






引言
随着技术不断地突破、市场需求的增加、社会变迁与政策支持协同驱动等因素的影响下,农业机器人的种类逐渐的增多。技术上,人工智能、多传感器融合与柔性机械设计的进步,使机器人能够适应复杂农业场景并完成除草、采摘等精细化任务;需求上,由于全球农业劳动力短缺与成本上升,农业工作逐渐使用自动化替代,同时高价值作物种植、垂直农业等新兴业态催生了定制化机器人需求;社会层面上,可持续发展压力推动精准作业以减少农药和资源浪费;政策与资本则通过国家战略扶持(如中国“十四五”智能农机规划)和风险投资加速研发与商业化落地。
目前世界上设施农业机器人可大致分为两种类型, 一是行走系农业机器人,可以在倾斜路面或者更复杂的如果园、植物工厂、水下等作业环境进行路径规划和避障,实现自主导航和完成巡检、加工搬运等功能,如巡检机器人、植保机器人、水下机器人;二是机械手系农业机器人,主要用于果蔬的采摘搬运,结合机器视觉图像处理识别果蔬的信息,对机械手臂的运动规划和力学特性要求较为严格,如授粉机器人、采摘机器人。
一、农业机器人当前应用方向
1)作物的微观监测
·在大型农田中进行人工监测尤为困难,也增加了更多与农业相关的不确认性要素。为了降低这种危险,通常使用农业机器人对作物进行微观监测。农业机器人对作物的微观监测,指通过高精度传感器、成像技术和人工智能算法,对植物的生理状态、细胞结构、病虫害早期迹象等微观特征进行实时、无损检测与分析。
·农业机器人的微观监测正从“宏观表型”向“细胞-分子级”深入,通过纳米传感器、AI显微诊断与多模态数据融合,实现对作物健康的“透视级”管理。
2)微型喷洒和除草
·农业机器人的微型喷洒与除草技术,通过高精度传感器、AI算法与微型化执行机构的结合,实现了对农田的“点对点”精准作业,大幅减少农药使用、降低环境污染并提升作业效率。
近年来,国内外很多学者针对变量喷雾控制系统展开了研究。Hirook、Tackenberg等在智能变喷雾领域取得重大突破.艾剑锋 、玄子玉等以单片机作为控制核心研发了喷雾量可随田间实际情况自动调节的变量喷雾控制系统。
3)无人机--传感器
·无人机与传感器的结合,正在彻底改变传统农业的作业模式。通过搭载多种高精度传感器,无人机能够实现对农田的立体化感知与精准管理,成为农业数据采集、分析与决策的“空中大脑”。土地测绘、农田害虫勘探和一般的作物检查等是无人机广泛应用的首要范畴。无人机--传感器系统的典型应用有作物健康诊断,精准植保,土壤与灌溉管理,灾害应急响应及畜牧监测。
·无人机与传感器的融合,正推动农业进入“细胞级监测、克级控制”的精准时代。通过多模态传感、空天地协同与AI实时决策,这一组合不仅将农药使用量降低50%、水资源利用率提升35%,更重构了农业生产的数据流与价值链。
4)采摘、分类和收割
·农业机器人在采摘分类与收割环节的应用,通过多模态感知、柔性执行与智能决策系统,实现了从田间到分选的全流程自动化,大幅提升效率、减少损耗并优化农产品品质。
·采摘主要流程为通过光谱分析和触觉反馈进行成熟度识别,然后通过仿生机械臂和动态路径规划实现精准采摘。目前典型应用案例有草莓采摘机器人和葡萄分类系统等。收割先进行产量预估,然后通过自适应割台和籽粒监测进行精准收割。
·通过农业机器人进行采摘分类和收割工作可以大大降低果蔬的损耗率,也提升了大田作物的收割效率。
5)栽培和播种
