



【ur5+robotiq85+YOLOv5视觉引导抓取和放置乐高积木块】
项目github地址:
https://github.com/pietrolechthaler/UR5-Pick-and-Place-Simulation
参考链接:踩坑记录:ubuntu20.04+ROS noetic+gazebo11用UR5+robotiq+Xbox Kinect抓取乐高_WalkOFF的博客-CSDN博客
报错解决:Conda虚拟环境下libp11-kit.so.0: undefined symbol: ffi_type_pointer...问题解决_Destinycjk的博客-CSDN博客
本项目主要参考以上几个链接实现,下面主要记录代码学习过程中一些要点。(更新中)
1. catkin build
catkin_make 和catkin build这两个命令的区别_孤独小马少的博客-CSDN博客
catkin build和catkin_make的区别和使用-CSDN博客
特别注意,当工作空间命名或路径改变时,需要清理之前的构建文件重新编译,可以直接使用catkin build,或者先catkin clean再catkin_make。
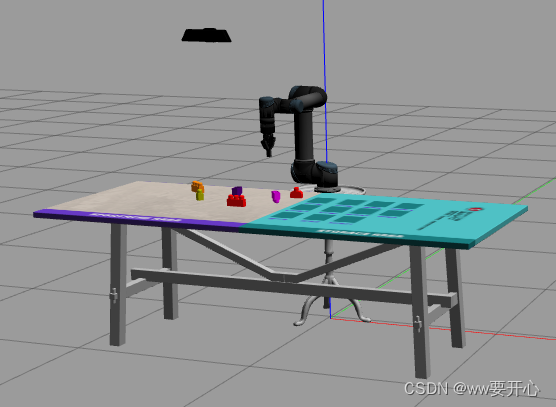
2. 启动世界
roslaunch levelManager lego_world.launch
加载机械臂模型和控制参数,启动节点levelManager.py。
3. 加载积木块
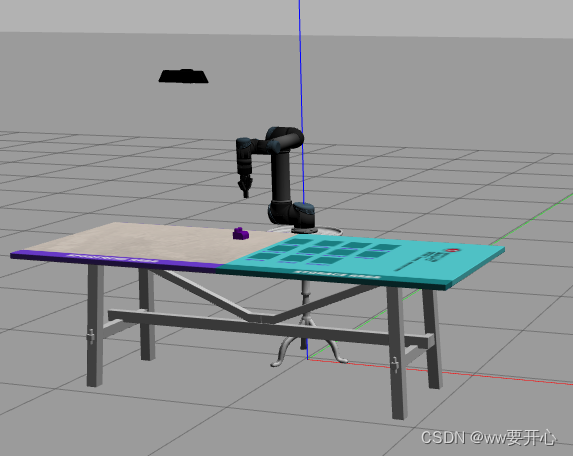
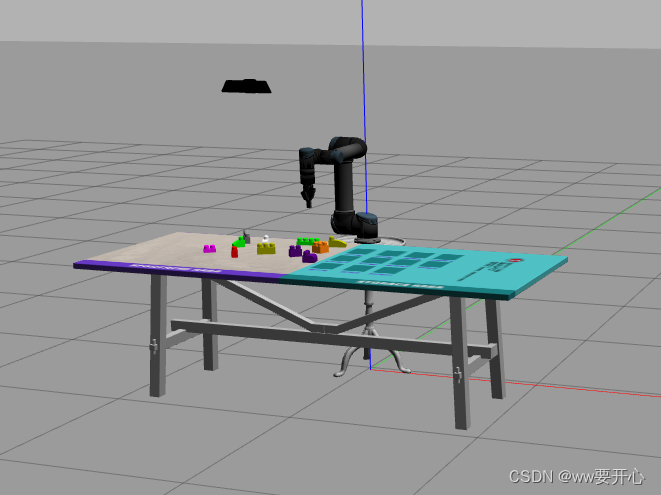
rosrun levelManager levelManager.py -l [level]level(从 1 到 4)代表任务级别。
level=1 level=2
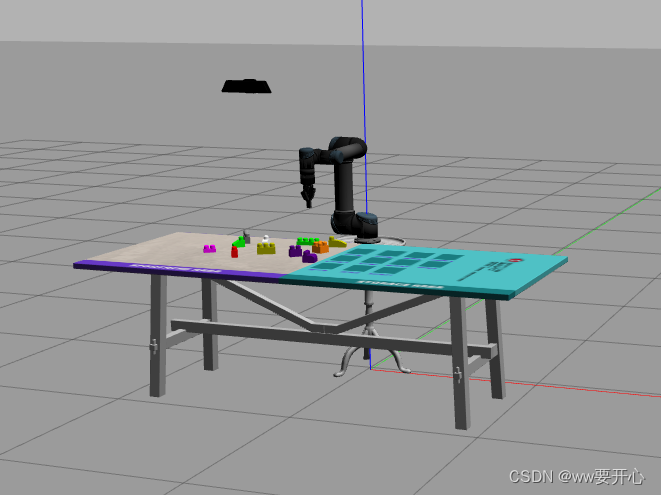
level=3 level=4
4. 启动运动学过程
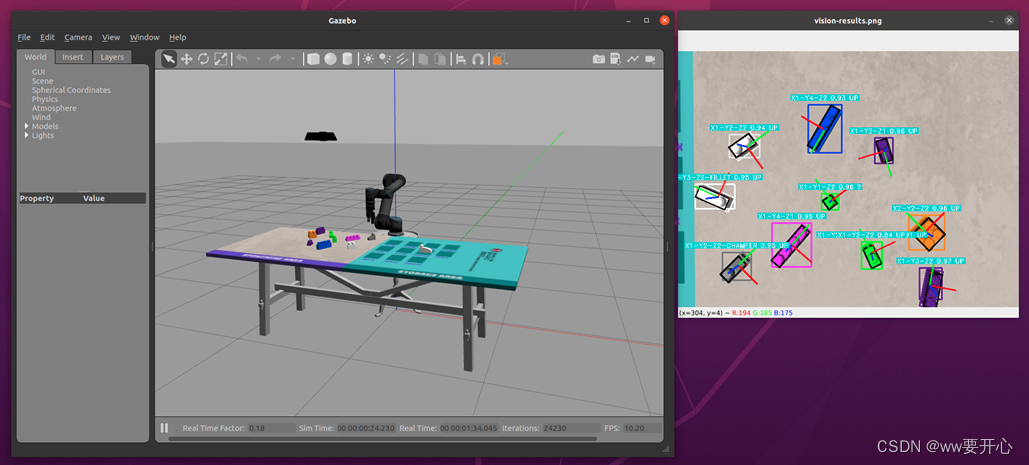
rosrun motion_planning motion_planning.py5. 启动本地化过程
rosrun vision lego-vision.py -show
















 3633
3633

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









