







TF
什么是TF
在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何管理?
ROS给我们提供了一个坐标系的管理神器——TF。
- 所谓TF(TransForm),就是坐标转换
- 机器人要抓取一个物品,它是各种传感器发送回来的数据,然后它再处理各种数据进行操作。当机器人的"眼睛"获取一组数据,关于物体的坐标方位,但是相对于机器人手臂来说,这个坐标只是相对于机器人头部的传感器,并不直接适用于机器人手臂执行,那么物体相对于头部和手臂之间的坐标转换,就是TF.
- 坐标变换包括了位置和姿态两个方面的变换,ROS中的tf是一个可以让用户随时记录多个坐标系的软件包。tf保持缓存的树形结构中的坐标系之间的关系,并且允许用户在任何期望的时间点在任何两个坐标系之间转换点,矢量等.
机器人中的坐标系
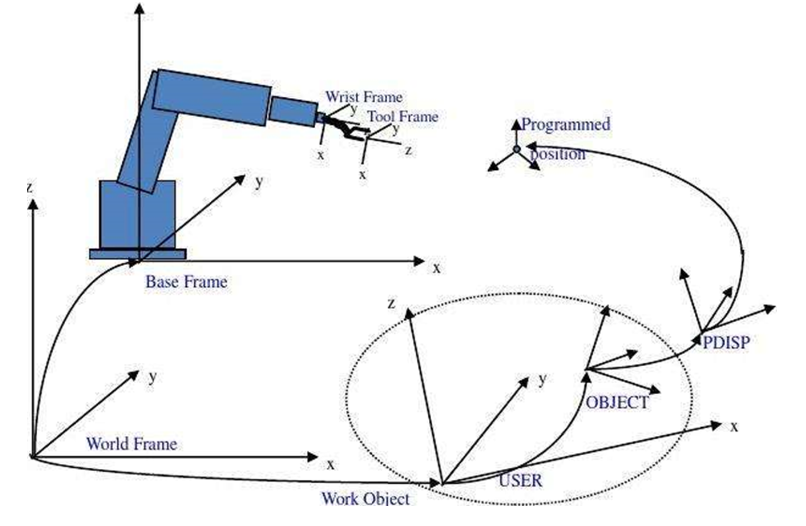
比如在机械臂形态的机器人中:
- 机器人安装的位置叫做基坐标系Base Frame
- 机器人安装位置在外部环境下的参考系叫做世界坐标系World Frame
- 机器人末端夹爪的位置叫做工具坐标系
- 外部被操作物体的位置叫做工件坐标系