·农业机器人在栽培与播种环节的应用,通过精准感知、智能决策与自动化执行,实现了从土壤准备到种子入土的全程优化,显著提升资源利用效率、降低劳动强度并保障作物生长一致性。
·机器人能够精确的确认相关的土壤特征,根据土壤肥力、历史产量数据动态调整株距,精准地投放种子。
6)无人驾驶技能
·农业机器人的无人驾驶技能是其实现田间自主作业的核心能力,依赖多模态感知、智能决策与精度控制技术,在非结构化农田环境中完成导航、避障与任务执行
丁幼春等针对稻田播种机智能化问题,将北斗导航和电子罗盘信息融合,免疫 PID 控制器,实现直线路径跟踪,相较于传统PID 控制减小了稳态调节时间和最大跟踪偏差。
7)挤奶机器人等的应用
·挤奶机器人首先奶牛识别与个体化管理,确保奶牛的身体状况是否健康;然后进行乳头定位与清洁,确保其不被细菌感染;最后进行精准挤奶,确保获得的牛奶的量和质都是最佳的。
·挤奶机器人通过自动化感知、精准控制与数据驱动管理,彻底改变了传统人工挤奶模式,在提升效率的同时保障奶牛健康与乳品质量。
8)修建和切开作物
·农业机器人在作物修剪与切割领域的应用,通过多模态感知、自适应执行器与智能决策算法,实现了从果园整形到作物采收的精准作业,大幅提升效率、减少损伤并优化资源利用。
·农业机器人对作物进行修剪或切开,以促进它们的健康成长。例如果园整形修剪、茶树顶芽采摘、甘蔗收割、蔬菜加工分切、葡萄藤冬季修剪。无论是“修剪”还是“切开”作物,农业机器人都运用了高顶级的计算机视觉技能。不仅将修剪效率提升3-5倍、损伤率降低至5%以下,更通过智能决策优化作物生理响应。
9)机器人牧羊等
·机器人牧羊通过自主导航、群体行为分析与生态友好管理,将传统放牧升级为数据驱动的精准作业,显著提升羊群健康管理效率并减少对自然生态的干扰,将走失率从人工放牧的5-8%降至1%以下,草场利用率提升30%。
二、科研室中机器人功能
1. 键盘控制移动
1)功能描述:通过PC键盘(WASD)远程控制机器人底盘运动
·基础运动:前进、后退、左转、右转
·速度调节:多档位速度切换(低速精细操作/高速移动)
·安全保护:急停功能(一键停止所有电机)
2)硬件系统搭建
·控制单元:主控制器(如STM32)接收指令,解析后生成电机控制信号。
·执行机构:电机驱动模块(如L298N)将控制信号转换为电机转速和方向。
·底盘采用差速驱动结构(两主动轮+两万向轮)。
·通信模块:USB串口/蓝牙模块实现计算机与机器人的指令传输。
3)人机交互界面
·键盘控制端:支持可视化速度/方向状态显示(如进度条/箭头图标)。
·声音反馈:按键提示音、异常报警音。
·硬件状态监控 :实时显示电池电量、电机温度等关键参数。
2. 雷达测试
1)环境感知与障碍检测
·实时扫描:通过激光雷达(LiDAR)360°扫描周边环境,精准识别障碍物(如农机、树木、沟渠)与地形变化。
·距离测量:检测0.1米至20米范围内的物体,精度达±2厘米,确保机器人安全避障。
2)导航与路径规划支持
·地图构建:生成农田二维/三维点云地图,辅助机器人规划最优作业路径(如绕行不规则田埂)。
·动态定位:结合GPS与雷达数据,实时修正机器人位置(田间定位误差<5厘米)。
3)作物与地形分析
·植株密度监测:通过点云密度分析作物生长均匀性(如小麦田缺苗区域检测)。
·地表建模:识别垄沟高度、坡度变化,指导播种机自动调平。
3. Web浏览器显示摄像头
1)核心功能
