








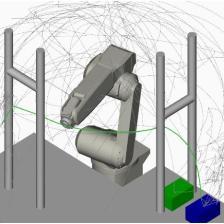
Robotics Library 之防碰撞demo rlCollisionTest
- RL库中的防碰撞模块主要通过对场景中的所有实物进行三维重建,通过判断每个模型有无碰撞实现碰撞检测
- 是在FCL基础上进行的研究,开源地址:https://github.com/flexible-collision-library/fcl
- FCL:灵活碰撞检测库,主要用于对几何模型执行接近和碰撞的查询检测,使用参考:https://flexible-collision-library.github.io/,支持C++、python,提供如下三种计算:
- 1.碰撞检测:检测两个模型是否重叠(以及可选的位置)。
- 2.距离计算:计算一对模型之间的最小距离。
- 3.连续碰撞检测:检测两个模型在运动过程中是否重叠(以及可选的接触时间)。
python使用参考:

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1637
1637

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











