







 本文详细描述了如何通过录制设备上的相机和激光雷达数据进行离线标定,包括加载数据、选择话题、设置调试界面、选取关键帧以及生成和优化标定结果的过程。着重强调了静止状态下抓取关键帧的重要性以保证数据同步,并提到了重投影误差作为评估标定质量的指标。
本文详细描述了如何通过录制设备上的相机和激光雷达数据进行离线标定,包括加载数据、选择话题、设置调试界面、选取关键帧以及生成和优化标定结果的过程。着重强调了静止状态下抓取关键帧的重要性以保证数据同步,并提到了重投影误差作为评估标定质量的指标。
标定的方法,选择离线标定
把数据从设备上录下来,主要是录制相机与激光雷达的数据。
标定板最好往前伸一段距离,可以更好在点云中选取属于标定版的点云
标定流程
加载数据
在一个终端开roscore
然后就是播放数据包后按空格暂停。(播放包的时候需要将点云话题改成/points_raw)
rosbag play camera_lidar.bag /velodyne_points_b:=/points_raw
然后启动标定程序
source devel/setup.bash
rosrun calibration_camera_lidar calibration_toolkit
选择数据包中的图像话题,然后选择camera -> velodyne,进行相机雷达标定
设置调试界面
相机图像界面没有什么好调的,主要是调标定版的参数。
我的标定板是0.03米,9行12列,所以参数设置的是8和11。
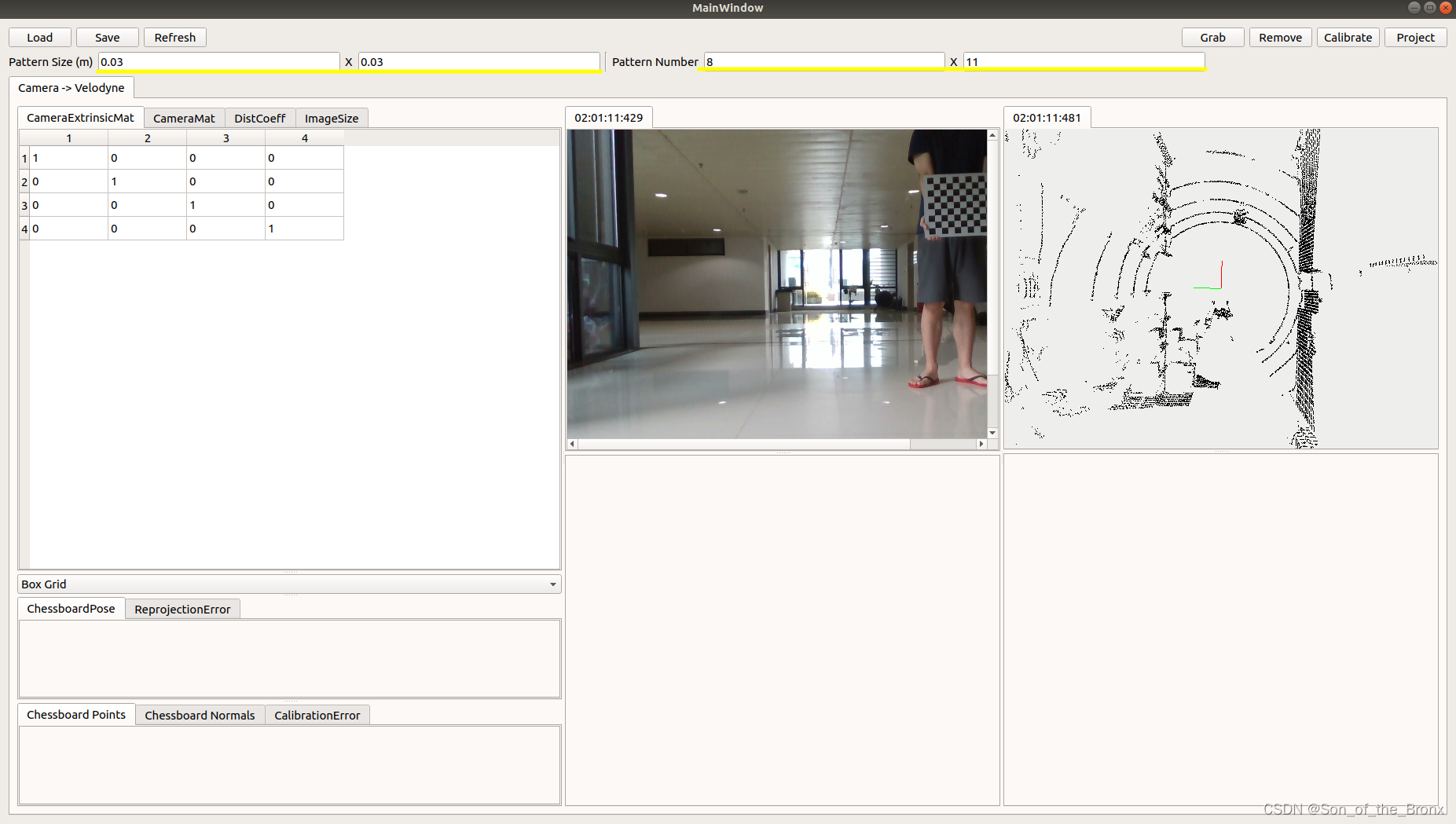
点击点云的区域,首先按b把背景调成白色。o,p可以调整点云点的大小。然后就是q,w,e,a,s,d,上下左右方向键,还有pgup和updn这两个键,通过这些调节点云的位置,方便去框选点云中属于标定板的点。(鼠标滚轮可以调整灵敏度)
截取关键帧
截取关键帧的时候,尽量选择静止时候的去抓取grab,因为相机与雷达数据时间并不是同步的,如果标定版是静止的话,可以认为图像与点云是同步的。