·实时视频监控:通过浏览器远程查看机器人搭载摄像头的实时画面,支持多终端访问(电脑、手机、平板)。画面延迟≤300ms,满足田间作业动态监控需求。
·多视角切换:支持前后置摄像头切换(如前置用于导航避障,后置监控农机具作业状态)。可扩展红外/多光谱摄像头显示,用于夜间或作物健康监测。
·交互式操作:网页端控制摄像头角度(水平360°、俯仰±90°云台)。一键截图/录像功能,保存异常场景(如设备故障、作物病害)用于后续分析。
·自适应画质:根据网络带宽动态调整分辨率(720P/1080P/4K)与码率,保障弱网环境流畅性。
2)技术优势
·低代码集成:基于ROS与HTML5技术,兼容主流浏览器,无需安装插件。
·轻量化传输:采用H.265编码,同等画质下带宽占用降低50%。
·安全可控:支持HTTPS加密传输与用户权限分级(如仅允许管理员控制云台)。
3)应用场景
·远程巡检:在控制中心实时查看田间机器人作业状态(如播种深度、收割效果)。
·故障诊断:工程师通过画面远程指导现场人员维修(AR标注叠加指导)。
·精准农事:结合AI分析视频流,实时识别杂草、病虫害并标注显示。
·数据存档:录制关键作业阶段视频,用于产量评估与农事追溯。
4.开启风扇
·设备散热:防止主控芯片、电机驱动器过热。
·作业辅助:吹散作物表面露水/灰尘(例:采收前清洁果实)、模拟自然风辅助授粉。
·环境调节:温室通风(CO₂均衡)、驱虫(特定频率气流干扰昆虫活动)。
5. 车道线识别及控制小车沿车道线运动
基于车道线识别结果自主循迹 ,通过视觉技术引导机器人沿预设路线精准移动,实时识别地面车道线并计算偏离角度 ,适用于以下场景:
·大田作业:识别作物行(如玉米、小麦)确保播种、施肥沿直线行进。
·果园管理:沿果树行自动修剪、采摘,避免碰撞树干。
·温室巡检:识别地面引导线或栽培槽边缘,实现苗床间自主移动。
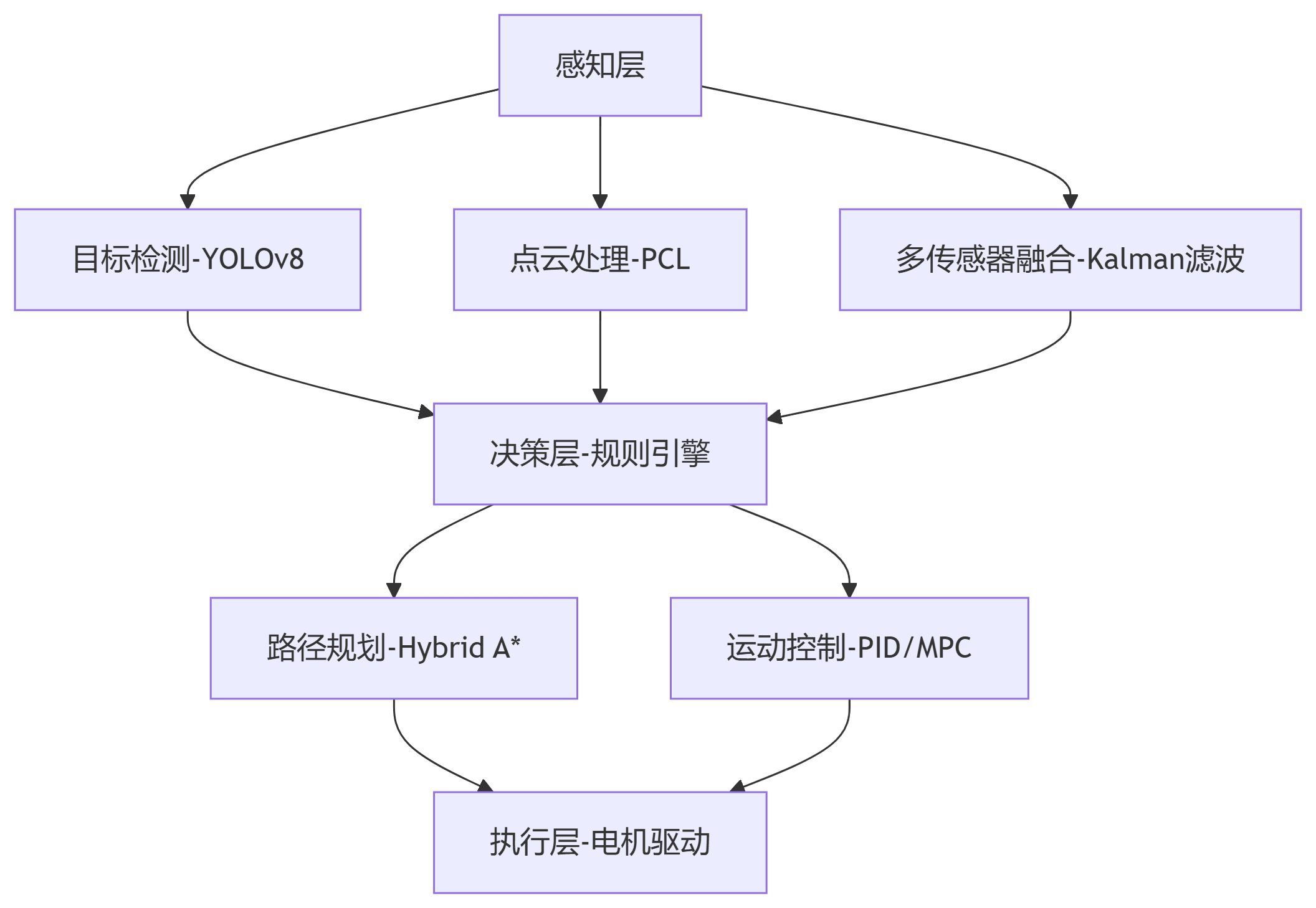
6. 基于YOLO目标检测进行决策控制
1)核心流程
·目标检测:摄像头或无人机实时视频流输入,实时检测行人、车辆、障碍物等目标 ,根据检测结果触发动作。针对农业场景优化(识别作物、杂草、农机具、动物等)对这些信息进行分析,以了解场景中目标的具体情况。最后输出目标类别、置信度、位置(边界框坐标)。
2)决策逻辑
·依据提取和分析得到的目标信息,结合预先设定的规则或策略来制定决策
·进行优先级排序,威胁目标(如障碍物)优先响应,生产目标(如作物)次之。
3)控制执行
根据制定好的决策,对相应的系统或设备发出控制指令,使其执行相应的动作。
·路径调整:避障、绕行或停车。
·触发作业:启动喷洒、采摘、施肥等模块。
7. 资源监视器
1)计算资源
·CPU利用率:实时显示各核心负载,预警阈值设定(如单核>90%持续10秒)
·GPU利用率:监控深度学习推理负载(YOLO模型占用显存、CUDA核心使用率)
·内存占用:检测内存泄漏(如ROS节点异常增长超过1GB/小时)
2)硬件状态监测
·温度监控:主控芯片(如Jetson AGX Orin)、电机驱动器温度(安全范围:-20℃~85℃)
·电源管理:电池电量(精度±3%)、充放电电流、预估剩余续航时间
·传感器健康:LiDAR点云密度、摄像头帧率异常检测
3)软件系统监测
·ROS节点状态:节点存活监测、话题通信频率(如/cmd_vel≥20Hz)
·进程优先级:关键进程(路径规划、避障)CPU调度保障
