






【ur5机械臂末端添加robotiq85夹爪】
分别给出以下场景的实现过程:
二、实现gazebo中ur5与robotiq85的连接和控制【本文】
二、实现gazebo中ur5与robotiq85的连接和控制
(一)功能包下载
Robotiq2f85 gripper有被动关节(Mimic Joint),标准Gazebo不支持Mimic关节仿真, 所以需要安装一个插件。在一、实现rviz中ur5与robotiq85的连接和控制的基础上,下载plugins,然后catkin_make编译。
cd ~/catkin_ws/src
git clone https://github.com/roboticsgroup/roboticsgroup_gazebo_plugins
catkin_make(二)修改launch文件
gazebo的启动文件为fmauch_universal_robot/ur_gazebo/launch/ur5_bringup.launch。如一、中提到的,launch文件主要实现:加载参数、启动节点,下面一步步修改。
1. <!--Robot description and related parameter files -->加载模型参数
我们需要修改的模型文件为:load_ur5.launch.xml—>load_ur.launch.xml—>ur_gazebo/urdf/ur.xacro。
添加以下两处代码。
<!--继承robotiq_arg2f_85宏-->
<xacro:include filename="$(find robotiq_2f_85_gripper_gazebo)/urdf/robotiq_arg2f_85_macro.xacro"/><!--定义fixed关节,将robotiq_arg2f_base_link连接到机械臂末端的tool0-->
<joint name="ur_robotiq_joint" type="fixed">
<parent link="tool0"/>
<child link="robotiq_arg2f_base_link"/>
<origin xyz="0 0 0" rpy="0 0 0"/>
</joint>
<!--调用robotiq_arg2f_85,加入夹爪的link和joint-->
<xacro:robotiq_arg2f_85_gazebo
prefix=""
transmission_hw_interface="$(arg transmission_hw_interface)"
/>打开robotiq_2f_85_gripper_gazebo/urdf/robotiq_arg2f_85_macro.xacro,修改以下两处。
将插件名字改为“libroboticsgroup_gazebo_mimic_joint_plugin.so”;
<plugin filename="libroboticsgroup_gazebo_mimic_joint_plugin.so" name="${prefix}mimic_robotiq_85_1">
<plugin filename="libroboticsgroup_gazebo_mimic_joint_plugin.so" name="${prefix}mimic_robotiq_85_2">
<plugin filename="libroboticsgroup_gazebo_mimic_joint_plugin.so" name="${prefix}mimic_robotiq_85_3">
<plugin filename="libroboticsgroup_gazebo_mimic_joint_plugin.so" name="${prefix}mimic_robotiq_85_4">
<plugin filename="libroboticsgroup_gazebo_mimic_joint_plugin.so" name="${prefix}mimic_robotiq_85_5">将100行左右这段代码注释掉。因为在fmauch_universal_robot/ur_gazebo/urdf/ur_macro.xacro中已经添加了这个插件,不再重复添加。
<!--
