup.bash2)运行launch文件和发布指令
按下tello无人机的电源键,将电脑连上tello的WIFI(以Tello字段开头的WIFI名)。接着打开一个终端,运行launch文件:
roslaunch tello_driver tello_node.launch此时打开另外一个终端,键入以下命令,查看所有话题以及相应话题所需的数据类型(这里以起飞为例):
rostopic list
rostopic type /tello/takeoff然后可以进行话题的发布:
rostopic pub /tello/takeoff std_msgs/Empty同样也可以查看发布的话题,比如说打印出无人机状态数据:
rostopic echo /tello/status3)源码解读
打开launch文件可以发现,它运行了两个结点:

其中第一个节点就是tello的驱动代码。
驱动代码的框架还是比较清晰的:python代码的第一部分就是导入各种模块,这里也不例外。之后定义了两个class,分别是RospyLogger和TelloNode,第一个是用于记录警告、错误等信息,而第二个就是实例化tello。
实例化tello分为几步,首先定义一个初始化函数,进行参数获取和无人机连接:

以及话题的发布者、订阅者初始化:

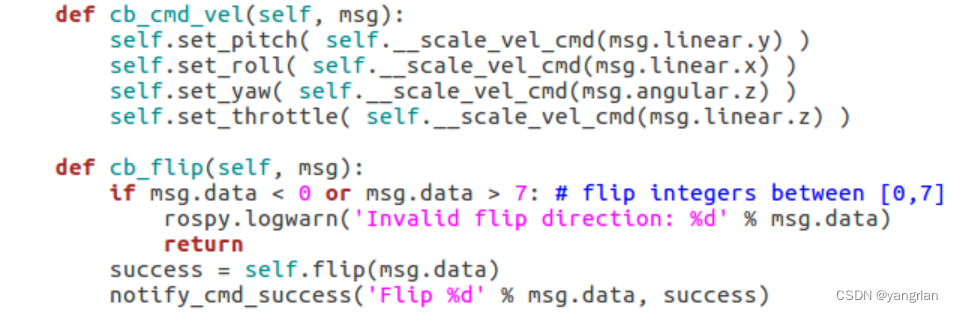
之后是被调用的各种函数的实现,大多是回调函数(以cb作为开头,callback):
最后以main函数收尾。















 888
888











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









