







这里要注意,一个矩阵的特征向量可以生成这个矩阵空间。特征值为0,那么对应的特征向量就生成矩阵的零空间。
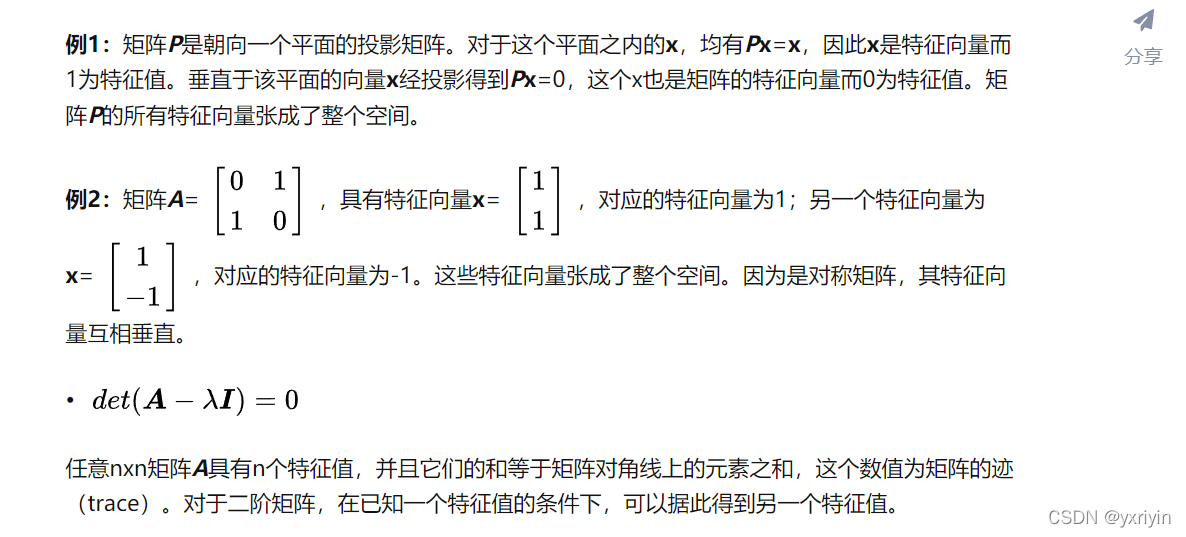
投影矩阵的特征向量可以生成整个空间。
对称矩阵的特征向量相互垂直。而特征值之和等于对角线上元素之和。
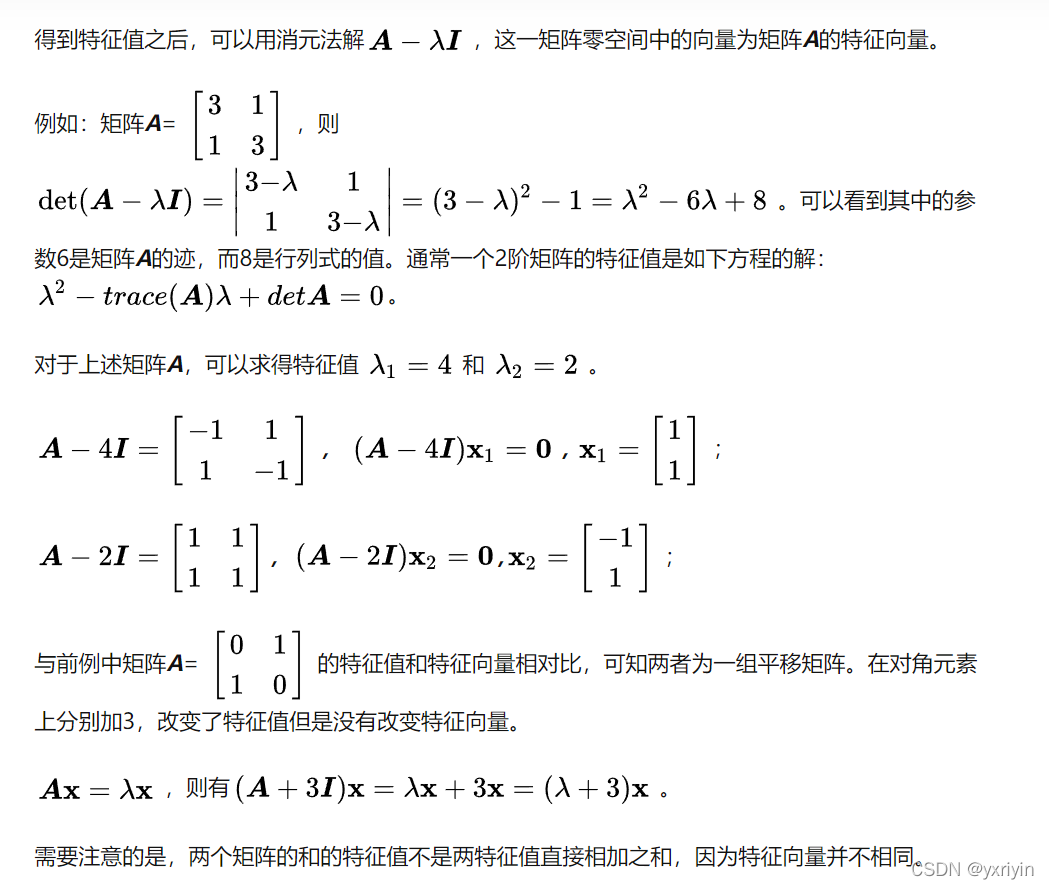
这里也很有意思,矩阵和单位矩阵进行相加操作,相当于平移,会改变特征值,但不改变特征向量。
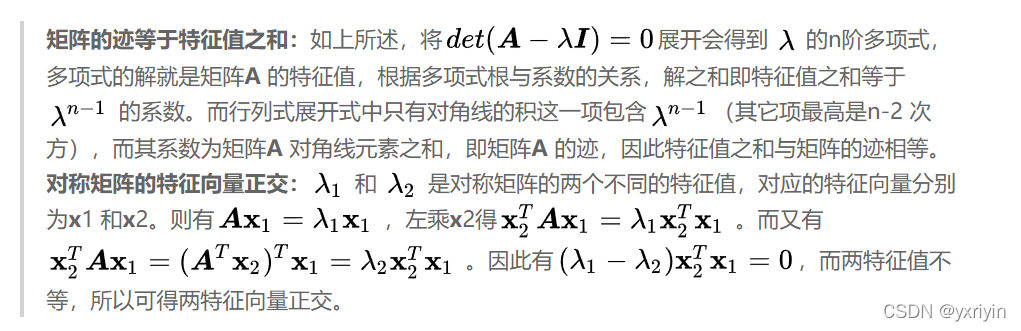
这个回答里有错误,只有实对称矩阵的特征向量才是正交基。这里面只有线性无关。