Inject Gazebo ROS Control plugin, which allows us to use ros_control
controllers to control the virtual robot hw.
-->
<!--<gazebo>-->
<!--<plugin name="ros_control" filename="libgazebo_ros_control.so">-->
<!--</plugin>-->
<!--</gazebo>-->2. <!-- Controller configuration -->加载控制器参数
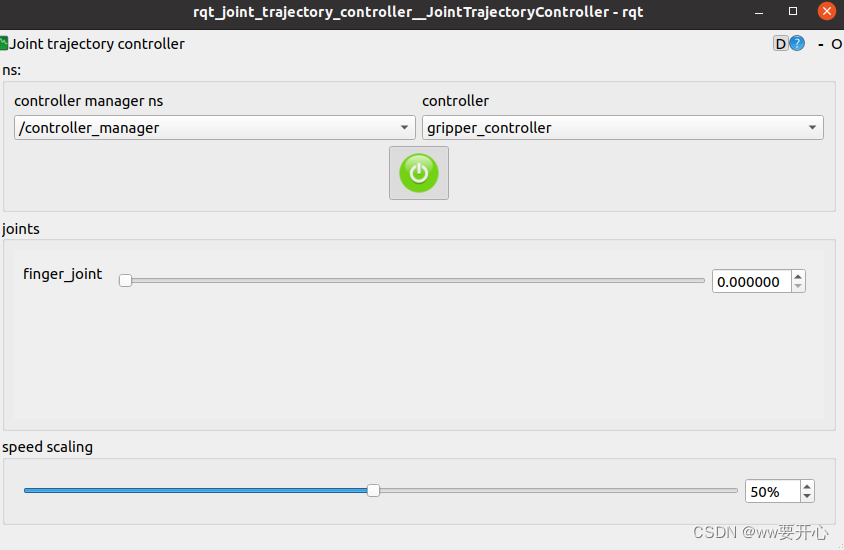
修改ur_gazebo/config/ur5_controllers.yaml。打开robotiq_2f_85_gripper_gazebo/config/robotiq_2f_85_gripper_controllers.yaml,修改gripper_controller的类型和关节。
type: position_controllers/JointTrajectoryController
joints:
- finger_joint 将gripper_controller添加到ur5_controllers.yaml。
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: &loop_hz 125
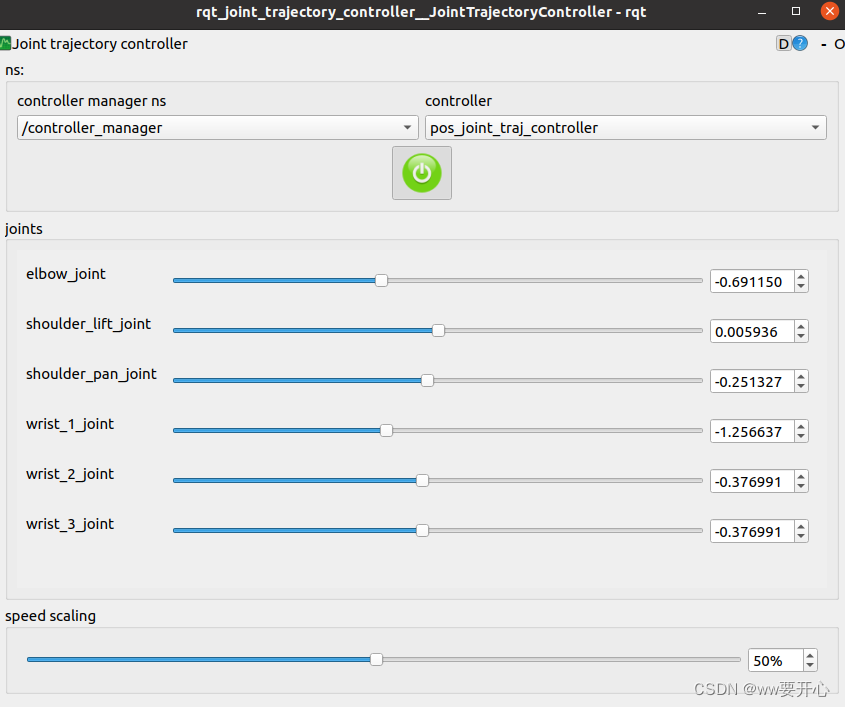
pos_joint_traj_controller:
type: position_controllers/JointTrajectoryController
joints: &robot_joints
- shoulder_pan_joint
- shoulder_lift_joint
- elbow_joint
- wrist_1_joint
- wrist_2_joint
- wrist_3_joint
constraints:
goal_time: 0.6
stopped_velocity_tolerance: 0.05
shoulder_pan_joint: {trajectory: 0.1, goal: 0.1}
shoulder_lift_joint: {trajectory: 0.1, goal: 0.1}
elbow_joint: {trajectory: 0.1, goal: 0.1}
wrist_1_joint: {trajectory: 0.1, goal: 0.1}
wrist_2_joint: {trajectory: 0.1, goal: 0.1}
wrist_3_joint: {trajectory: 0.1, goal: 0.1}
stop_trajectory_duration: 0.5
state_publish_rate: *loop_hz
action_monitor_rate: 10
gripper_controller:
type: position_controllers/JointTrajectoryController
gains:
finger_joint: {p: 10, d: 0.1, i: 1, i_clamp: 1}
joints:
- finger_joint
action_monitor_rate: 20
goal_tolerance: 0.002
max_effort: 100
stall_velocity_threshold: 0.001
stall_timeout: 1.0
joint_group_pos_controller:
type: position_controllers/JointGroupPositionController
joints: *robot_joints
ur5_bringup.launch中修改controllers参数值,启动三个控制器:关节状态发布、机械臂关节控制、夹爪关节控制。
