






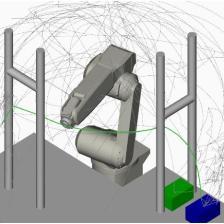
 本文介绍了Robotics Library(RL)中的碰撞检测算法,包括RL库集成的开源碰撞检测库如Bullet3、FCL等。RL通过.wrl模型进行碰撞检测,对于简单场景和复杂场景提供了相应的检测方法。在简单场景中,主要展示了使用Bullet库进行碰撞测试;而在复杂场景中,RL能够处理机器人连续运动时的碰撞检测,确保结果准确性。
本文介绍了Robotics Library(RL)中的碰撞检测算法,包括RL库集成的开源碰撞检测库如Bullet3、FCL等。RL通过.wrl模型进行碰撞检测,对于简单场景和复杂场景提供了相应的检测方法。在简单场景中,主要展示了使用Bullet库进行碰撞测试;而在复杂场景中,RL能够处理机器人连续运动时的碰撞检测,确保结果准确性。
本文介绍了Robotics Library(RL)中的碰撞检测算法,包括RL库集成的开源碰撞检测库如Bullet3、FCL等。RL通过.wrl模型进行碰撞检测,对于简单场景和复杂场景提供了相应的检测方法。在简单场景中,主要展示了使用Bullet库进行碰撞测试;而在复杂场景中,RL能够处理机器人连续运动时的碰撞检测,确保结果准确性。
本文介绍了Robotics Library(RL)中的碰撞检测算法,包括RL库集成的开源碰撞检测库如Bullet3、FCL等。RL通过.wrl模型进行碰撞检测,对于简单场景和复杂场景提供了相应的检测方法。在简单场景中,主要展示了使用Bullet库进行碰撞测试;而在复杂场景中,RL能够处理机器人连续运动时的碰撞检测,确保结果准确性。



 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1208
1208
10-28

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