·算法优化评估:对比YOLOv5与YOLOv8在Jetson Orin上的资源消耗,识别高负载模块(,指导代码优化。
·能耗管理:生成田间作业能耗报告,优化任务调度策略。
8. 机械臂使用(智能灌溉Demo、智能授粉Demo )
1)智能灌溉Demo功能说明
·精准定位灌溉:通过机械臂将灌溉装置(喷头/滴管)精准移动至作物根部,减少水资源浪费。
·按需供水:根据土壤湿度传感器数据动态调整水量,实现变量灌溉。
·多作物适配:支持行栽作物(玉米、小麦)与点播作物(果树、蔬菜)的差异化灌溉策略。
2)智能授粉Demo功能说明
·仿生授粉:模拟蜜蜂振动采集与传递花粉的动作(适用于番茄、草莓等自花授粉作物)。
·精准识别:区分花朵开放状态(仅对盛开期花朵操作)。
·无损接触:柔性材料接触花蕊,机械损伤率<1%。
3)技术亮点
·节水效率:较传统漫灌节水40%-60%。
·夜间作业:红外摄像头+LED补光实现24小时工作。
·模块化设计:快速更换喷头适配大棚/露天地形。
·振动优化:频率自适应调节(不同作物需20-80Hz)。
·多花协同:单次路径规划覆盖整株花朵(如番茄穗状花序)。
·生物兼容:刷头材料通过食品安全认证(FDA硅胶标准)。
三、农业机器人功能实现步骤
1)需求分析与场景定义
·作业场景划分:大田(玉米/小麦播种收割)、果园(苹果/葡萄采摘)、温室(蔬菜育苗)、畜牧(挤奶/饲喂)。极端环境适配:沙漠灌溉机器人耐高温设计、高湿温室防锈处理。
·功能优先级排序
| 优先级 | 功能类型 | 示例场景 |
|---|---|---|
| P0 | 基础移动与避障 | 田间自主导航、紧急制动 |
| P1 | 核心作业功能 | 精准播种、果蔬采摘、变量施肥 |
| P2 | 数据监测与管理 | 土壤墒情分析、作物健康报告生成 |
| P3 | 扩展协同能力 | 多机协作、云端农事调度 |
2)硬件系统设计与集成
·传感器选型矩阵
| 功能需求 | 传感器类型 | 推荐型号 | 关键参数 |
|---|---|---|---|
| 环境感知 | 16线激光雷达 | RoboSense RS-LiDAR-16 | 探测距离150m,水平FOV 360° |
| 作物识别 | 多光谱相机 | MicaSense RedEdge-MX | 5波段(红边/近红外),分辨率1.2MP |
| 精细操作反馈 | 六维力传感器 | OnRobot HEX 6轴力控 | 力矩精度±0.1N·m,采样率1kHz |
·执行机构设计:
·移动底盘:四轮独立驱动+履带式(爬坡35°,载重200kg)
·作业模块:快换接口设计(3分钟切换播种器/喷药臂/采摘爪)
·能源系统:锂电+太阳能板双供电(72V 20Ah,续航8小时)
·计算单元架构:
·边缘计算:NVIDIA Jetson AGX Orin(32TOPS算力,运行ROS2)
·实时控制:STM32H7系列(EtherCAT总线,控制周期1ms)
3)软件开发与算法实现
1)核心算法
·关键代码模块:通信中间件、视觉处理、AI推理。
·典型功能实现流程(以智能除草为例)
多光谱图输入 →U-Net分割作物与杂草 →生成作业热力图 →
机械臂路径规划→激光除草(98%杂草灭杀率)→结果可视化
4)系统集成与测试验证
·实验室测试项
| 测试类别 | 具体内容 | 合格标准 |
|---|---|---|
| 功能单元测试 | 单个传感器精度校验 | LiDAR测距误差≤±2cm |
