






鲁棒性,即系统的健壮性,是指在异常和危险情况下系统能够维持其功能和性能的能力。在控制系统中,鲁棒性表现为系统在参数摄动下维持某些性能的特性。例如,当控制系统面临输入错误、磁盘故障、网络过载或有意攻击等挑战时,其能否保持稳定并继续有效运行,就体现了其鲁棒性。
状态反馈和前馈是提升系统鲁棒性的两种重要手段。状态反馈是将系统的状态信息作为反馈信号,通过反馈回路来调整系统的控制输入,以达到期望的控制目标。而前馈则是将干扰或预测的未来状态信息提前加入到控制输入中,以抵消或减小干扰对系统输出的影响。
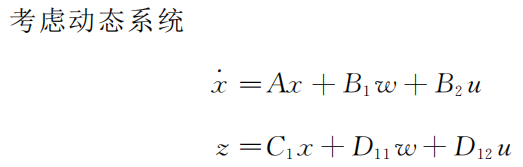
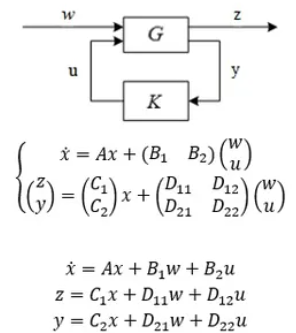
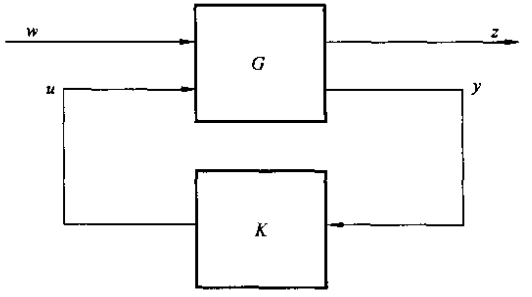
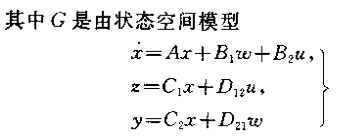
全 信 息(或 状 态 反 馈)H∞控制问题
考虑一个动力 学系统如下
:

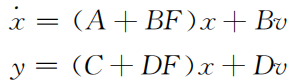
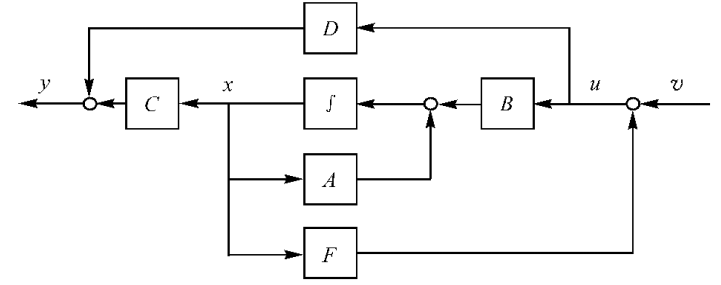
若存在状态反馈
u
=
Fx
使得系统稳定
,
即使得
A
+BF 为稳定矩阵
,
则称动态系统
或矩阵对
(
A
,
B
)
是可镇定的
如下方程描述的
MIMO
动态系统
闭环系统的方程为
% 定义系统参数
J = 1; % 假设的转动惯量,可以根据实际情况修改这个值
% 定义状态空间模型的矩阵
A = [0 1; 0 0];
B = [0 0; 1/J 0];
B_disturbance = [0 0; 0 -1/J]; % 外部干扰的输入矩阵
C = [1 0; 0 1]; % 输出矩阵,这里假设同时观测位置和速度
D = [0 0; 0 0]; % 直接传递矩阵,通常为零,因为没有直接传递项
% 创建状态空间模型
sys = ss(A, [B B_disturbance], C, D);
% 分割B矩阵为控制输入矩阵和扰动输入矩阵
B_u = B(:,1); % 控制输入矩阵
B_d = B(:,2); % 扰动输入矩阵
% 定义状态反馈矩阵K
% 这通常基于某些优化准则,例如极点配置或LQR设计
% 在这里,我们简单地选择一个反馈矩阵作为示例
K = [k1 k2]; % k1和k2是反馈系数,需要根据设计要求来选择它们
% 计算闭环系统的状态矩阵
A_closed = A - B_u*K;
% 创建闭环系统的状态空间模型(不考虑扰动)
sys_closed = ss(A_closed, B_u, C, D);
% 分析闭环系统
% 例如,绘制极点图
pole(sys_closed);
grid on;
title('Pole-Zero Map of the Closed-Loop System');
% 或者绘制Bode图
bode(sys_closed);
grid on;
title('Bode Plot of the Closed-Loop System'); 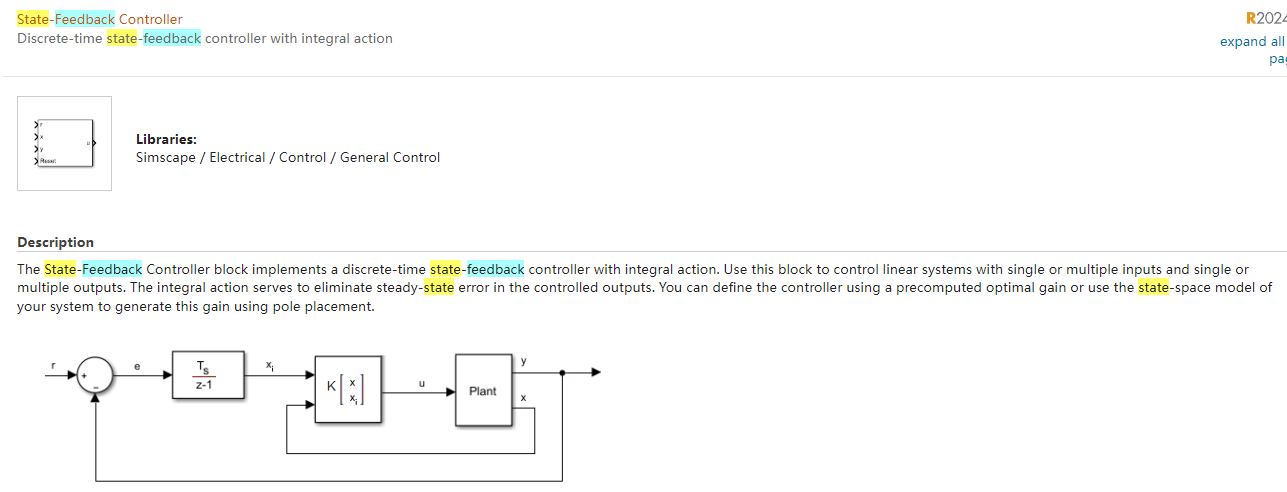
对比下输出反馈:
系统的H∞范数对应于bode图中幅值曲线的峰值,而系统的H2范数则对应于bode图中幅值曲线下方的面积。
H∞范数不超过一个上界,H2范数尽可能小,以保证系统对于不确定性具有鲁棒稳定性,并表现出更好的性能。
在状态反馈情况下,闭环系统的H∞性能并不能通过增加控制器的阶数来加以改进,因此,系统的H∞状态反馈控制器,总是能够选择一个静态控制律。

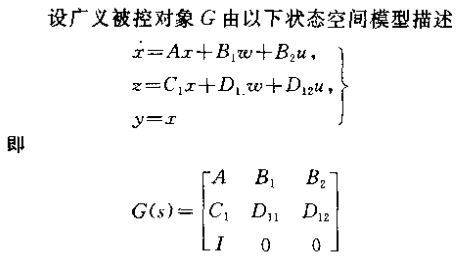
将其运用H∞的计算思路,通过矩阵A,B1,B2,C1等计算得到状态反馈矩阵K以此进行状态变量的控制作用!
 https://zhuanlan.zhihu.com/p/113223023
https://zhuanlan.zhihu.com/p/113223023 https://blog.csdn.net/qq_34551090/article/details/112754683
https://blog.csdn.net/qq_34551090/article/details/112754683

















 673
673

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









