




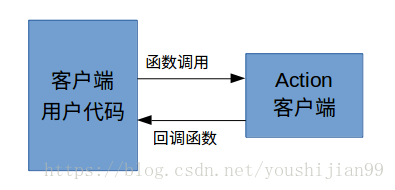
动作编程(action)
一种问答通信机制
带有连续反馈
可以在任务过程中止运行
基于ROS的消息机制实现
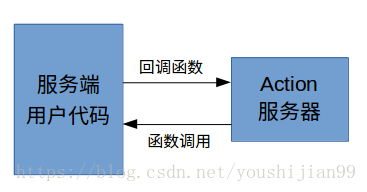
goal 发布任务目标
cancel 请求取消任务
status 通知客户端当前的状态
feedback 周期反馈任务运行的监控数据
result 向客户端发送任务的执行结果,只发布一次
 本文介绍了ROS kinetic中如何进行动作编程,包括定义自定义动作消息、编写动作服务器和客户端,以及如何处理任务的执行过程和反馈。通过示例展示了如何创建并运行动作服务器和客户端来实现通信。
本文介绍了ROS kinetic中如何进行动作编程,包括定义自定义动作消息、编写动作服务器和客户端,以及如何处理任务的执行过程和反馈。通过示例展示了如何创建并运行动作服务器和客户端来实现通信。
动作编程(action)
一种问答通信机制
带有连续反馈
可以在任务过程中止运行
基于ROS的消息机制实现
result 向客户端发送任务的执行结果,只发布一次
 1091
470
211
1091
470
211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