在机械臂抓取外部物体的过程中,这些坐标系之间的关系也在跟随变化。
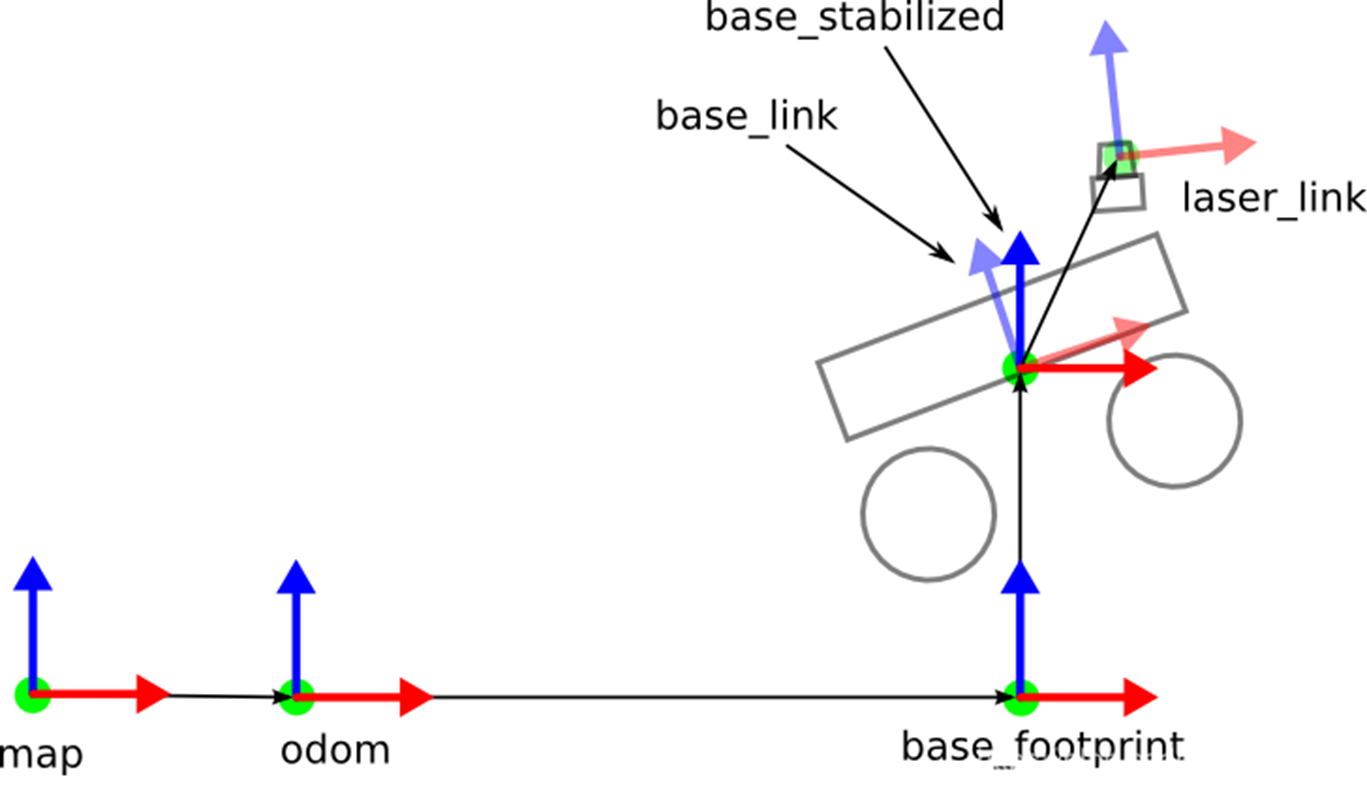
在移动机器人系统中,坐标系一样至关重要,比如一个移动机器人的中心点是基坐标系Base Link,雷达所在的位置叫做雷达坐标系laser link,机器人要移动,里程计会累积位置,这个位置的参考系叫做里程计坐标系odom,里程计又会有累积误差和漂移,绝对位置的参考系叫做地图坐标系map。
一层一层坐标系之间关系复杂,有一些是相对固定的,也有一些是不断变化的,看似简单的坐标系也在空间范围内变得复杂,良好的坐标系管理系统就显得格外重要。
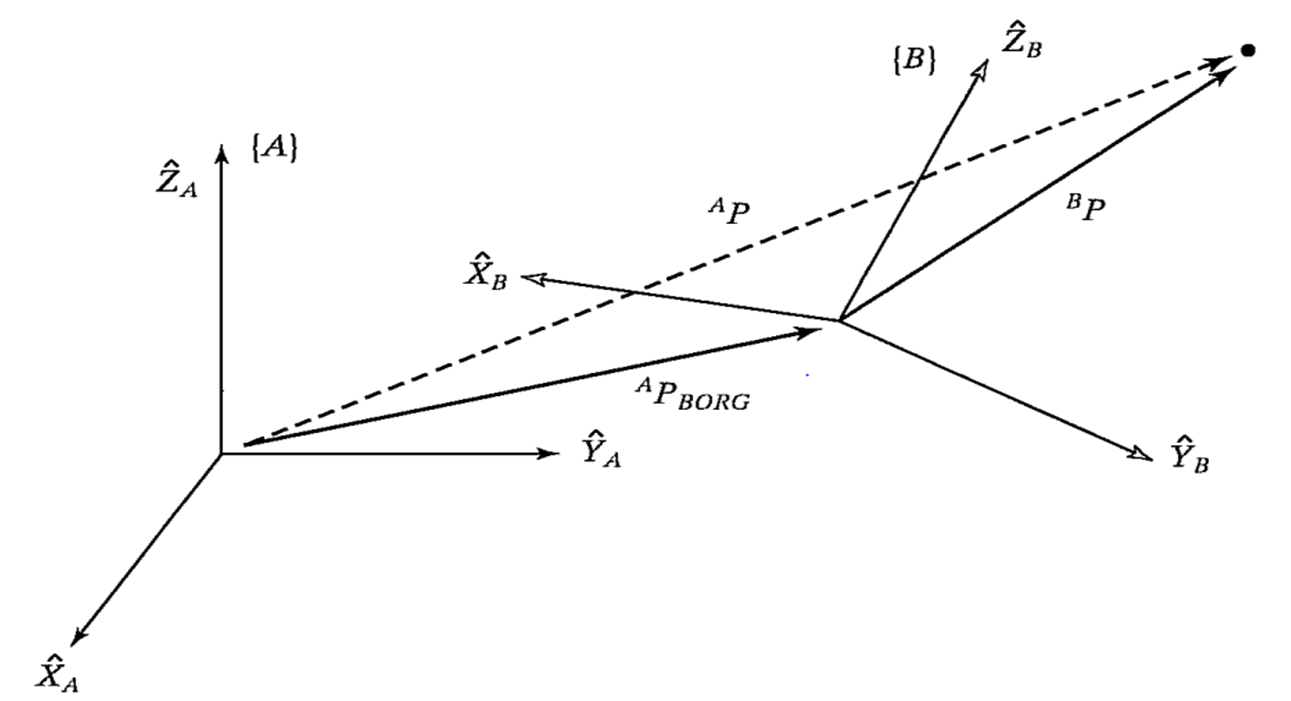
关于坐标系变换关系的基本理论,可以分解为平移和旋转两个部分,通过一个四乘四的矩阵进行描述,在空间中画出坐标系,那两者之间的变换关系,其实就是向量的数学描述。
ROS中TF功能的底层原理,就是对这些数学变换进行了封装















 6985
6985











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