| 控制响应测试 | 急停指令响应时间 | 从检测到障碍到完全制动≤0.3s |
| 持续压力测试 | 72小时连续作业稳定性 | 内存泄漏<10MB/天,无宕机 |
·田间验证指标:导航精度、作业效率、环境适应性。
·典型问题解决方案:
GPS信号丢失:视觉-惯导融合定位(误差增长<0.1%/分钟)
机械臂震动:加入加速度前馈控制(振动幅度降低70%)
雨天误识别:多光谱数据加权融合(剔除雨滴噪声干扰)
5)部署优化与维护升级
·能效优化策略:
动态功耗管理:非作业时段关闭LiDAR,CPU降频运行(节能40%)
任务调度算法:蚁群算法规划最短作业路径(减少空驶里程30%)
·OTA远程升级:
差分升级包(平均300KB/次)
双分区固件备份(升级失败自动回滚)
参考文献
[1]赵静娟,郑怀国,董瑜,杨艳萍.全球农业机器人研发趋势预测及对我国的启示[J].中国农机化学报,2021,42(4):157-162
[2]王飞涛,樊春春,李兆东,张顺,夏萍.机器人在设施农业领域应用现状及发展趋势分析[J].中国农机化学报,2020,41(3):93_98,120
[3]ChrisLytridis,VassilisG.Kaburlasos,TheodorePachidis,MichalisManios,EleniVrochidou,Theofanis Kalampokas andStamatis ChatzistamatisAgronomy 2021, 11(9), 1818
[4]AndreaBotta,ParideCavallone,LorenzoBaglieri,GiovanniColucci,LuigiTagliavini andGiuseppe QuagliaAppl. Mech. 2022, 3(3), 830-854;
[5]SupravaChakraborty,DevarajElangovan,PadmaLakshmiGovindarajan,MohamedF.ELnaggar,Mohammed M. Alrashed andSalah KamelSustainability 2022, 14(15), 9156
[6]Sara Oleiro Araújo,Ricardo Silva Peres,José CochichoRamalho,FernandoLidon andJosé BarataAgronomy 2023, 13(12), 2976
[7]Design and test of sub⁃controlled variable spray system based on STM32 .Xu Ning, Hu Minying, Sang Yongying, Ai Qinghe, Cao Zekun
[8]Optimal path tracking control system for wide-span robot operation platform LI Rongxuan1,YAN Hongfeng1,2,LI Falian1,ZHAO Chuanbo3,LI Lu1,2,LIU Chengli2,DENG Yurong2

















 886
886

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