但不妨碍我们理解特征值和特征向量。对于任何一个空间,我们观察同一个向量会有不同的答案。
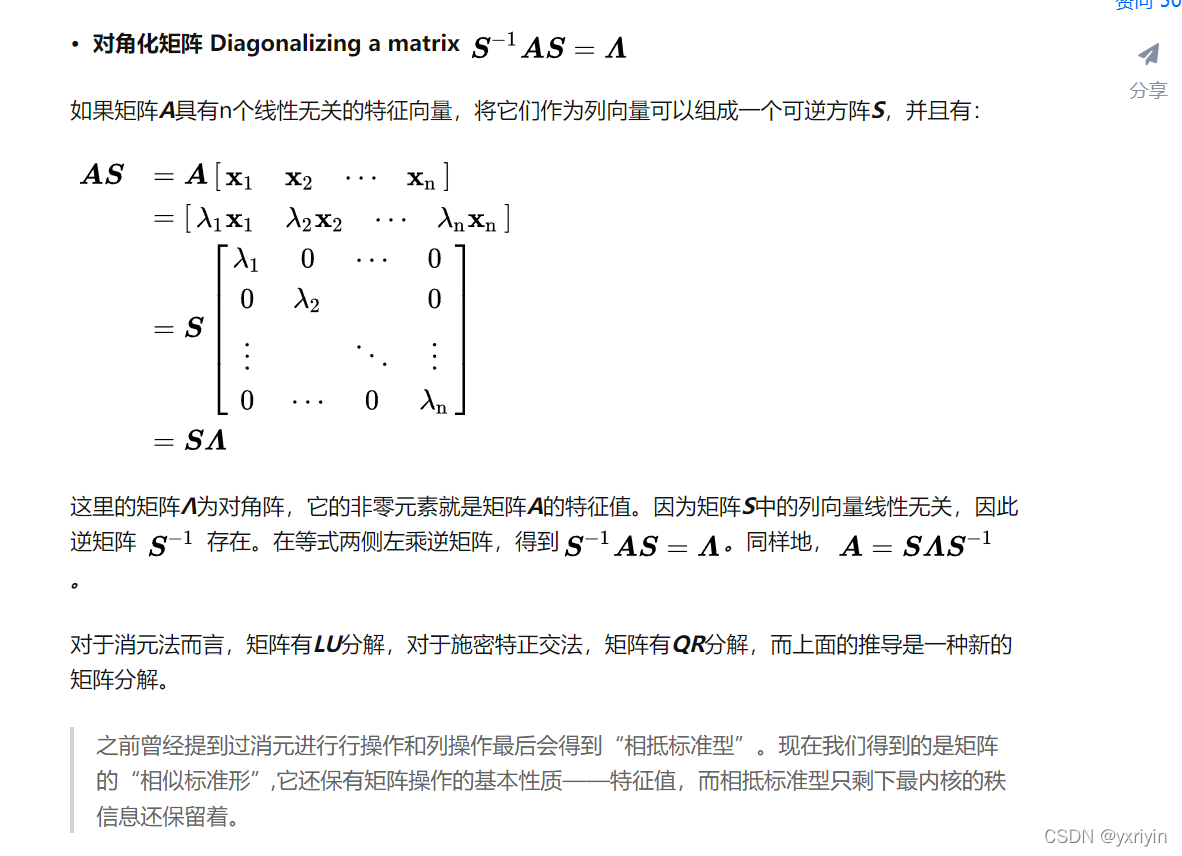
对于一个矩阵,他可以表示两个空间之间的一种关系,而特征值和特征向量则可以更加清晰的向我们展示这种关系,根据特征向量的定义,我们可以知道
所以,特征向量在这两个空间中,只有缩放,没有旋转。而从缩放的角度考虑,行列式代表的是
缩放的体积,而特征值,刚好就是缩放的比例。不过这里可能还需要理解,体积,似乎应该是垂直的情况下,但你从微分的角度来考虑,每一个微元,在任何方向上执行了一个缩放x,他的体积变化就是x。举个例子