(小tips:当播放到你认为可以识别到标定板的帧,直接按空格将数据包播放暂停,再去点界面右上角的grab,注意不要一直连续按grab,不然程序会自动退出)
截取到关键帧后,可以暂停数据,在右下角的点云中点击选取属于标定版的点云。红色线即为选择的点云。
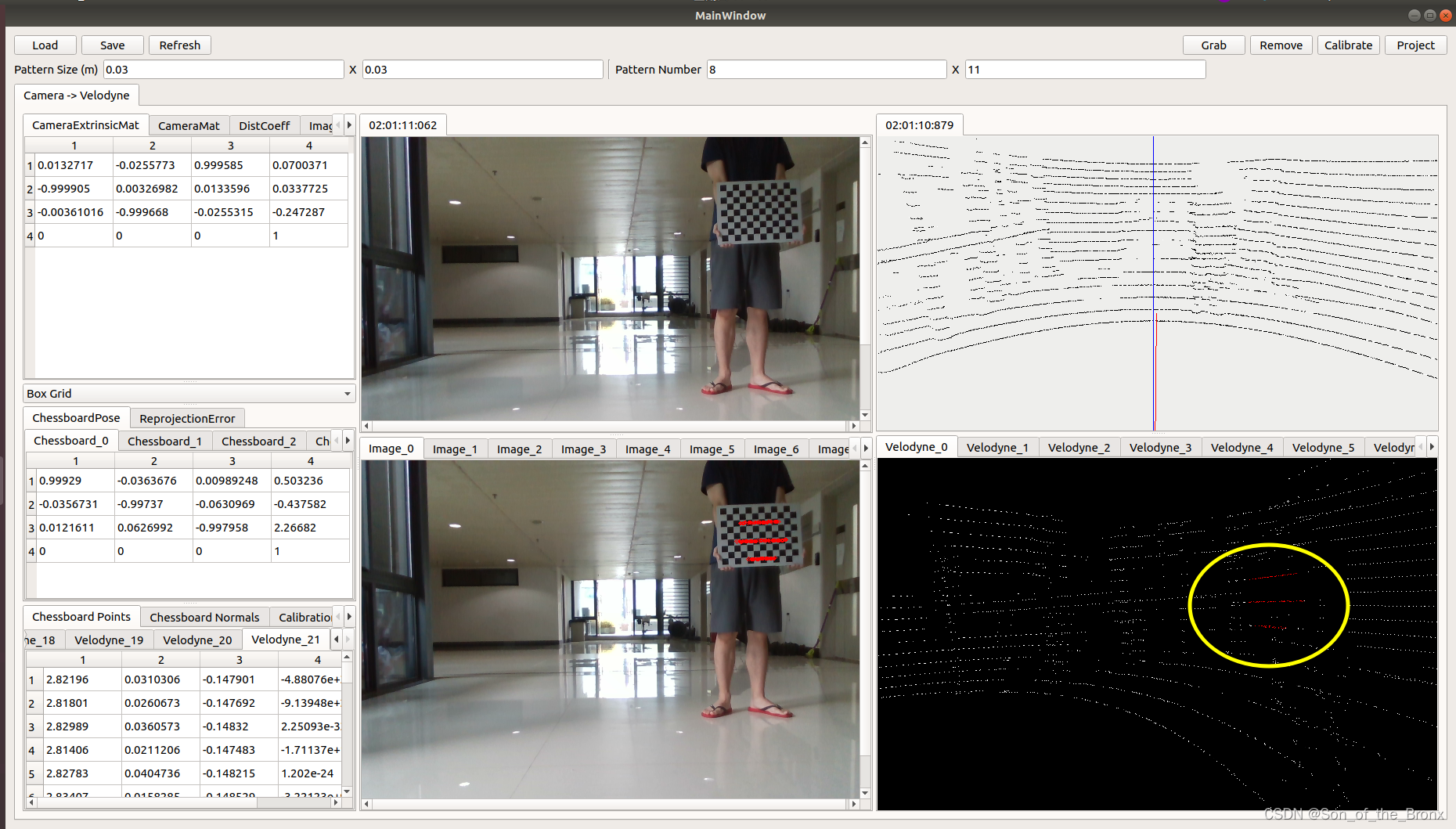
产生标定结果
当grab的关键帧到达20个以上的时候,就可以进行标定。标定之前需要注意,是否每一个grab的点云都有选取属于标定板的点云,可以方便的在左下角表格上快速查看。
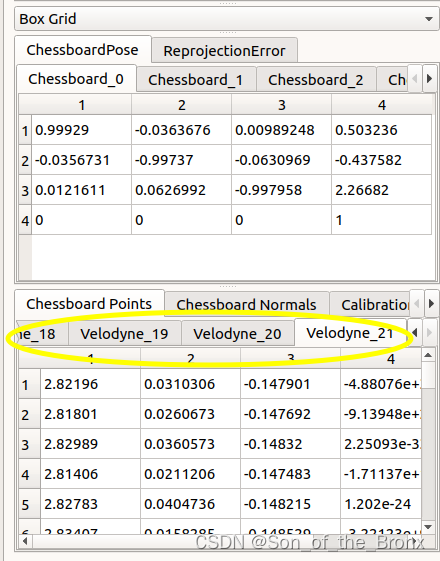
在我这里的话就是21个关键帧,必须确定每一个点云都有数据(如果没有选择属于标定板的点云,这个表格是空的,就是没有数据,对标定结果有影响)。然后点击右上角的标定(calibrate),等待一下就会在左边出现标定结果。
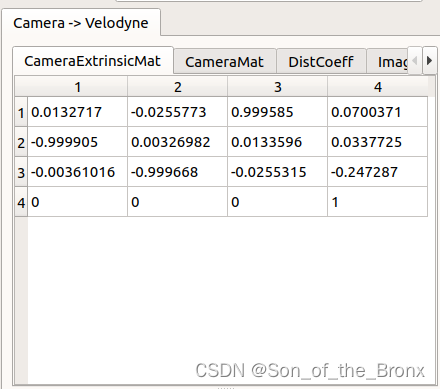
