







VoxelNet

Key Knowledgeable:
- Feature Learning Network:
- Voxel Partition and Grouping
将D×W×H的空间按照大小为划分为逐个Voxel,处于一个Voxel的point分为一组。 - Random Sampling
选取一个阈值T,将一个Voxel内多余的点删去(减少计算量与避免Voxel点分布的过分不均) - Stacked Voxel Feature Encoding
将一个Voxel内的point进行相对位置编码:
(x,y,z为一个Voxel内的均值),使得每个点包含领域信息与位置信息为了后 续的逐点运算操作。
上述思路参考PointNet++:采样点,分组,捕获局部区域内的点与点的相对关系。

再通过FCN提取各个点的特征fi,并将各个点的fi进行Maxpooling之后的fi’与每个点的fi连接,获得每个点的领域信息聚合特征 - Sparse Tensor Representation
只计算非空Voxel(less than10%),同时非空Voxel也通过采样T个点将非空体素特征表示为稀疏张量
- Convolutional Middle Layers
常规的卷积,使用3D卷积扩大了感受野,通过领域信息与位置信息聚合的特征获得更多形状特征。 - Region Proposal Network

同样采用Multi-Scale的思想,使用2D卷积获得不同尺度的特征图,之后将不同尺度的特征图进行Deconv(Unsampling)转为统一尺寸之后拼接起来,映射成两个输出特征图进行probability与box的预测。 - Loss Function
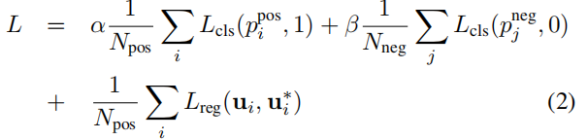
u为偏移信息(为anchor→box,为anchor→ground truth) - Efficient Implementation
通过Hash映射高效地创建一个Voxel Feature堆栈,删去了大量空Voxel,减少了空间与时间消耗。将稀疏分布在3D空间的点云信息转换为堆叠的密集分布的Voxel Feature















 1117
1117











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