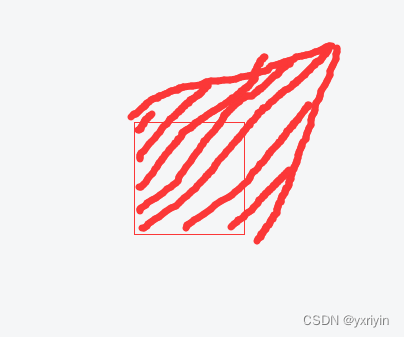
正方形边长为1,那么长缩放2,面积就是2倍,宽也同理。那么为什么对角线缩放也是2倍呢,
对角线是 * 2, 那么面积不是4么。但其实你要从对角线的方向思考问题,
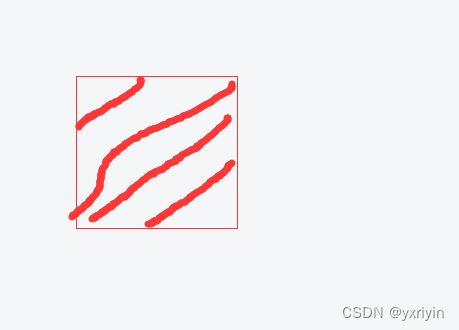
可以看到其实每一个斜边,都是被扩大了两倍,最终变成了一个菱形,而不是正方形了。
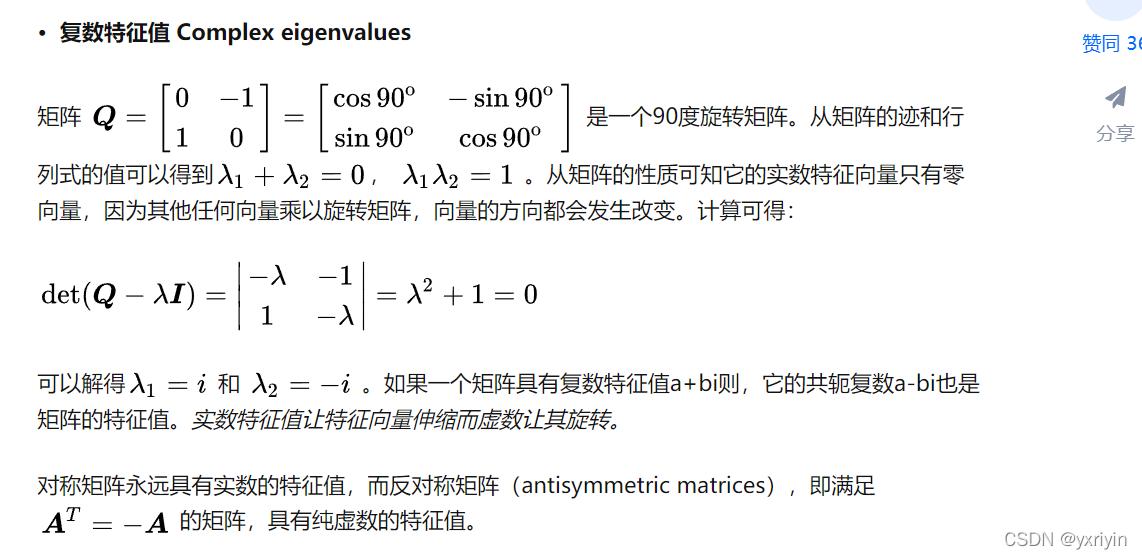
这里很有意思,对于旋转矩阵而言,是通过虚数特征值来进行旋转的。也就是虚数其实代表的是旋转。实数代表的是缩放。这个和我们学习四元数的思想是一致的。
