







 超级会员免费看
超级会员免费看
伺服: 优化控制
无感: 状态观测 滑模控制 自抗扰控制(pi)
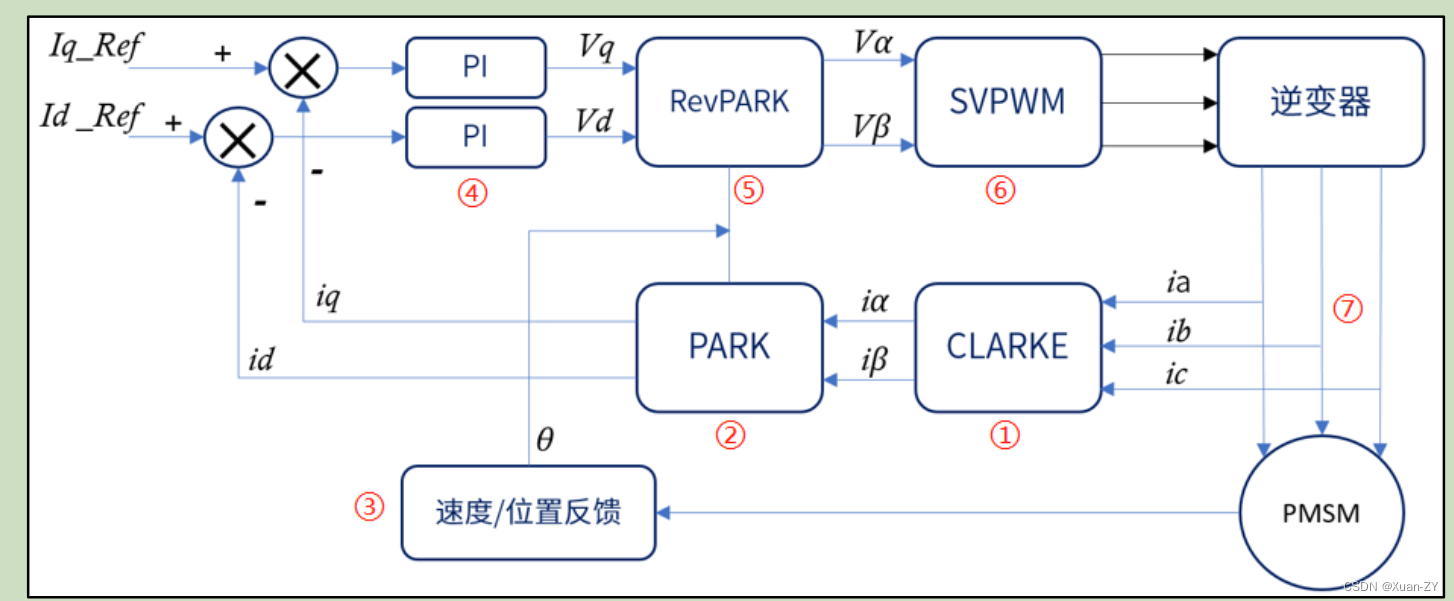
- 对电机三相电流进行采样得到: ia、 ib、 ic;
- 将 ia、 ib、 ic 经过 clarke 变换得到 iα、 iβ;
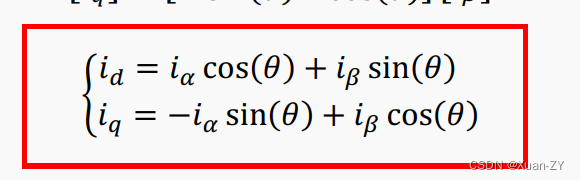
- 将 iα、 iβ 经过 park 变换得到 iq、 id;
- 计算 iq、 id 和其设定值 iq_Ref、 id_Ref 的误差;
- 将上述误差输入到两个 PID(只用到 PI)控制器,得到输出的控制电压 Vq、 Vd;
- 将 Vq、 Vd 进行反 park 变换得到 Vα、 Vβ;
- 将 Vα、 Vβ 输入 SVPWM 模块进行调制,合成电压空间矢量,输出该时刻三个半桥的开关状态进而控制电机旋转;
- 循环上述步骤。
三相电流到αβ(克拉克变换)

αβ到dq坐标系(park变换)

 订阅专栏 解锁全文
订阅专栏 解锁全文















 1641
1641











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