<arg name="controllers" default="joint_state_controller pos_joint_traj_controller gripper_controller" doc="Controllers that are activated by default."/>在robotiq_2f_85_gripper_visualization/config文件夹新建gazebo_controller.yaml。
# Note: You MUST load these PID parameters for all joints that are using the
# PositionJointInterface, otherwise the arm + gripper will act like a giant
# parachute, counteracting gravity, and causing some of the wheels to lose
# contact with the ground, so the robot won't be able to properly navigate. See
# https://github.com/ros-simulation/gazebo_ros_pkgs/issues/612
ros_control:
pid_gains:
# these gains are used by the gazebo_ros_control plugin
finger_joint:
p: 20.0
i: 0.1
d: 0.0
i_clamp: 0.2
antiwindup: false
publish_state: true
# the following gains are used by the gazebo_mimic_joint plugin
left_inner_knuckle_joint:
p: 20.0
i: 0.1
d: 0.0
i_clamp: 0.2
antiwindup: false
publish_state: true
left_inner_finger_joint:
p: 20.0
i: 0.1
d: 0.0
i_clamp: 0.2
antiwindup: false
publish_state: true
right_outer_knuckle_joint:
p: 20.0
i: 0.1
d: 0.0
i_clamp: 0.2
antiwindup: false
publish_state: true
right_inner_knuckle_joint:
p: 20.0
i: 0.1
d: 0.0
i_clamp: 0.2
antiwindup: false
publish_state: true
right_inner_finger_joint:
p: 20.0
i: 0.1
d: 0.0
i_clamp: 0.2
antiwindup: false
publish_state: true
ur5_bringup.launch中加载夹爪的pid参数,如果不添加这一步,仿真环境中夹爪会一直抖动。
<rosparam file="$(find robotiq_2f_85_gripper_gazebo)/config/gazebo_controller.yaml" command="load" />3. 启动节点
添加控制节点
<node name="gui_controller" pkg="rqt_joint_trajectory_controller" type="rqt_joint_trajectory_controller" />使用rqt_joint_trajectory_controller自带的gui_controller控制机械臂关节。
(三)启动
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
roslaunch ur_gazebo ur5_bringup.launch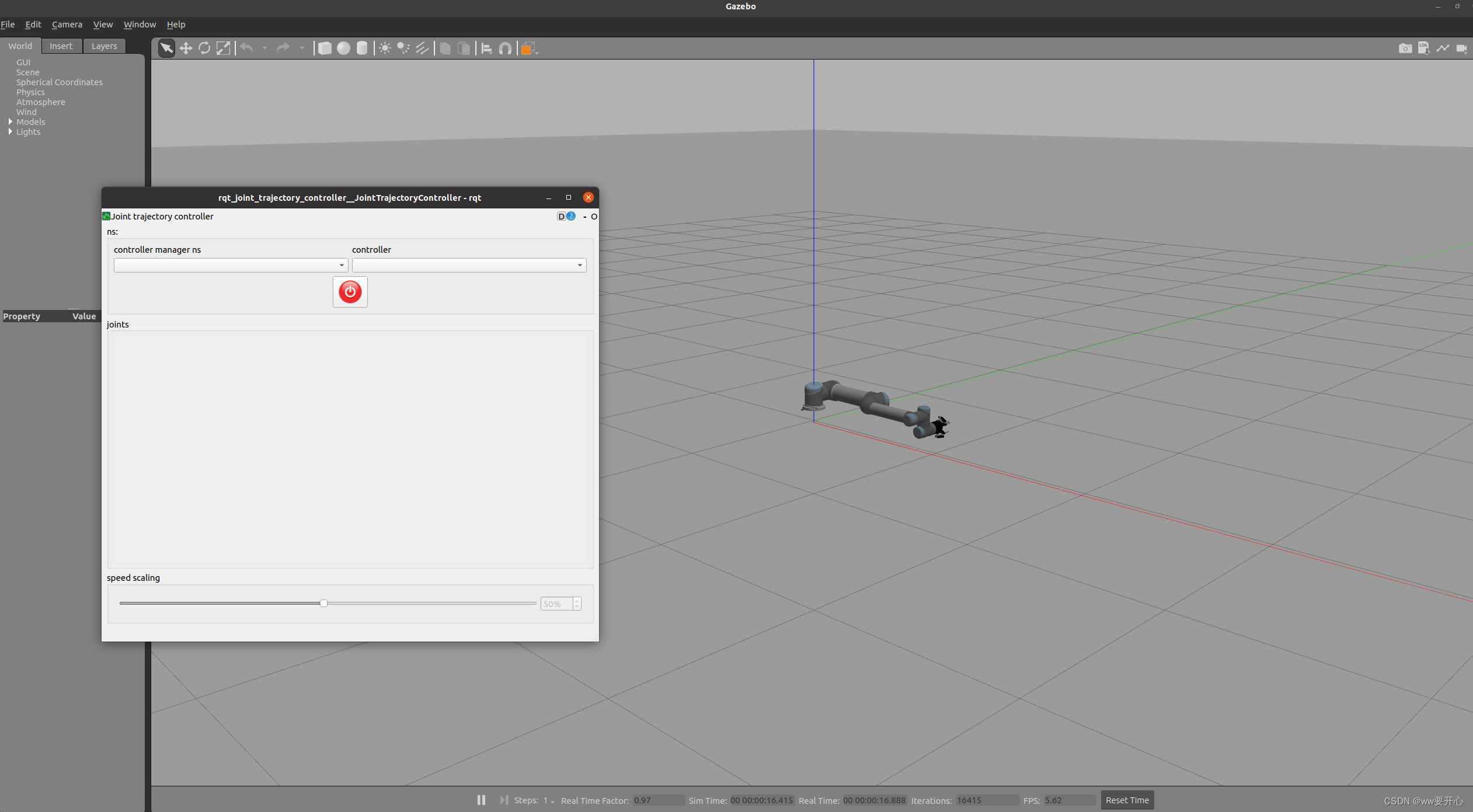
『相关学习资源』
ros_control和controllers学习:ROS学习笔记10 —— ros_control和controller的使用-CSDN博客















 7622
7622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