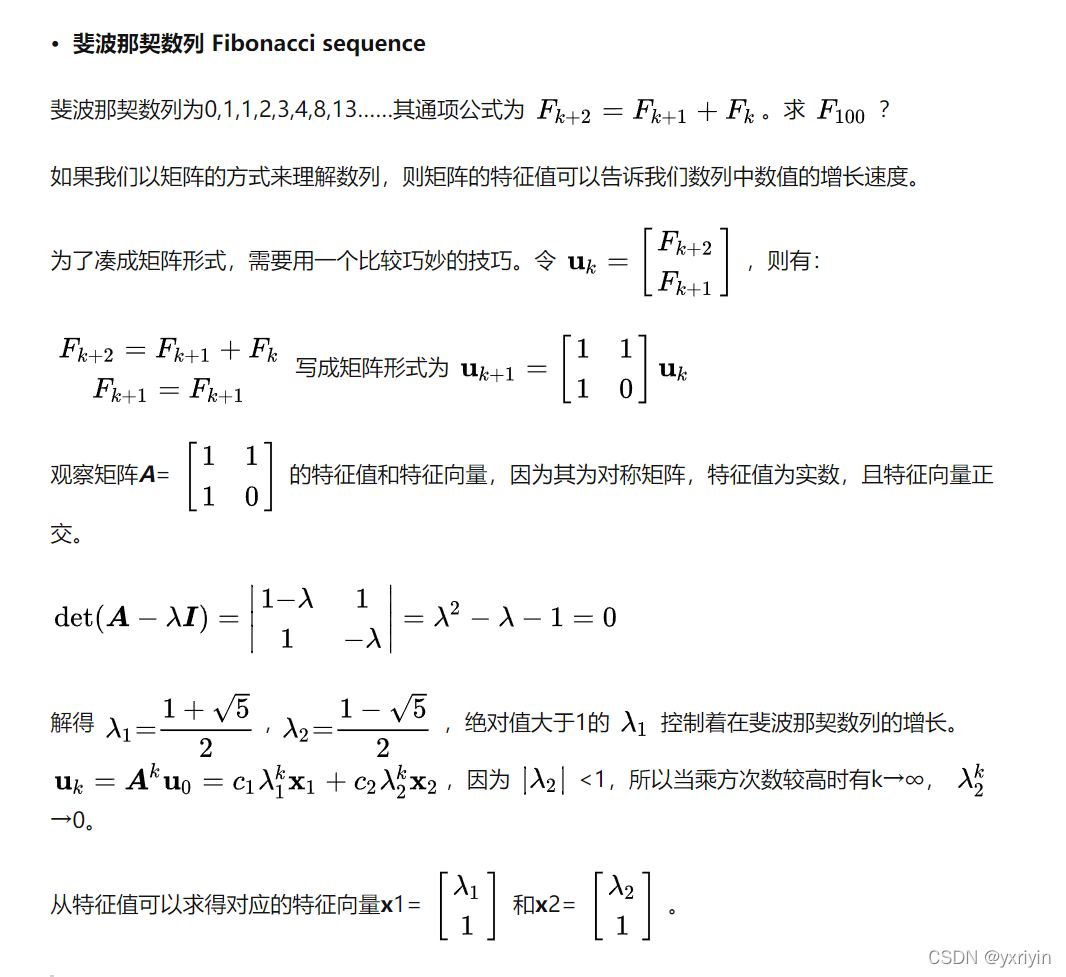
这里有个小技巧,因为原来是k+2 k+1 k三个项,需要通过把k+2 k+1合并,k+1 k合并,得到新的k+1和k的关系。
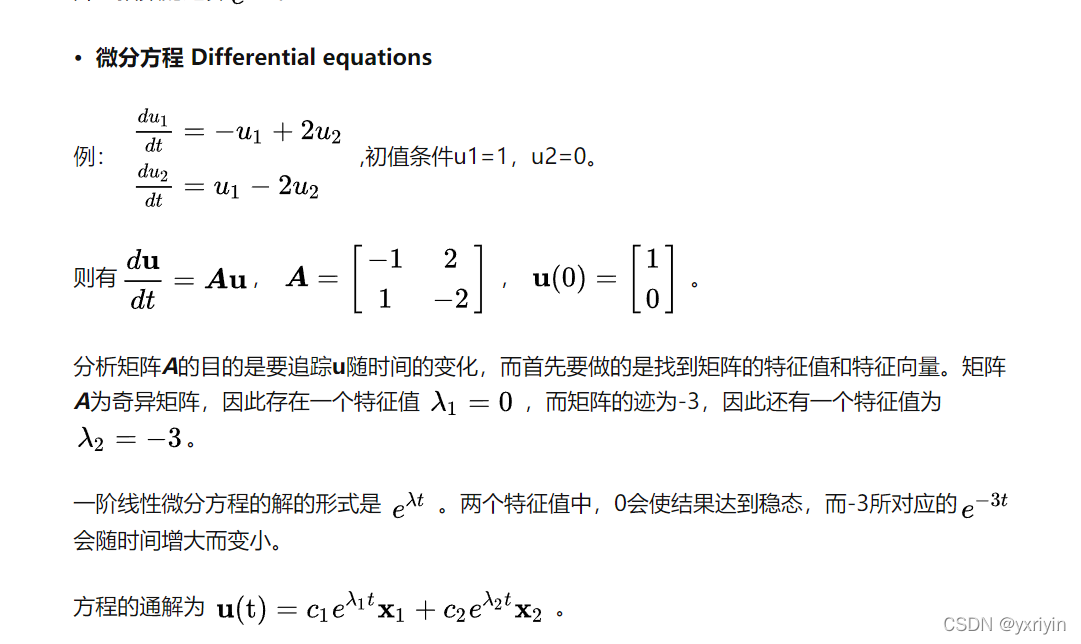
这里我们要理解微分方程到底是什么,因为存在特征值和特征向量,所以我们可以把微分方程理解成一个系统,他的系统可以用矩阵来表示,然后对于输入t,可以有对应时刻的输出。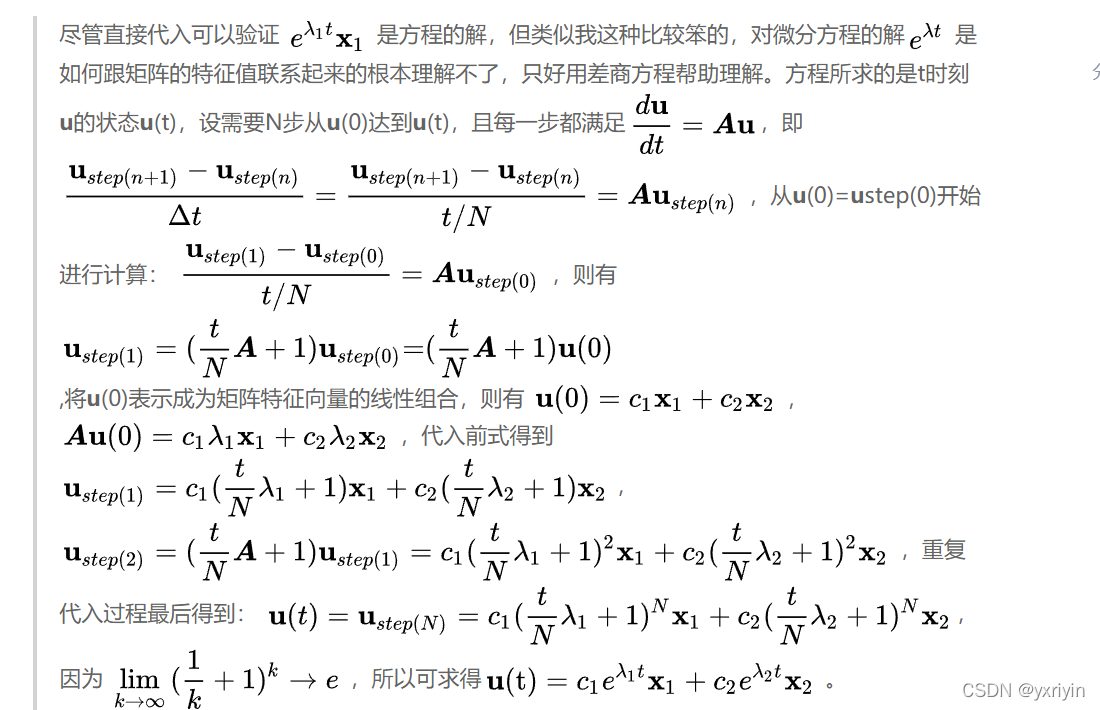
