







三角测量(triangulation), 就是在不同的姿态下观察同一个对象,根据图像上的同名点的像素坐标,计算对象的三维坐标。
在双目视觉中,分左右相机,同时可以获得左视图和右视图,根据匹配的同名点和左右相机的投影矩阵,就可以计算出匹配同名点的世界坐标。
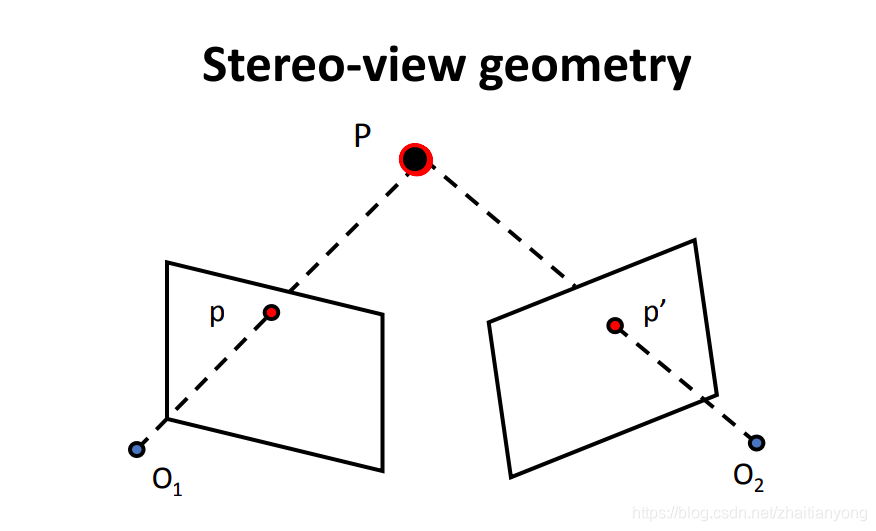
如图: O1和O2相机的投影的像素点为p, p’;P为世界坐标点的齐次坐标。
首先对两个相机进行标定,并获得投影矩阵分别是T1 和 T2, T1和T2的大小为3x4的矩阵。
p
=
[
u
v
1
]
p
′
=
[
u
′
v
′
1
]
p = \left[\begin{matrix} u \\ v \\ 1 \end{matrix}\right] p^{'} = \left[\begin{matrix} u ^{'}\\ v ^{'}\\ 1 \end{matrix}\right]
p=⎣⎡uv1⎦⎤p′=⎣⎡u′v′1⎦⎤
根据:
s 1 p = T 1 P s 2 p ′ = T 2 P s_1p = T_1P \\ s_2p'=T_2P s1p=T1Ps2p′=T2P
s1和s2 为尺度。 把T1分解成行向量T11、T12、T13。
s
1
[
u
v
1
]
=
[
T
11
T
12
T
13
]
P
s_1\left[\begin{matrix} u \\ v \\ 1 \end{matrix}\right] = \left[\begin{matrix} T_{11} \\ T_{12} \\ T_{13} \end{matrix}\right]P
s1⎣⎡uv1⎦⎤=⎣⎡T11T12T13⎦⎤P
分解
s
1
v
=
T
11
P
s
1
u
=
T
12
P
s
1
=
T
13
P
s_1v=T_{11}P \\ s_1u = T_{12}P \\ s_1 = T_{13}P \\
s1v=T11Ps1u=T12Ps1=T13P
把第三式带入,消去
s
1
s_1
s1
v
T
13
P
=
T
11
P
u
T
13
P
=
T
12
P
=
>
(
v
T
13
−
T
11
)
P
=
0
(
u
T
13
−
T
12
)
P
=
0
vT_{13}P=T_{11}P \\ u T_{13}P= T_{12}P \\ =>\\ (vT_{13}- T_{11})P=0 \\ (uT_{13}-T_{12})P=0\\
vT13P=T11PuT13P=T12P=>(vT13−T11)P=0(uT13−T12)P=0
可以看出,一对点可以有4个方程,P有3个未知数。可以把等式写成AP=0形式。
即:
[
v
T
13
−
T
11
u
T
13
−
T
12
v
′
T
23
−
T
21
u
′
T
23
−
T
22
]
P
=
0
\left[\begin{matrix} vT_{13}- T_{11} \\ uT_{13}-T_{12}\\ v^{'}T_{23}- T_{21} \\ u^{'}T_{23}-T_{22} \end{matrix}\right]P=0
⎣⎢⎢⎡vT13−T11uT13−T12v′T23−T21u′T23−T22⎦⎥⎥⎤P=0
然后对A进行SVD分解,最小二乘法就可以计算出P。
代码实现:
/**
*
* @param T1 相机O1的投影矩阵
* @param T2 相机O2的投影矩阵
* @param p1 相机O1的图像的像素点
* @param p2 相机O2的图像的像素点
* @param out 输出的三维坐标
*/
void triangulatePoint(Matrix<double, 3, 4>& T1, Matrix<double, 3, 4>& T2, Vector2d& p1, Vector2d&p2, Vector3d& out){
// 构建Ax = 0;
Matrix<double, 4, 4> A;
A.row(0) = p1(0)*T1.row(2) - T1.row(0);
A.row(1) = p1(1)*T1.row(2) - T1.row(1);
A.row(2) = p2(0)*T2.row(2) - T2.row(0);
A.row(3) = p2(1)*T2.row(2) - T2.row(1);
// SVD 分解
Eigen::JacobiSVD<MatrixXd> solver(A, Eigen::ComputeFullU|Eigen::ComputeThinV);
MatrixXd V = solver.matrixV();
VectorXd X = V.rightCols(1);
out[0] = X(0)/X(3);
out[1] = X(1)/X(3);
out[2] = X(2)/X(3);
}
OpenCV库,也已经实现了cv::triangulatePoints
这里也对其进行调用
void triangulateByOpenCV(Matrix<double, 3, 4>& T1, Matrix<double, 3, 4>& T2, Vector2d& p1, Vector2d&p2, Vector3d& out){
