







 本文是关于如何使用Autoware的Calibration Toolkit进行SICK TIM561 2D激光雷达和相机联合标定的详细教程。内容涵盖Calibration Toolkit简介、前期准备(包括激光雷达配置、Ubuntu静态IP设置、制作标定板和数据采集)、以及相机与雷达联合标定的步骤。教程特别适合于2D激光雷达和相机标定的新手。
本文是关于如何使用Autoware的Calibration Toolkit进行SICK TIM561 2D激光雷达和相机联合标定的详细教程。内容涵盖Calibration Toolkit简介、前期准备(包括激光雷达配置、Ubuntu静态IP设置、制作标定板和数据采集)、以及相机与雷达联合标定的步骤。教程特别适合于2D激光雷达和相机标定的新手。
2019/06/21更新说明:很多小伙伴反应从github上下载的Autoware没有Calibration Toolkit,是作者在github 的新源码和我用的版本不一样了。该教程仅针对2018年11月7日的发布版本。
网上Autoware的教程不多,而且都是关于多线的威力登雷达和相机的联合标定。自己摸索使用Autoware标定SICK TIM561单线激光雷达和相机的方法,写一个详细的教程,希望可以抛砖引玉。想要转载的小伙伴,请带个原文地址,撰写不易,Thanks♪(・ω・)ノ~
第一章 Calibration Toolkit简介
Calibration Toolkit工具是城市自主无人驾驶开源软件Autoware的其中一个工具,该工具专注于相机与2D/3D激光雷达的联合标定,可以在标定相机的同时自主计算出从相机坐标系至激光雷达坐标系的变换矩阵,具有操作简单、标定准确度较高的优势。
本文档仅针对Calibration Toolkit中相机与2D激光雷达的联合标定步骤进行说明。
第二章 工具详细使用说明
2.1 前期准备
2.1.1 激光雷达的选型与配置
撰写该文档时使用的激光雷达型号为 SICK tim561 单线激光雷达,如图 1 所示。

图 1 SICK tim561 单线激光雷达
将激光雷达与计算机相连,该款雷达首先需使用官方提供的 SOPAS Engineering Tool 在Windows 操作系统下配置 IP 地址,本文将激光雷达 IP 地址设置为 192.168.10.153,该 IP 地址仅用于举例说明。
完成激光雷达 IP 地址配置后,切换至 Ubuntu 操作系统,将 SICK 激光雷达的 ROS 驱动程序sick_scan-master 拷贝至 ROS 工作空间(通常为 catkin_ws 文件夹)下的 src 文件夹下,catkin_ws文件夹结构如图 2 所示。
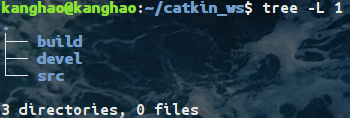
图 2 catkin_ws 文件夹结构
此时,进入catkin_ws/src/sick_sacn-master/sick_sacn-master/launch文件夹,找到sick_tim_5xx.launch文件,将该文件内<arg name="hostname" default="192.168.8.100" />参数中的192.168.100修改为设置的激光雷达IP地址,随后保存并关闭文件,本文为192.168.10.153。
返回至catkin_ws文件夹,在文件夹空白处按住Sifht按键后点击鼠标右键选择“在此启动终端”,在终端输入catkin_make进行编译,等到编译完成即可,至此激光雷达配置完毕。
2.1.2 Ubuntu 设置静态 IP
完成上述激光雷达配置后,还需配置 Ubuntu 的静态 IP 地址与激光雷达 IP 地址处于同一网段。Ubuntu 系统设置静态 IP 的步骤为:
使用组合按键 Ctrl+Alt+T 打开终端,在终端输入 ifconfig 查看网卡及 IP 地址,如图 3 所示,其中红色框中显示的为网卡的名称。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1855
1855

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