这一段的解释又回到了的证明的老套路。但要把解和e以及兰八达联系起来似乎也没有更好的办法。不过我们还是可以尝试去理解一下。首先我们知道的是uk和uk-1之间的关系,他们是通过一个矩阵A来联系的。如果从空间转化角度来说,那么就是把一个空间下的坐标变成另一个空间下的坐标。而这个矩阵就反映了全部的信息。
对于本来的一个坐标(x,y)经过一个矩阵转变后,会变成新的列空间的线性组合,那么相当于在列空间中的(x,y)在我们现在这个空间下的坐标值。那么这个矩阵的特征向量,也就是说,在列空间下的坐标(a,b),经过矩阵变换后,方向并没有发生变化。那么我们知道,(a,b)肯定是可以通过特征向量来线性组合的,特征向量张成了整个空间,而a,b的维数和张成的空间的维数相等。那么,对于特征向量来说,它应该是位于列空间中的。而(a,b)而是位于列空间的,不过有意思的在于,因为经过矩阵变换(a,b)并没有发生方向上的改变,(排除虚数的情况)。所以,我们似乎可以从这个迭代过程中提取出特征值。而e的存在则是因为du和u本身是线性关系。这种奇妙的关系往往会引出两个特殊极限,导出结果为e的一个情况。
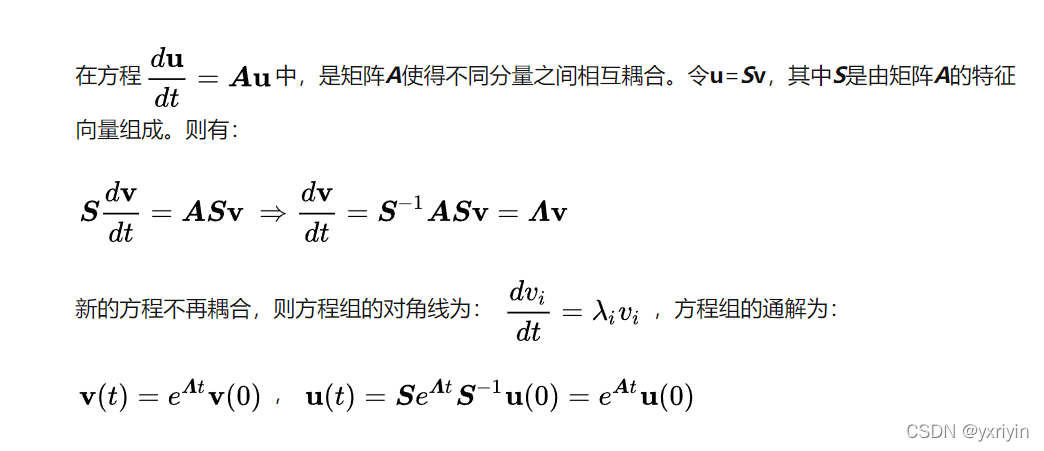
我们继续强化这个概念和印象。对于矩阵A,它的特征向量是存在于列空间中的,可以把一个列空间中的向量重新用特征向量的角度来线性组合,因为S是一个常数矩阵,和t无关。最终我们得到了dv/dt = 对角阵v,于是dv/dt=兰步达v,这样,我们就解耦了之前的情况。额这个情况足够简单,可以得到e。

