







 本文介绍了基于纯方位的粒子滤波目标跟踪系统模型,假设目标作匀速直线运动,详细阐述了状态方程和观测方程。同时,提供了MATLAB仿真的相关程序,包括main.m、distance.m等多个函数文件,用于实现粒子滤波算法的仿真过程。
本文介绍了基于纯方位的粒子滤波目标跟踪系统模型,假设目标作匀速直线运动,详细阐述了状态方程和观测方程。同时,提供了MATLAB仿真的相关程序,包括main.m、distance.m等多个函数文件,用于实现粒子滤波算法的仿真过程。
Github个人博客:https://joeyos.github.io
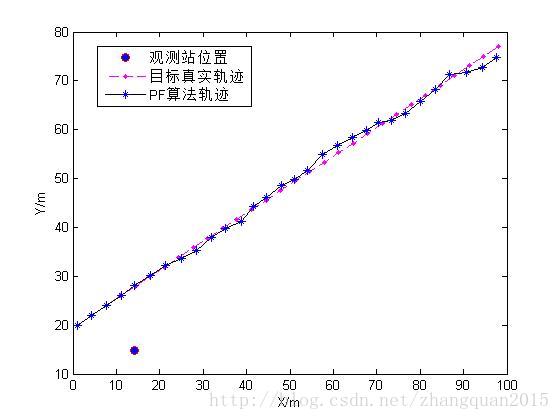
纯方位目标跟踪系统模型
假设目标做匀速直线运动,目标的状态为X(k)= [ xp(k) xv(k) yp(k) yv(k) ]T,很显然k时刻目标的位置为(xp(k) yp(k)),目标的速度(xv(k) yv(k))由水平方向和垂直方向的分速度构成。
状态方程:X(k+1)= AX(k) + Tw(k)
观测方程:Z(k) = arctan((y(k)-y0) / (x(k)-x0)) + v(k)
式中Z是观测站通过某种测距方式测得的与目标之间的角度,它是受得测量噪声v(k)的污染的。通常将上述观测方程表示为:Z(k) = h(X(k)) + v(k)
仿真程序
ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1336
1336

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









