







临床预测模型(Clinical prediction model)是什么?
临床预测模型,又可称“预后模型(prognostic models)”、“风险评分(risk scores)”或“预测规则(prediction rules)”,是医疗领域中用于估算特定医疗结果发生的概率的工具。它们通常基于统计分析或机器学习算法,通过分析一组患者的历史和临床数据来预测未来的健康状况或疾病的发展。这些模型帮助医生做出更加精确的诊断和治疗决策。
TRIPOD 声明是什么?
个体化预后或诊断的多变量预测模型的清晰报告(Transparent Reporting of a multivariable prediction model for Individual Prognosis Or Diagnosis)。
临床预测模型的核心包括
-
数据收集:搜集相关的临床数据,包括但不限于病史、生理指标、实验室检查结果等。
-
特征选择与处理:从大量数据中选择对预测目标有帮助的特征,并进行适当的处理。
-
模型构建:采用适当的统计或机器学习方法来构建预测模型。这些方法可能包括逻辑回归、决策树、随机森林、神经网络等。
-
模型验证:通过交叉验证、引入独立数据集等方式,检验模型的有效性和泛化能力。
-
临床实施:将验证后的模型应用于实际临床场景,辅助医生进行决策。
临床预测模型的不同分类
临床预测模型可以根据不同的标准进行分类,主要分类方法包括按照模型的目的、所使用的技术方法、以及输入数据的类型等。下面是一些常见的分类方式:
-
按模型目的分类 ● 诊断模型:用于评估患者是否患有特定疾病或病症。 ● 预后模型:预测疾病的发展趋势,如生存率、复发可能性或病情进展。 ● 治疗效果预测模型:预测患者对特定治疗的反应,帮助选择最合适的治疗方案。
-
按技术方法分类 ● 统计模型:使用传统的统计方法,如逻辑回归、线性回归、Cox 比例风险模型等。 ● 机器学习模型:利用更先进的算法,如决策树、随机森林、支持向量机(SVM)、神经网络等,能够处理更复杂或非线性的数据关系。
-
按技术方法分类 ● 单域数据模型:使用来自单一来源的数据,如仅使用临床数据或仅使用基因数据。 ● 多域数据模型:结合来自不同领域的数据,如临床数据、影像学数据、基因组数据等,以提高预测的准确性。
-
按时间维度分类 ● 静态模型:在一个时间点上使用患者的数据来进行预测。 ● 动态模型:利用随时间变化的数据来更新预测结果,更好地模拟疾病的发展过程。
临床预测模型的两大热点研究类型
诊断模型(Diagnostic models) 和 预后模型(Prognostic models) 是目前研究的两大重点。诊断模型通常被认为是横断面研究(Cross-sectional relationship), 是估计特定结果或疾病在某一时间点(即预测时刻 T0)存在或不存在个体中的概率。预后模型通常被认为是纵向研究(Longitudinal relationship),预测是关于个体是否会在特定时间段内经历特定事件或结果。

(该图片来源 PMID:25560730)
诊断模型与预后模型的异同点
主要相同之处:1、结局都是二分类的,比如诊断模型中是疾病存在与否,预后模型中是疾病发生与否。2、在多个预测因子的综合下给出发生相应事件的概率并推进临床决策。3、都会遇到一些问题:如何选择预测因子,模型构建策略,连续型因子处理以及过拟合风险。4、都需要检测模型的效能。 主要不同之处:1、指标选择需要考虑是否契合诊断/预后特点。2、诊断模型的结局通常是疾病存在与否,预后模型的结局通常是指某项事件的发生与否。3、诊断模型需要考虑参考标准和疾病的验证,预后模型需要对事件进行定义和检测。
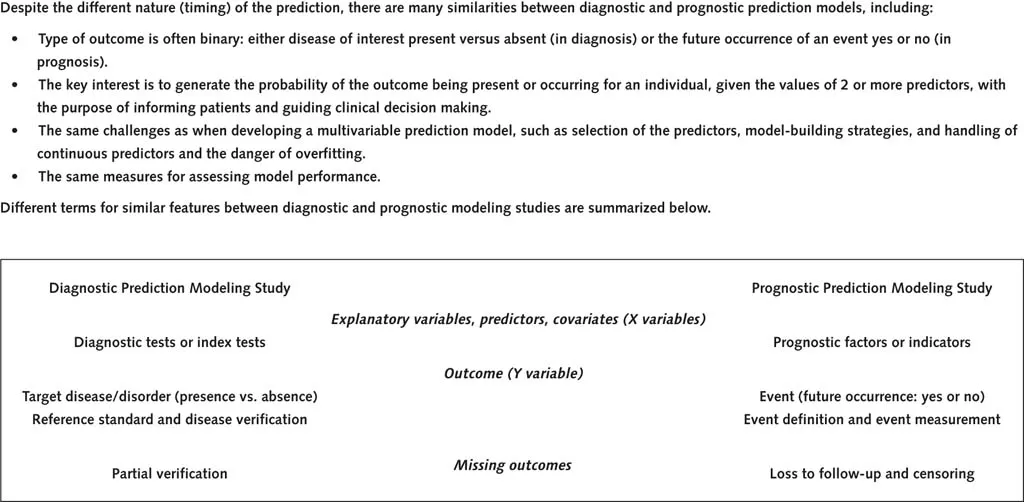
(该图片来源 PMID:25560730)
构建模型的方式
1a. 仅用一个数据集建立模型不验证; 1b. 同一数据集既建立模型又验证; 2a. 随机拆分数据集建立模型和验证; 2b. 非随机拆分数据集建立模型和验证; 3.建立模型后使用不同数据集验证; 4.使用已经发表的模型进行验证;

无论选择哪种模型,模型的构建与验证是核心中的核心。从目前的大多数研究来看,模型构建结束之后也必须增加验证。这种情况的出现也侧面反映了当下各类研究数据的“喷涌式产生”,同时也对研究者提出了更高的要求,需要研究者对研究问题有更深刻的认识,对数据的收集和分析有更高认知。目前可以进行建模的数据已不仅限于原本常用的生理病理指标(血液学/生化指标),现如影像学(基于 CT/MRI/超声/PT-CT)和病理学指标已经被各研究者们如火如荼的挖掘着。基于分子水平层面如基因组学,转录组学及蛋白组学的建模也正在不断地研究着。未来随着临床诊疗的进一步规范和精细化,测序技术的进一步提升,我想数据会源源不断地产生,那么各种有价值临床预测模型也会随着发展而不断产生。
参考文献:
-
Transparent Reporting of a multivariable prediction model for Individual Prognosis or Diagnosis (TRIPOD): explanation and elaboration. Ann Intern Med. 2015 Jan 6;162(1):W1-73. doi: 10.7326/M14-0698 IF: 39.2 Q1 B1.
注:若对内容有疑惑或者发现有明确错误的,请联系后台(希望多多交流)。更多内容可见公众号:生信方舟。














 3579
3579











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