最后这个对角阵指数,可以通过带入泰勒级数来获得这个结果。
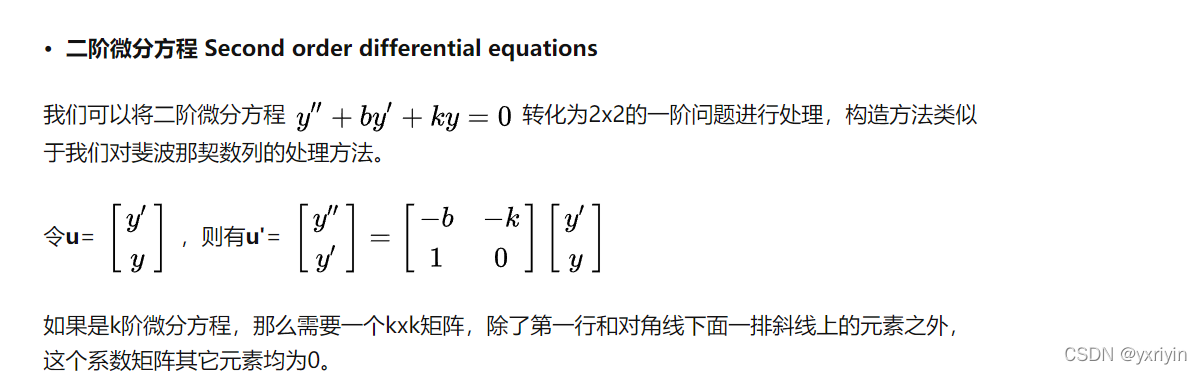
这里二阶微分方程用的是和斐波那契数列一样的方法,同样的,对于k阶微分方程,也是用kxk的矩阵来表示。
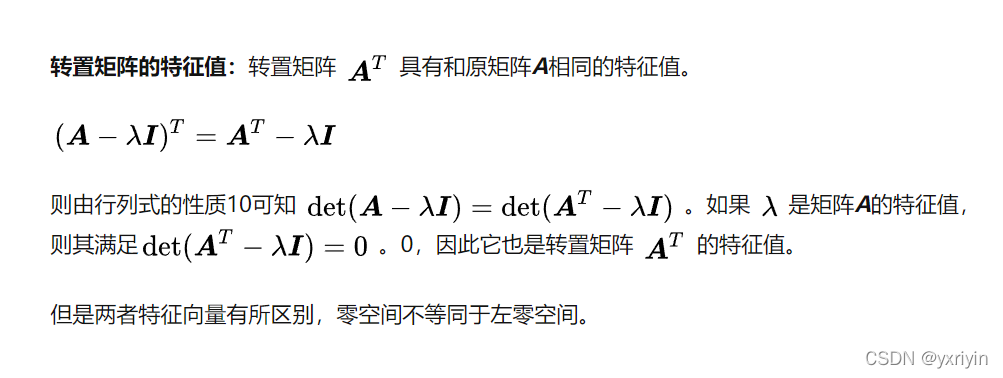
这里利用了求解矩阵特征值的方法。


















 1518
1518

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