Mat T_mat1, T_mat2;
cv::eigen2cv(T1, T_mat1);
cv::eigen2cv(T2, T_mat2);
std::vector<Point2d> p1s,p2s;
p1s.push_back(Point2d(p1.x(), p1.y()));
p2s.push_back(Point2d(p2.x(), p2.y()));
/*
* @param projMatr1 3x4 projection matrix of the first camera.
@param projMatr2 3x4 projection matrix of the second camera.
@param projPoints1 2xN array of feature points in the first image. In case of c++ version it can
be also a vector of feature points or two-channel matrix of size 1xN or Nx1.
@param projPoints2 2xN array of corresponding points in the second image. In case of c++ version
it can be also a vector of feature points or two-channel matrix of size 1xN or Nx1.
@param points4D 4xN array of reconstructed points in homogeneous coordinates.
*
*/
Mat pts_4d;
cv::triangulatePoints(T_mat1, T_mat2, p1s, p2s, pts_4d);
Mat X = pts_4d.col(0);
X /=X.at<double>(3,0);
out[0] = X.at<double>(0, 0);
out[1] = X.at<double>(1, 0);
out[2] = X.at<double>(2, 0);
}
对两个函数进行测试,数据来自网络。
int main(){
Matrix<double, 3, 4> T1, T2;
T1(0, 0) = 0.919653; T1(0, 1)=-0.000621866; T1(0, 2)= -0.00124006; T1(0, 3) = 0.00255933;
T1(1, 0) = 0.000609954; T1(1, 1)=0.919607 ; T1(1, 2)= -0.00957316; T1(1, 3) = 0.0540753;
T1(2, 0) = 0.00135482; T1(2, 1) =0.0104087 ; T1(2, 2)= 0.999949; T1(2, 3) = -0.127624;
T2(0, 0) = 0.920039; T2(0, 1)=-0.0117214; T2(0, 2) = 0.0144298; T2(0, 3) = 0.0749395;
T2(1, 0) = 0.0118301; T2(1, 1)=0.920129 ; T2(1, 2) = -0.00678373; T2(1, 3) = 0.862711;
T2(2, 0) = -0.0155846; T2(2, 1) =0.00757181; T2(2, 2) = 0.999854 ; T2(2, 3) = -0.0887441;
Vector2d p1, p2;
p1(0) = 0.289986; p1(1) = -0.0355493;
p2(0) = 0.316154; p2(1) = 0.0898488;
Vector3d out1, out2;
triangulatePoint(T1, T2, p1, p2, out1);
triangulateByOpenCV(T1, T2, p1, p2, out2);
std::cout<< "result 1 >> " << out1.transpose() << std::endl;
std::cout<< "result 2 >> " << out2.transpose() << std::endl;
return 0;
}
两个函数输出的结果一致:
result 1 >> 2.14598 -0.250569 6.92321
result 2 >> 2.14598 -0.250569 6.92321
参考:
http://users.cecs.anu.edu.au/~hartley/Papers/triangulation/triangulation.pdf
http://vision.stanford.edu/teaching/cs231a_autumn1112/lecture/lecture10_multi_view_cs231a_old.pdf

















 4344
4344

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









