






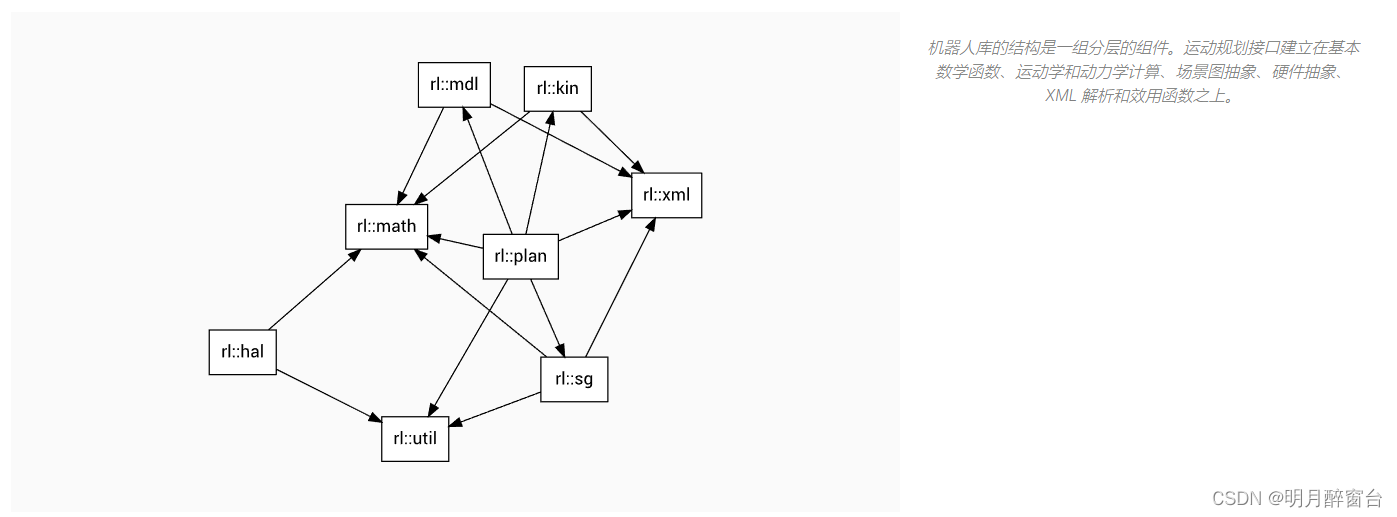
Robotics Library API(应用程序编程接口)介绍
完整的类层次结构和 API 可作为 Doxygen 文档提供。在本页中,我们对组件架构进行了相当高级的描述,并省略了Doxygen中定义的细节。对于 RL 的每个组件,给出了一些示例函数调用。
参考:Application Programming Interface
1. rl::math
基本的数学函数由RL的这一部分提供。向量和矩阵代数使用Eigen3,并为指定的实数表示提供方便的类型定义(在 中将双精度指定为默认值)。
Real.h
typedef double rl::math::Real;

 订阅专栏 解锁全文
订阅专栏 解锁全文















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