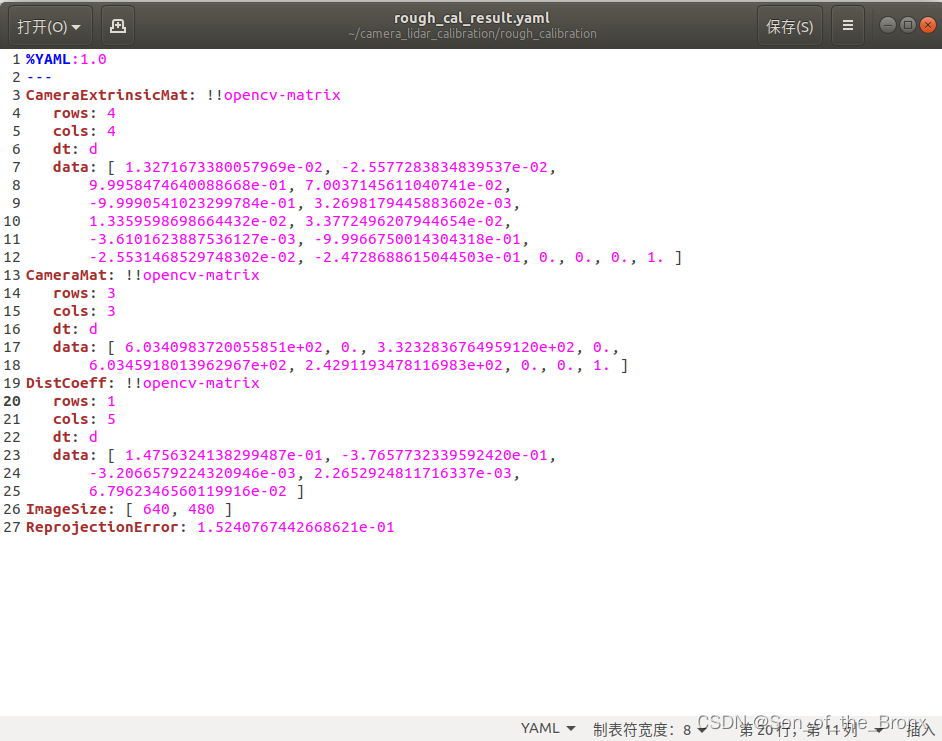
这个就是标定好的相机雷达外参。
可以点击右上角的project,将计算出来的外参将选取的点云投影到标定板上。
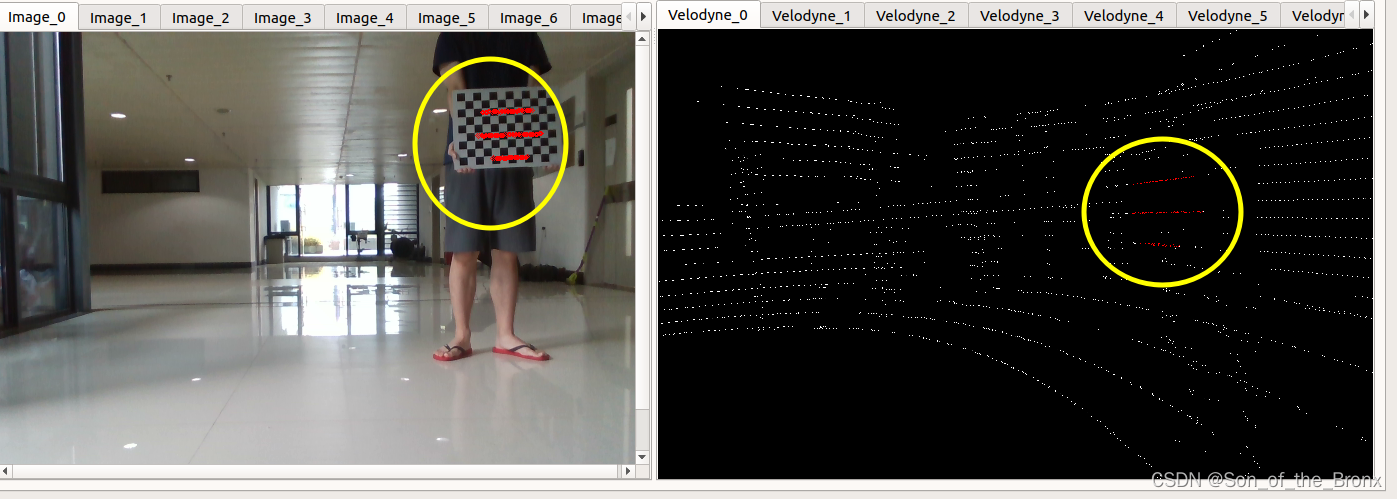
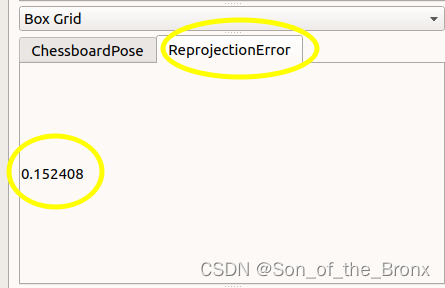
如果都投影到标定板上,就证明这个结果是合理的。也可以看重投影误差:(越小越好)
最后就是保存标定结果,点左上角的save,然后接下来的两个弹窗都选no,然后就可以得到.yaml后缀的文件,里面有相机雷达外参,和相机的内参。
总结
这个结果是一个粗标定的结果,因为重投影误差还是一般,应该也可以通过取更多的关键帧来计算,减小重投影误差获得更好的标定结果。
















 9362
9362

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









